
AGV小车底盘、AGV小车及其激光防撞雷达检测方法.pdf

和裕****az

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
AGV小车底盘、AGV小车及其激光防撞雷达检测方法.pdf
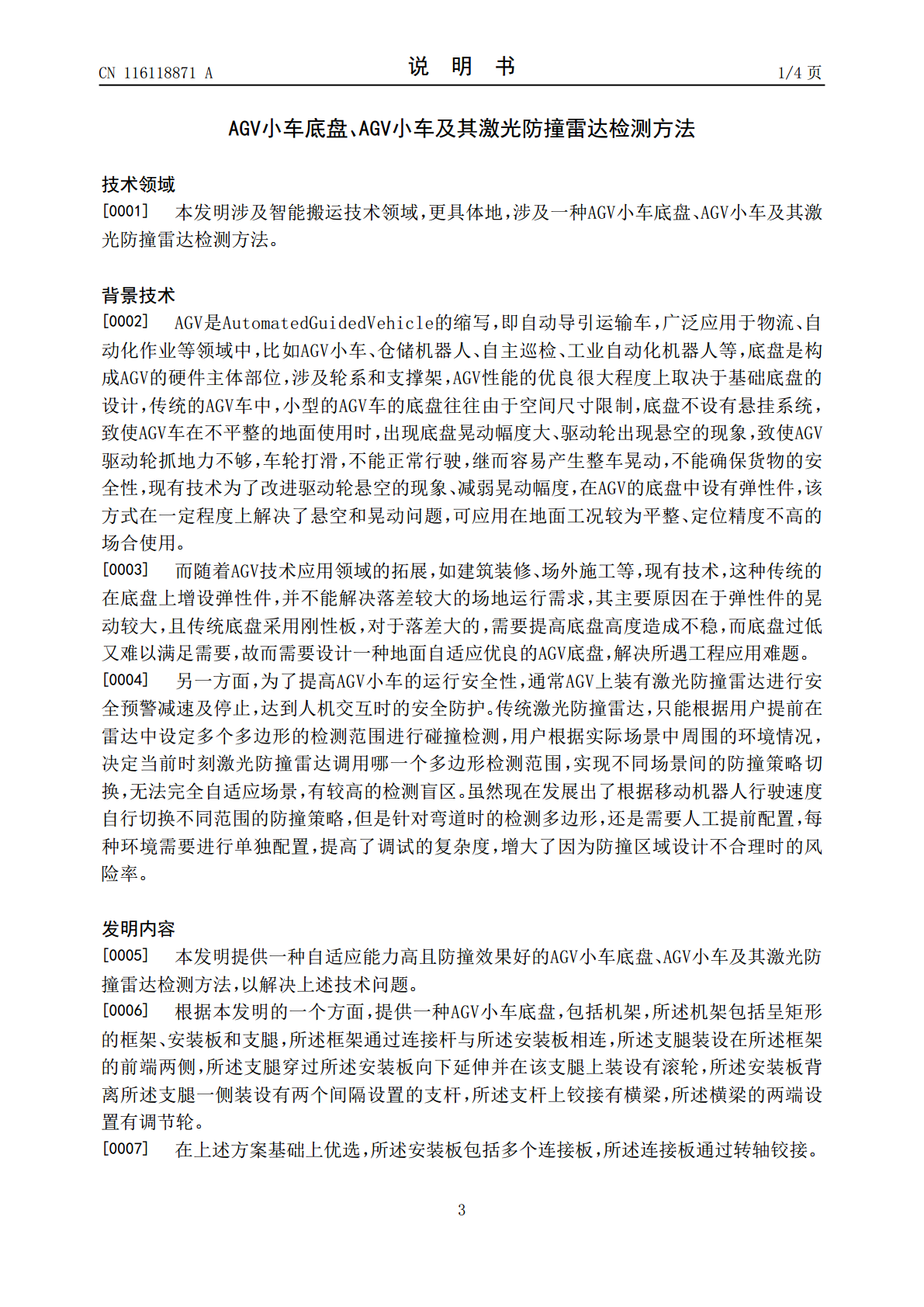
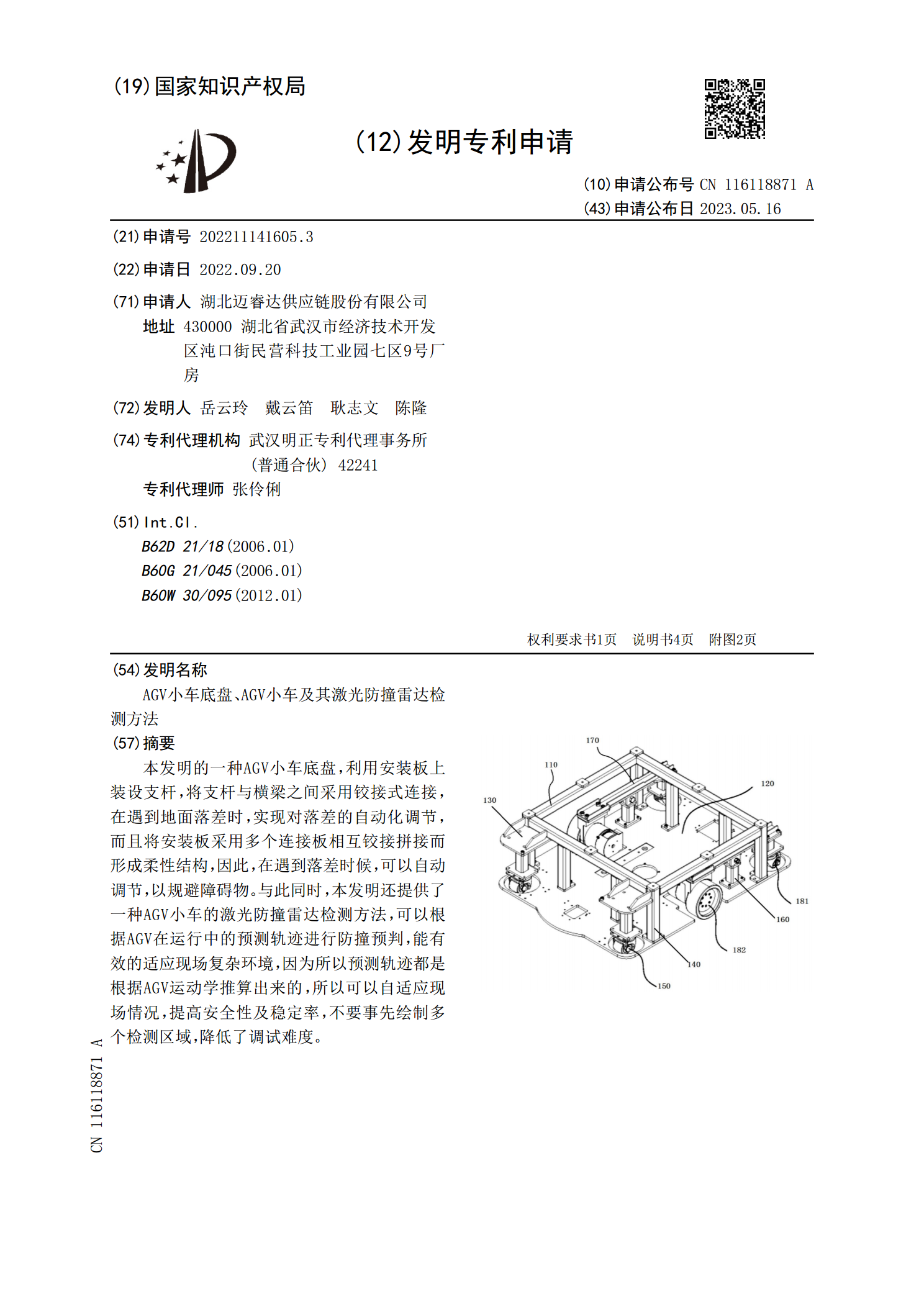
