
AGV小车的物理参数校核方法以及AGV小车.pdf

书生****aa

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
AGV小车的物理参数校核方法以及AGV小车.pdf
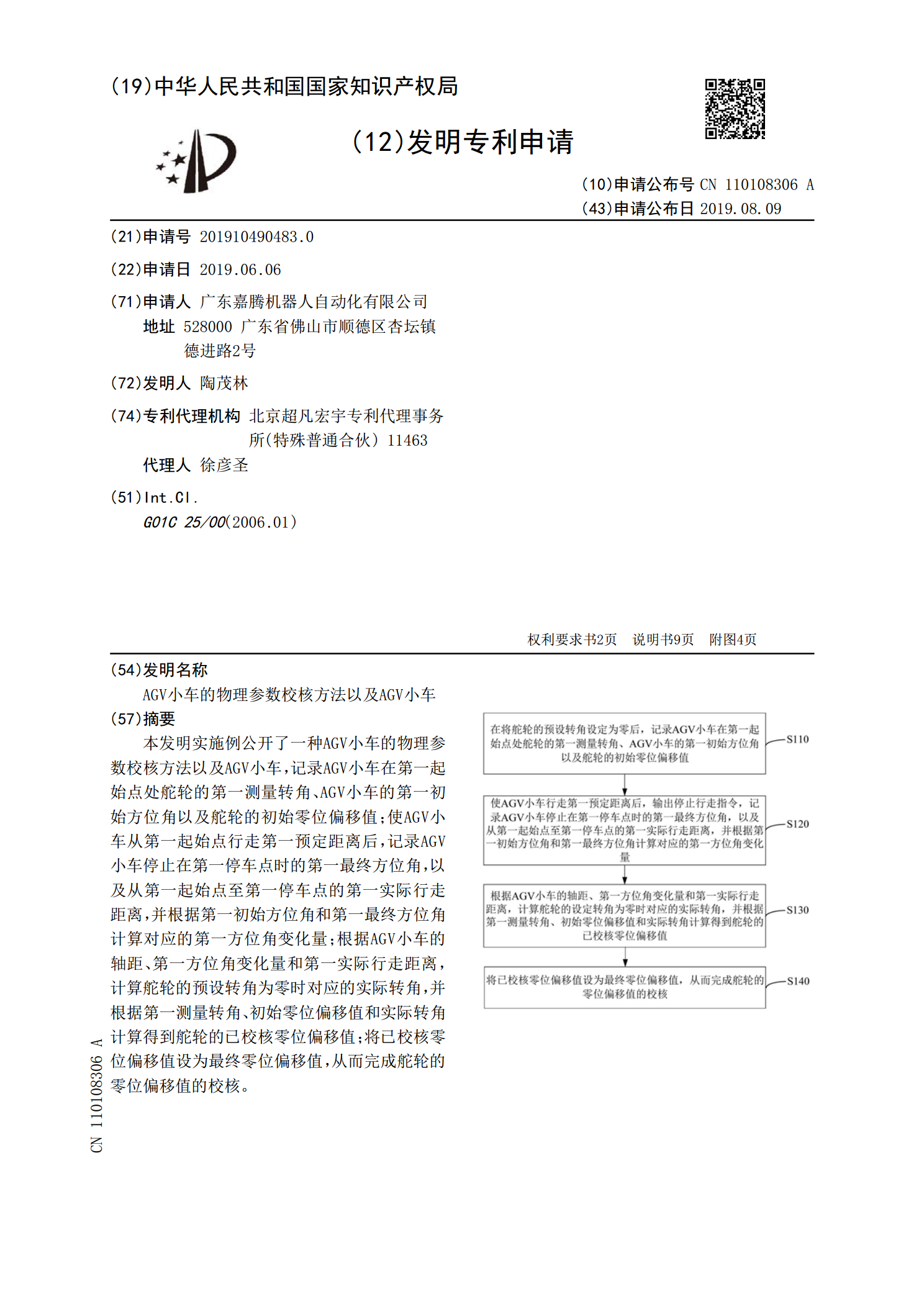
本发明实施例公开了一种AGV小车的物理参数校核方法以及AGV小车,记录AGV小车在第一起始点处舵轮的第一测量转角、AGV小车的第一初始方位角以及舵轮的初始零位偏移值;使AGV小车从第一起始点行走第一预定距离后,记录AGV小车停止在第一停车点时的第一最终方位角,以及从第一起始点至第一停车点的第一实际行走距离,并根据第一初始方位角和第一最终方位角计算对应的第一方位角变化量;根据AGV小车的轴距、第一方位角变化量和第一实际行走距离,计算舵轮的预设转角为零时对应的实际转角,并根据第一测量转角、初始零位偏移值和实际

