
基于AGV小车的车辆停放方法.pdf

一只****iu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于AGV小车的车辆停放方法.pdf
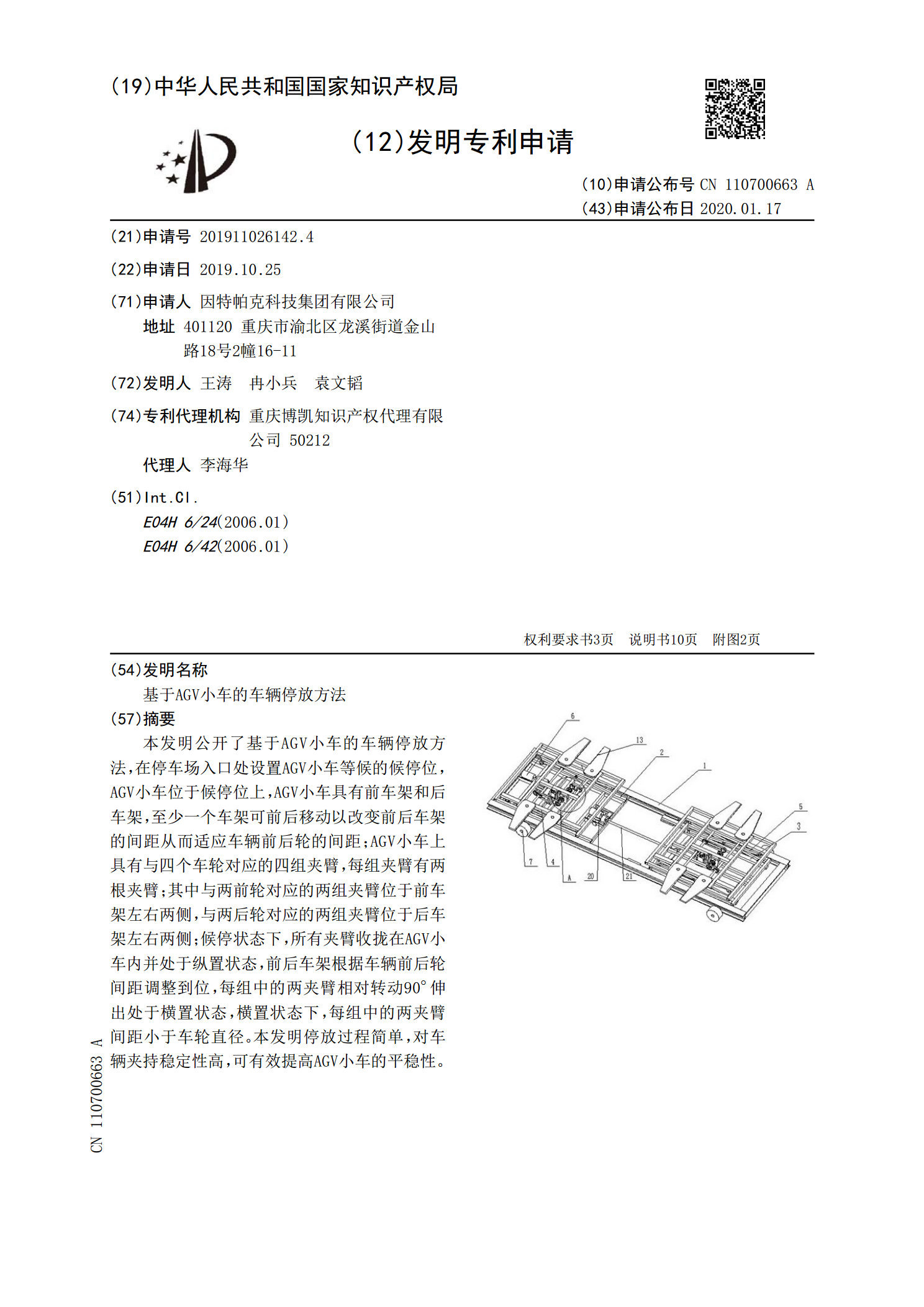
本发明公开了基于AGV小车的车辆停放方法,在停车场入口处设置AGV小车等候的候停位,AGV小车位于候停位上,AGV小车具有前车架和后车架,至少一个车架可前后移动以改变前后车架的间距从而适应车辆前后轮的间距;AGV小车上具有与四个车轮对应的四组夹臂,每组夹臂有两根夹臂;其中与两前轮对