本发明的一种AGV小车底盘,利用安装板上装设支杆,将支杆与横梁之间采用铰接式连接,在遇到地面落差时,实现对落差的自动化调节,而且将安装板采用多个连接板相互铰接拼接而形成柔性结构,因此,在遇到落差时候,可以自动调节,以规避障碍物。与此同时,本发明还提供了一种AGV小车的激光防撞雷达检测方法,可以根据AGV在运行中的预测轨迹进行防撞预判,能有效的适应现场复杂环境,因为所以预测轨迹都是根据AGV运动学推算出来的,所以可以自适应现场情况,提高安全性及稳定率,不要事先绘制多个检测区域,降低了调试难度。
AGV底盘及AGV小车.pdf
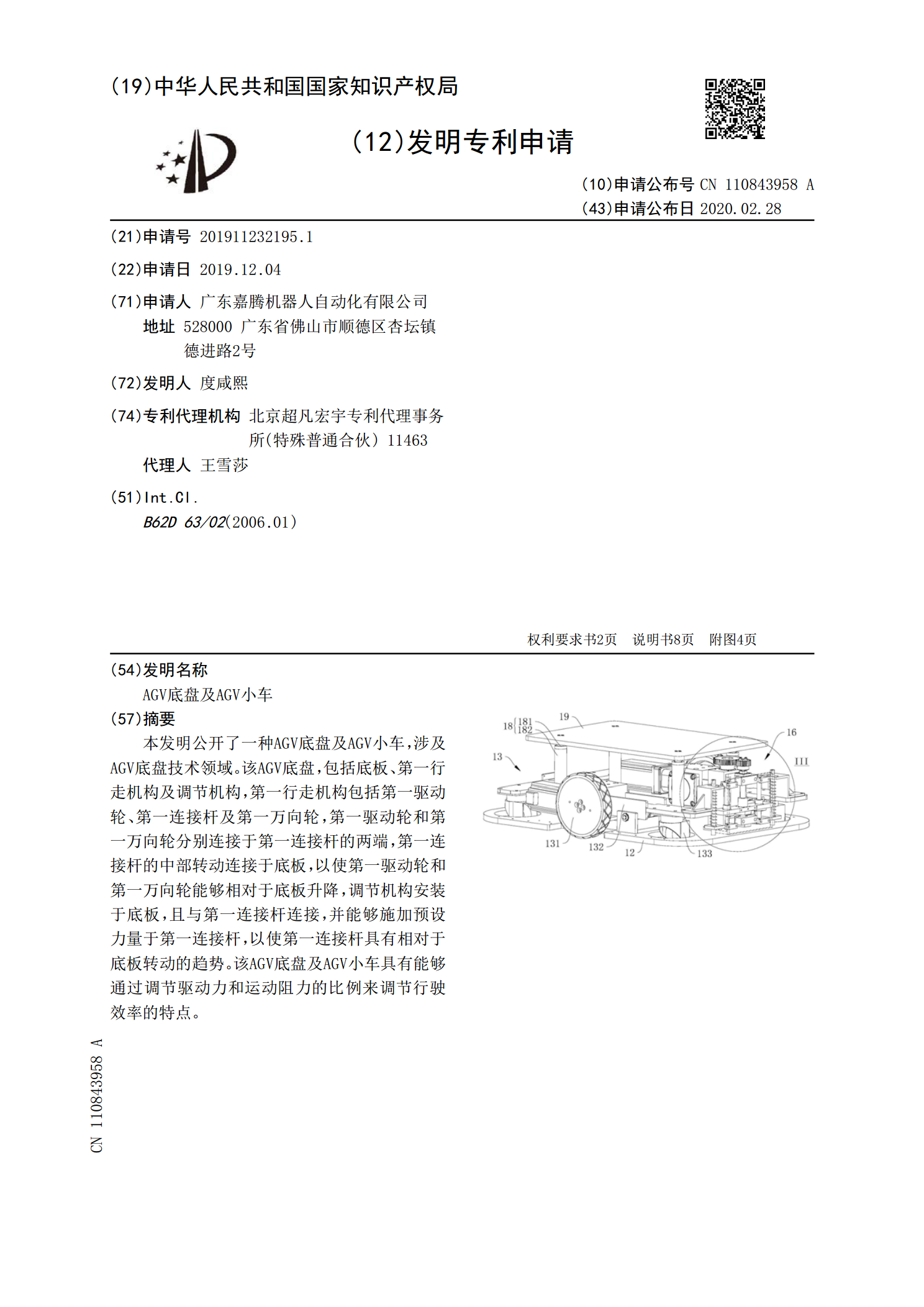
本发明公开了一种AGV底盘及AGV小车,涉及AGV底盘技术领域。该AGV底盘,包括底板、第一行走机构及调节机构,第一行走机构包括第一驱动轮、第一连接杆及第一万向轮,第一驱动轮和第一万向轮分别连接于第一连接杆的两端,第一连接杆的中部转动连接于底板,以使第一驱动轮和第一万向轮能够相对于底板升降,调节机构安装于底板,且与第一连接杆连接,并能够施加预设力量于第一连接杆,以使第一连接杆具有相对于底板转动的趋势。该AGV底盘及AGV小车具有能够通过调节驱动力和运动阻力的比例来调节行驶效率的特点。