AGV运动导航核心控制器的物理参数校核方法以及AGV小车.pdf
本发明公开了一种AGV运动导航核心控制器的物理参数校核方法以及AGV小车,包括车体外壳,车体外壳的两个侧面上分别开有散热孔,车体外壳上设有散热孔的侧面上,一侧面上设有红外线感应器二,另一侧面上设有红外线感应器三,车体外壳上设有红外线感应器二的一侧面上还设有红外线接收器二,车体外壳上设有红外线感应器三的一侧面上还设有红外线接收器三,车体外壳的底端分别对称的设有四个矩形槽,矩形槽内分别设有车轮,前端的两个车轮之间连接有转轴一,十字固定块插接在圆台上的十字卡槽内,后端左侧的圆台上设有电机二,电机二的输出轴设有十
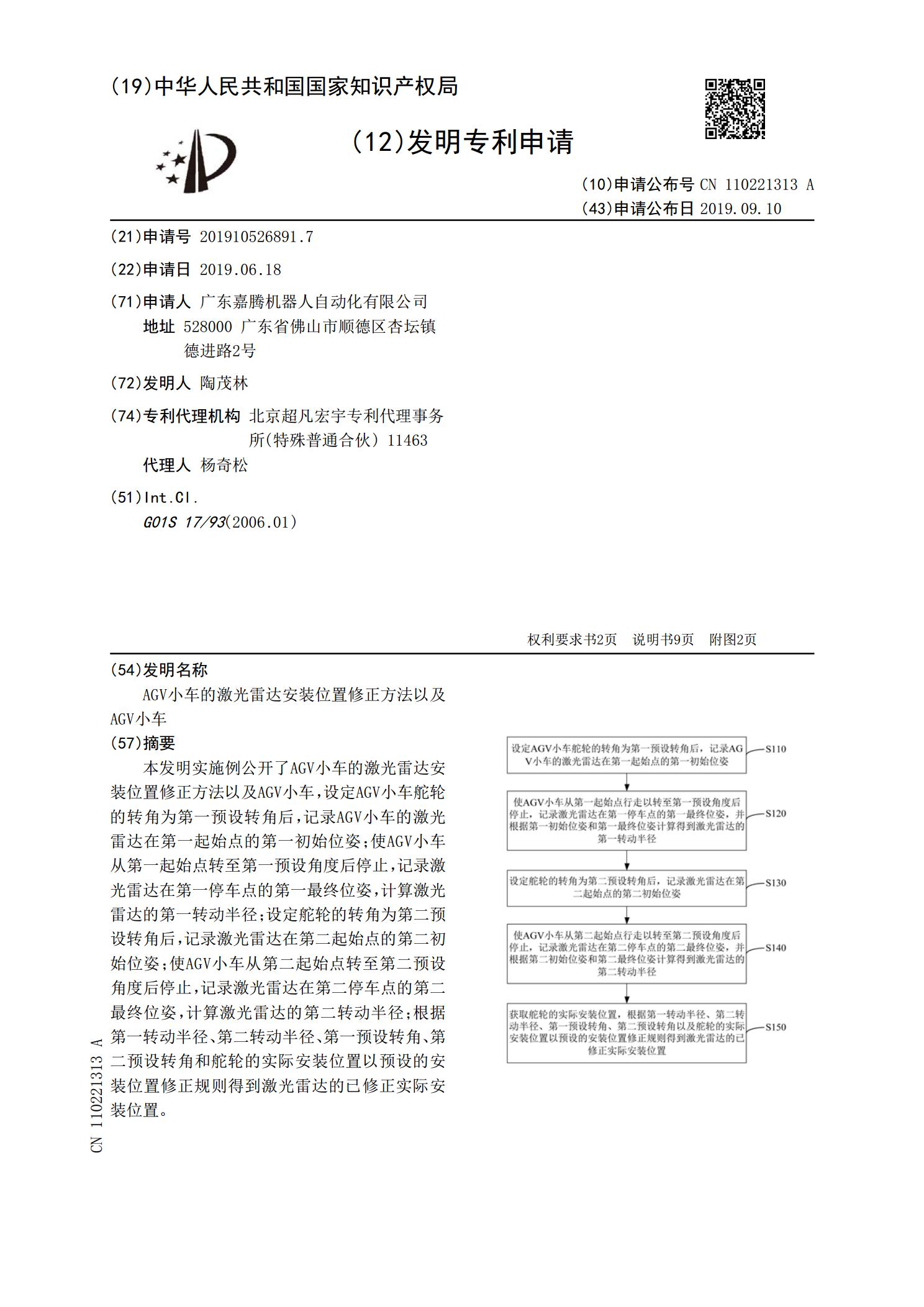
AGV小车的激光雷达安装位置修正方法以及AGV小车.pdf