应的两组夹臂位于前车架左右两侧,与两后轮对应的两组夹臂位于后车架左右两侧;候停状态下,所有夹臂收拢在AGV小车内并处于纵置状态,前后车架根据车辆前后轮间距调整到位,每组中的两夹臂相对转动90°伸出处于横置状态,横置状态下,每组中
一种基于AGV小车的对接定位校准方法及AGV小车.pdf
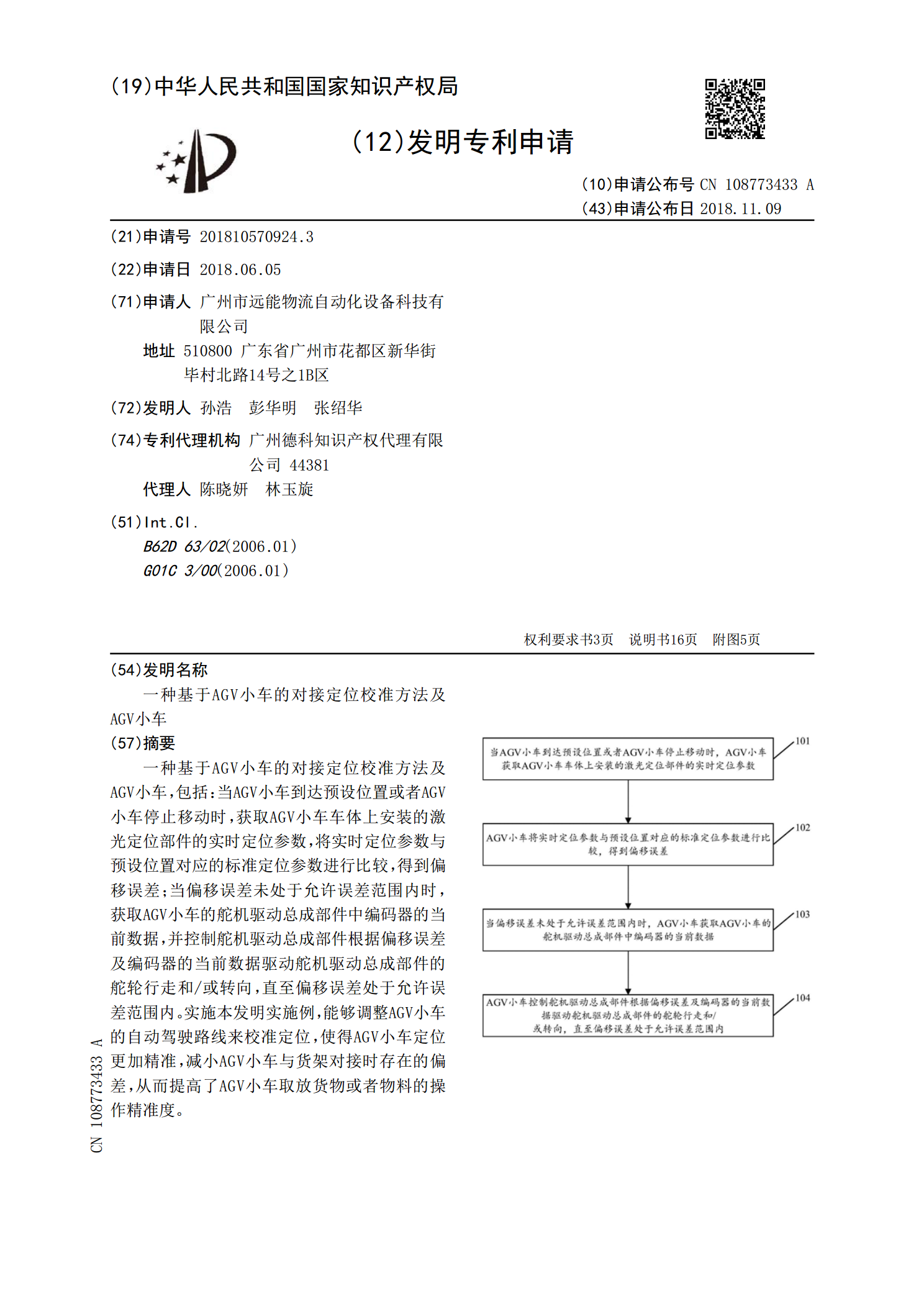
一种基于AGV小车的对接定位校准方法及AGV小车,包括:当AGV小车到达预设位置或者AGV小车停止移动时,获取AGV小车车体上安装的激光定位部件的实时定位参数,将实时定位参数与预设位置对应的标准