AGV小车的激光雷达安装位置修正方法以及AGV小车.pdf
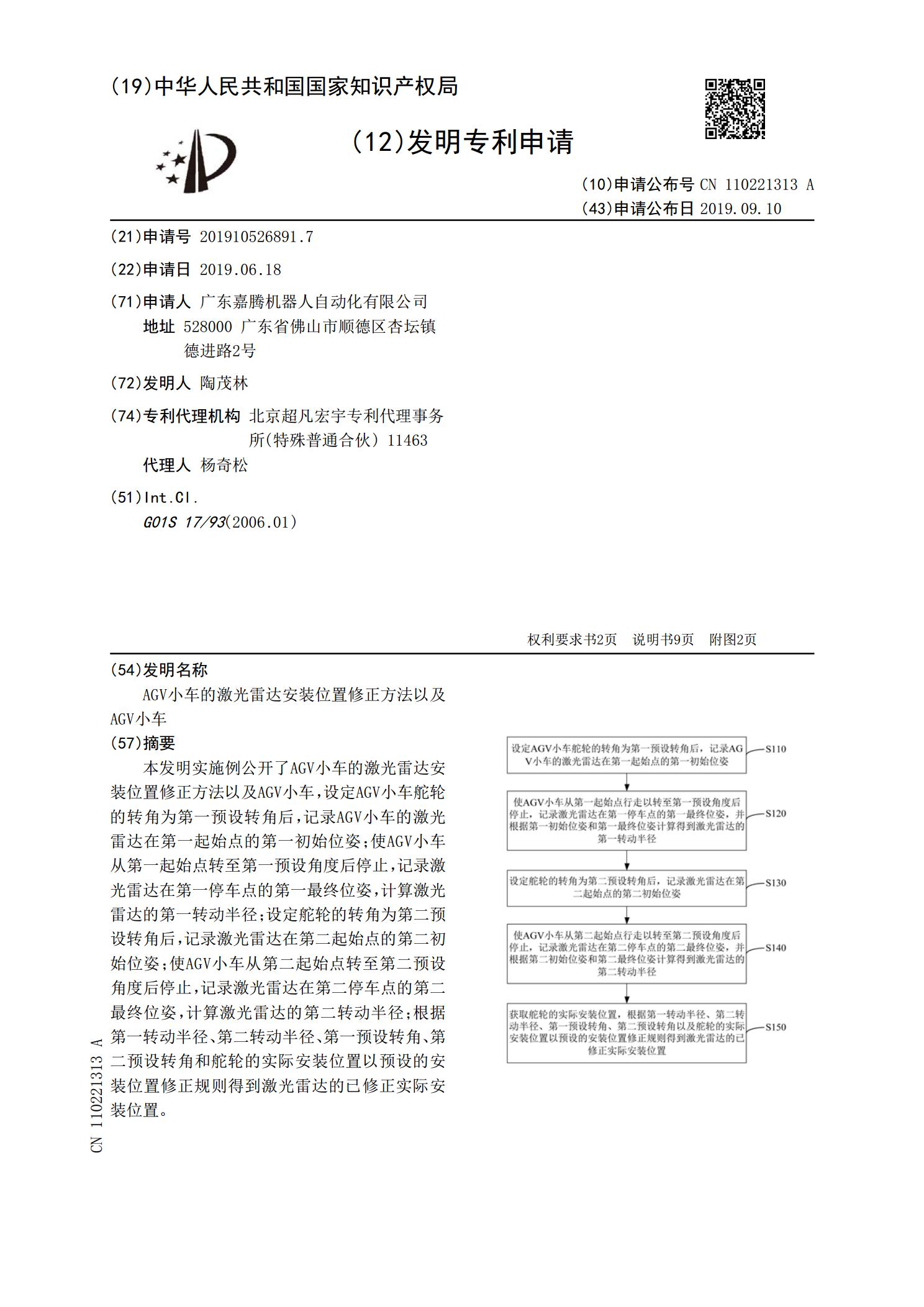
本发明实施例公开了AGV小车的激光雷达安装位置修正方法以及AGV小车,设定AGV小车舵轮的转角为第一预设转角后,记录AGV小车的激光雷达在第一起始点的第一初始位姿;使AGV小车从第一起始点转至第一预设角度后停止,记录激光雷达在第一停车点的第一最终位姿,计算激光雷达的第一转动半径;设定舵轮的转角