本发明实施例公开了AGV小车的激光雷达安装位置修正方法以及AGV小车,设定AGV小车舵轮的转角为第一预设转角后,记录AGV小车的激光雷达在第一起始点的第一初始位姿;使AGV小车从第一起始点转至第一预设角度后停止,记录激光雷达在第一停车点的第一最终位姿,计算激光雷达的第一转动半径;设定舵轮的转角为第二预设转角后,记录激光雷达在第二起始点的第二初始位姿;使AGV小车从第二起始点转至第二预设角度后停止,记录激光雷达在第二停车点的第二最终位姿,计算激光雷达的第二转动半径;根据第一转动半径、第二转动半径、第一预设转

具有提升功能的AGV驱动、以及AGV小车.pdf
本发明提供一种具有提升功能的AGV驱动、以及AGV小车,其中,AGV驱动包括:驱动本体和提升部,提升部包括:提升块、凸轮随动器组件和推杆,凸轮随动器组件通过移动与提升块接触或脱离;本发明的AGV驱动,通过推杆驱动凸轮随动器组件进行往复移动,凸轮随动器组件在朝向提升块的方向移动的过程中,与提升块接触,从而将提升块顶起一定距离,使提升块带动连接杆一起被提升,凸轮随动器组件在朝向远离提升块的方向移动的过程中,与提升块脱离,从而使提升块能够落下,相比于采用电机驱动能够更加便于控制和调试,同时,在进行提升部的安装时
AGV底盘及AGV小车.pdf
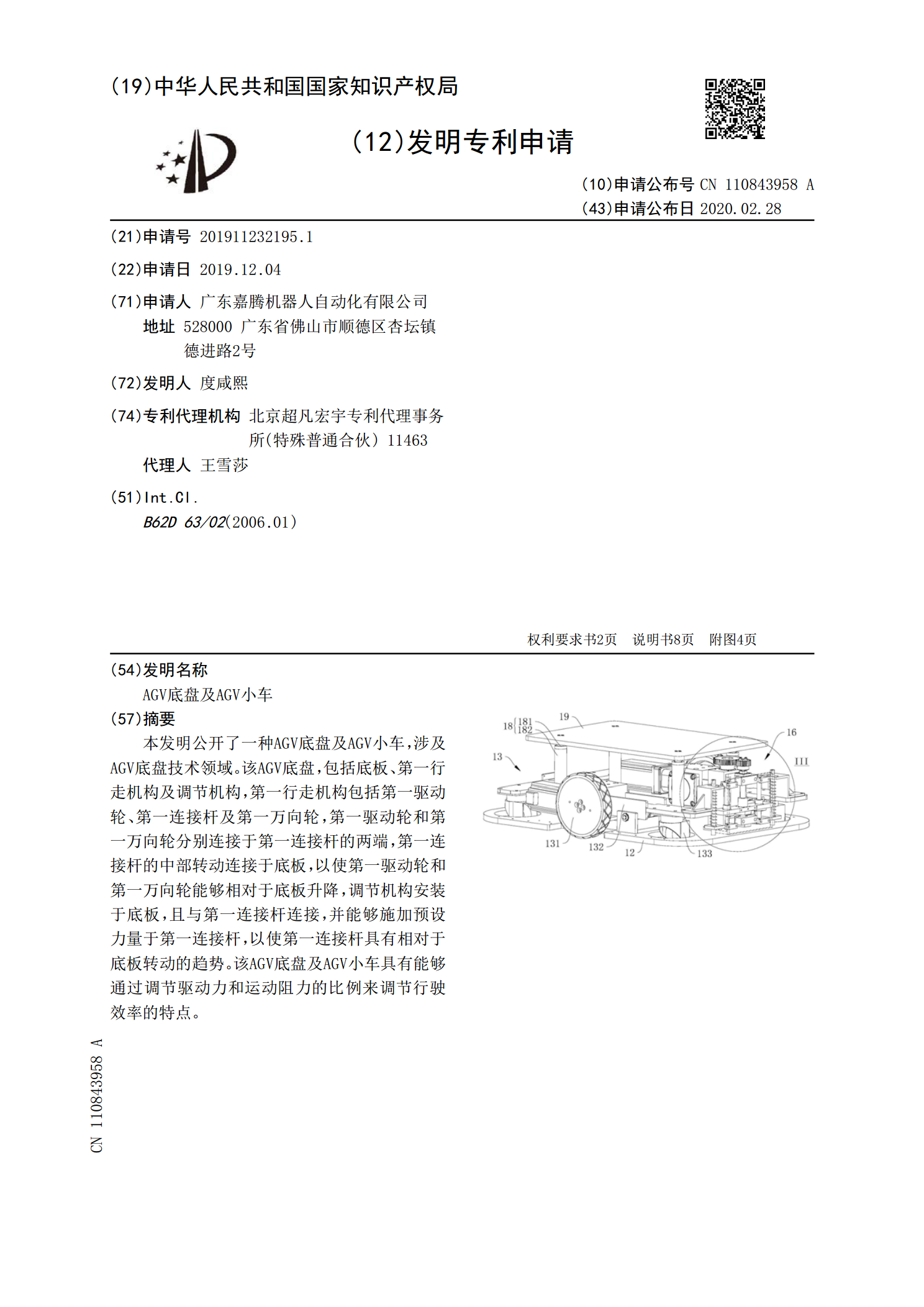
本发明公开了一种AGV底盘及AGV小车,涉及AGV底盘技术领域。该AGV底盘,包括底板、第一行走机构及调节机构,第一行走机构包括第一驱动轮、第一连接杆及第一万向轮,第一驱动轮和第一万向轮分别连接于第一连接杆的两端,第一连接杆的中部转动连接于底板,以使第一驱动轮和第一万向轮能够相对于底板升降,调节机构安装于底板,且与第一连接杆连接,并能够施加预设力量于第一连接杆,以使第一连接杆具有相对于底板转动的趋势。该AGV底盘及AGV小车具有能够通过调节驱动力和运动阻力的比例来调节行驶效率的特点。