定位参数进行比较,得到偏移误差;当偏移误差未处于允许误差范围内时,获取AGV小车的舵机驱动总成部件中编码器的当前数据,并控制舵机驱动总成部件根据偏移误差及编码器的当前数据驱动舵机驱动总成部件的舵轮行走和/或转向,直至偏移误差处于允许误差范围内。实施本发明实施例,能够调整AGV小车的自动驾驶路线来校准定位,使得AGV
AGV小车的物理参数校核方法以及AGV小车.pdf
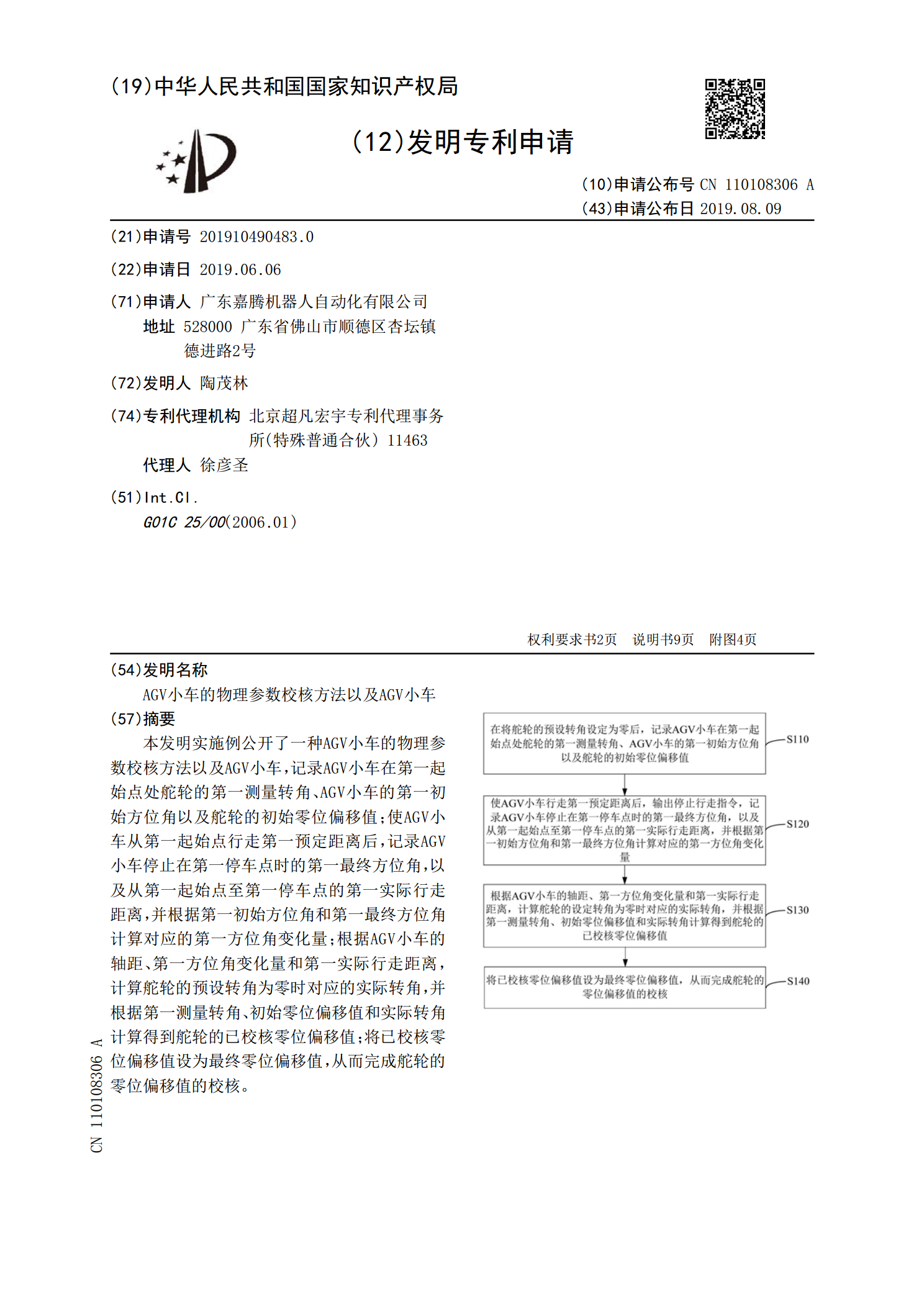
本发明实施例公开了一种AGV小车的物理参数校核方法以及AGV小车,记录AGV小车在第一起始点处舵轮的第一测量转角