为第二预设转角后,记录激光雷达在第二起始点的第二初始位姿;使AGV小车从第二起始点转至第二预设角度后停止,记录激光雷达在第二停车点的第二最终位姿,计算激光雷达的第二转动半径;根据第一转动半径、第二转动半径、第一预设转
底盘及AGV小车.pdf
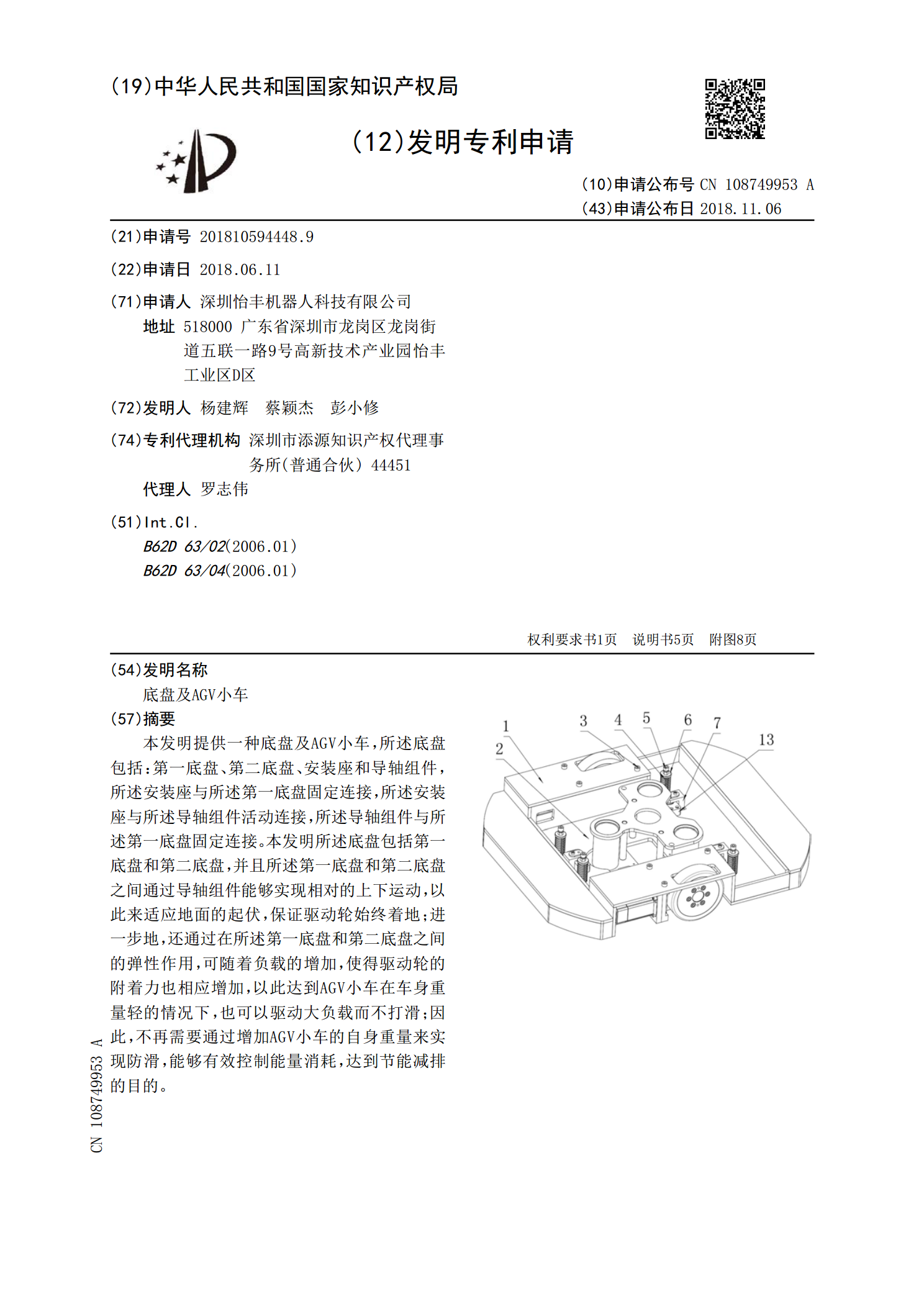
本发明提供一种底盘及AGV小车,所述底盘包括:第一底盘、第二底盘、安装座和导轴组件,所述安装座与所述第一底盘固定连接,所述安装座与所述导轴组件活动连接,所述导轴组件与所述第一底盘固定连接。本发明所述底盘包括第一底盘和第二底盘,并且所述第一底盘和第二底盘之间通过导轴组件能够实现相对的上下运动,以此来适应地面的起伏,保证驱动轮始终着地;进一步地,还通过在所述第一底盘和第二底盘之间的弹性作用,可随着负载的增加,使得驱动轮的附着力也相应增加,以此达到AGV小车在车身重量轻的情况下,也可以驱动大负载而不打滑;因此,
一种AGV底盘及AGV小车.pdf
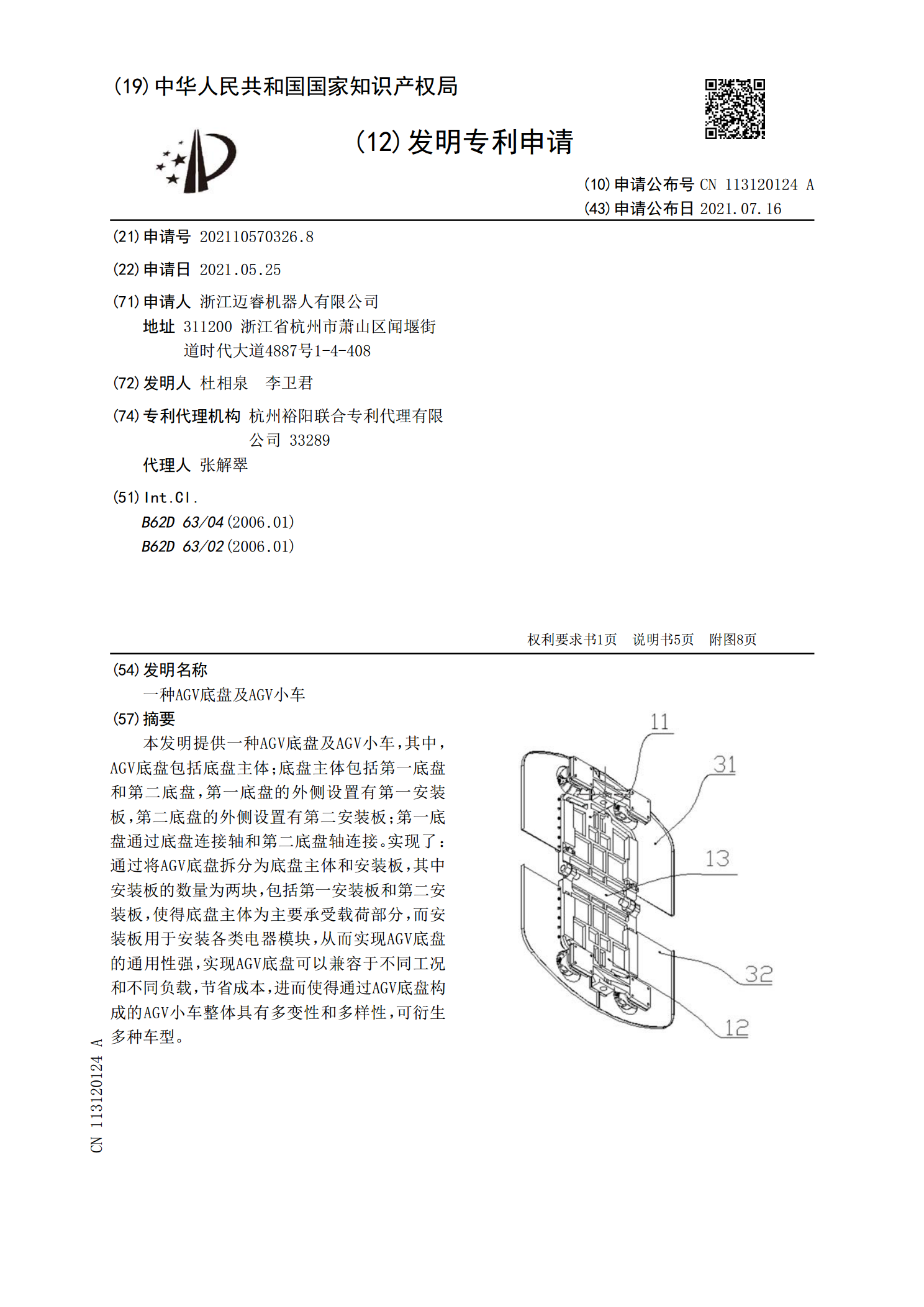
本发明提供一种AGV底盘及AGV小车,其中,AGV底盘包括底盘主体;底盘主体包括第一底盘和第二底盘,第一底盘的外侧设置有第一安装板,第二底盘的外侧设置有第二安装板;第一底盘通过底盘连接轴和第二底盘轴连接。实现了:通过将AGV底盘拆分为底盘主体和安装板,其中安装板的数量为两块,包括第一安装板和第二安装板,使得底盘主体为主要承受载荷部分,而安装板用于安装各类电器模块,从而实现AGV底盘的通用性强,实现AGV底盘可以兼容于不同工况和不同负载,节省成本,进而使得通过AGV底盘构成的AGV小车整体具有多变性和多样性