、AGV小车的第一初始方位角以及舵轮的初始零位偏移值;使AGV小车从第一起始点行走第一预定距离后,记录AGV小车停止在第一停车点时的第一最终方位角,以及从第一起始点至第一停车点的第一实际行走距离,并根据第一初始方位角和第一最终方位角计算对应的第一方位角变化量;根据AGV小车的轴距、第一方位角变化量和第一实际行走距离,计算舵轮的预设转角为零时对应的实际转角,并根据第一测量转角、初始零位偏移值和实际
AGV小车底盘、AGV小车及其激光防撞雷达检测方法.pdf
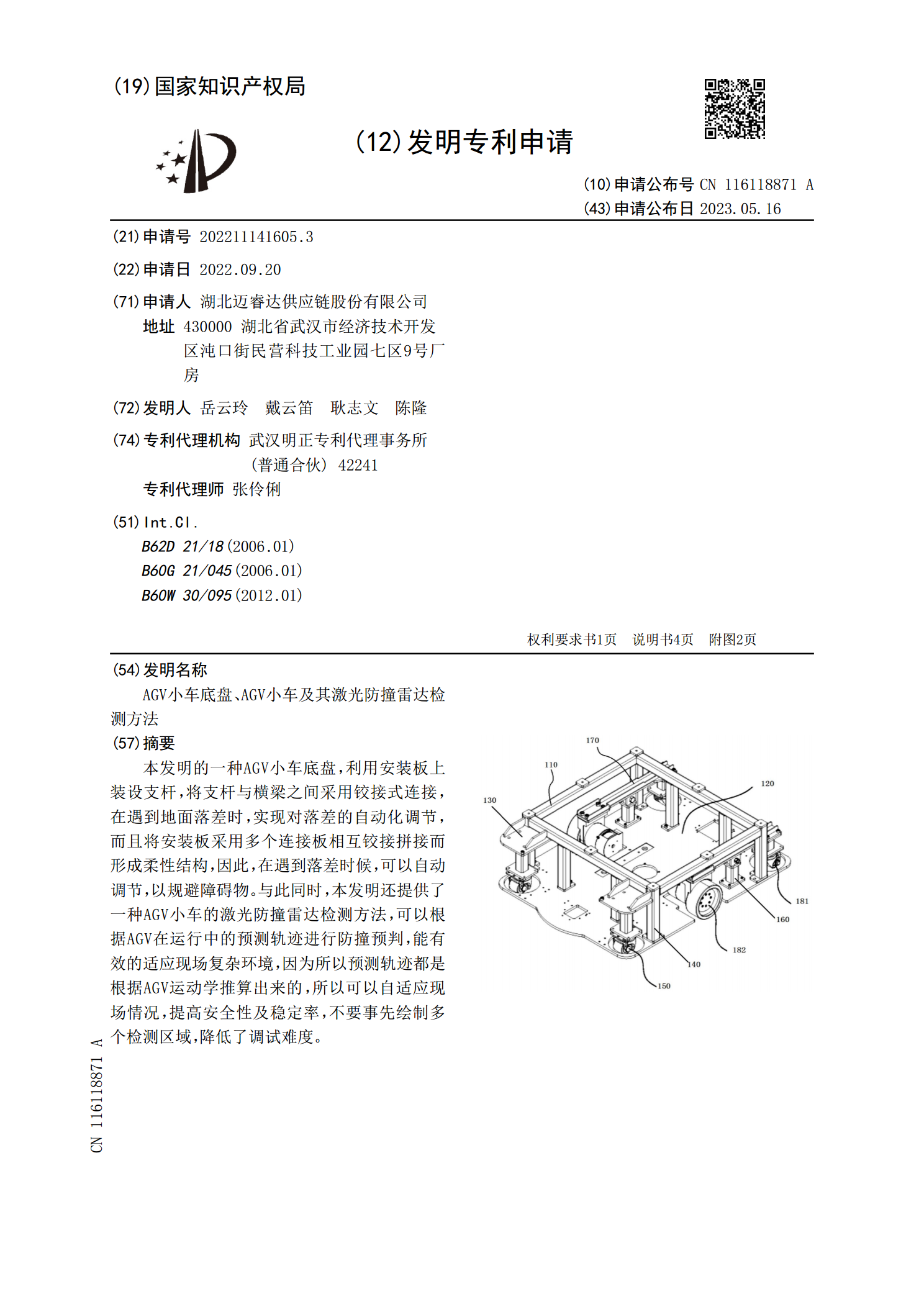
本发明的一种AGV小车底盘,利用安装板上装设支杆,将支杆与横梁之间采用铰接式连接,在遇到地面落差时,实现对落差的自动化调节,而且将安装板采用多个连接板相互铰接拼接而形成柔性结构,因此,在遇到落差时候,可以自动调节,以规避障碍物。与此同时,本发明还提供了一种AGV小车的激光防撞雷达检测方法,可以根据AGV在运行中的预测轨迹进行防撞预判,能有效的适应现场复杂环境,因为所以预测轨迹都是根据AGV运动学推算出来的,所以可以自适应现场情况,提高安全性及稳定率,不要事先绘制多个检测区域,降低了调试难度。
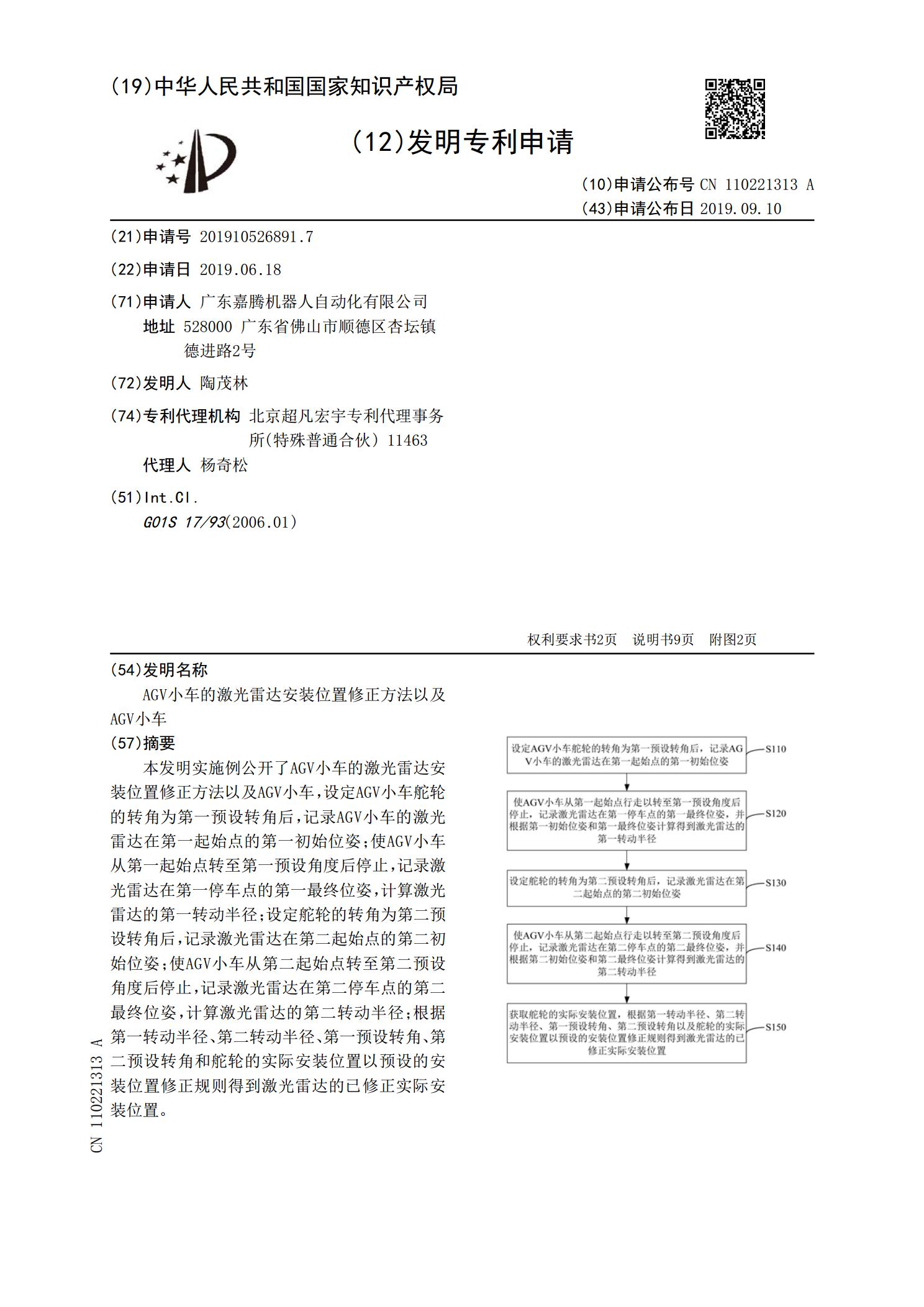
AGV小车的激光雷达安装位置修正方法以及AGV小车.pdf
本发明实施例公开了AGV小车的激光雷达安装位置修正方法以及AGV小车,设定AGV小车舵轮的转角为第一预设转角后,记录AGV小车的激光雷达在第一起始点的第一初始位姿;使AGV小车从第一起始点转至第一预设角度后停止,记录激光雷达在第一停车点的第一最终位姿,计算激光雷达的第一转动半径;设定舵轮的转角为第二预设转角后,记录激光雷达在第二起始点的第二初始位姿;使AGV小车从第二起始点转至第二预设角度后停止,记录激光雷达在第二停车点的第二最终位姿,计算激光雷达的第二转动半径;根据第一转动半径、第二转动半径、第一预设转