
一种基于远程控制的智能喷涂机器人.pdf

Ma****57

1/6
2/6

3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于远程控制的智能喷涂机器人.pdf
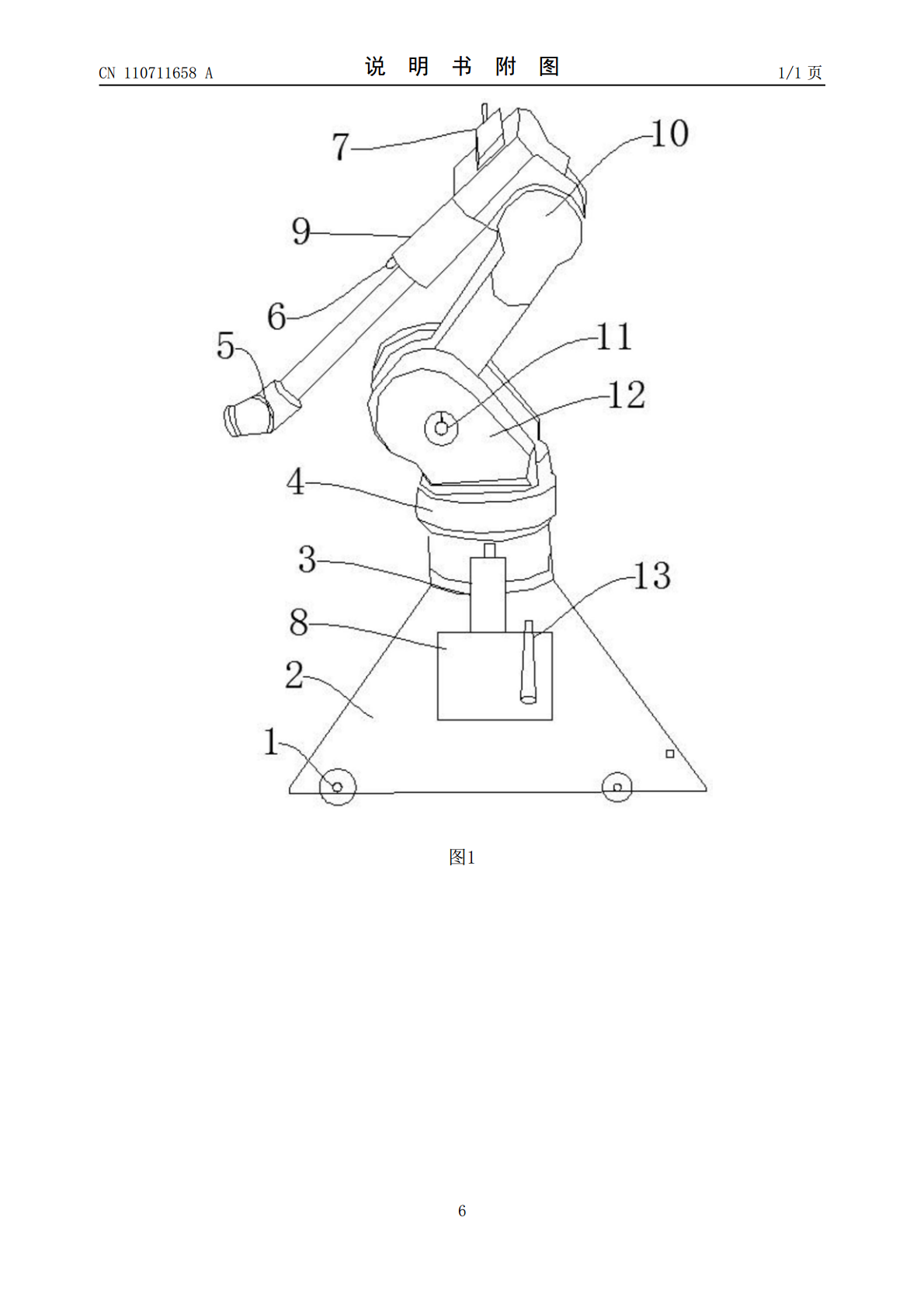
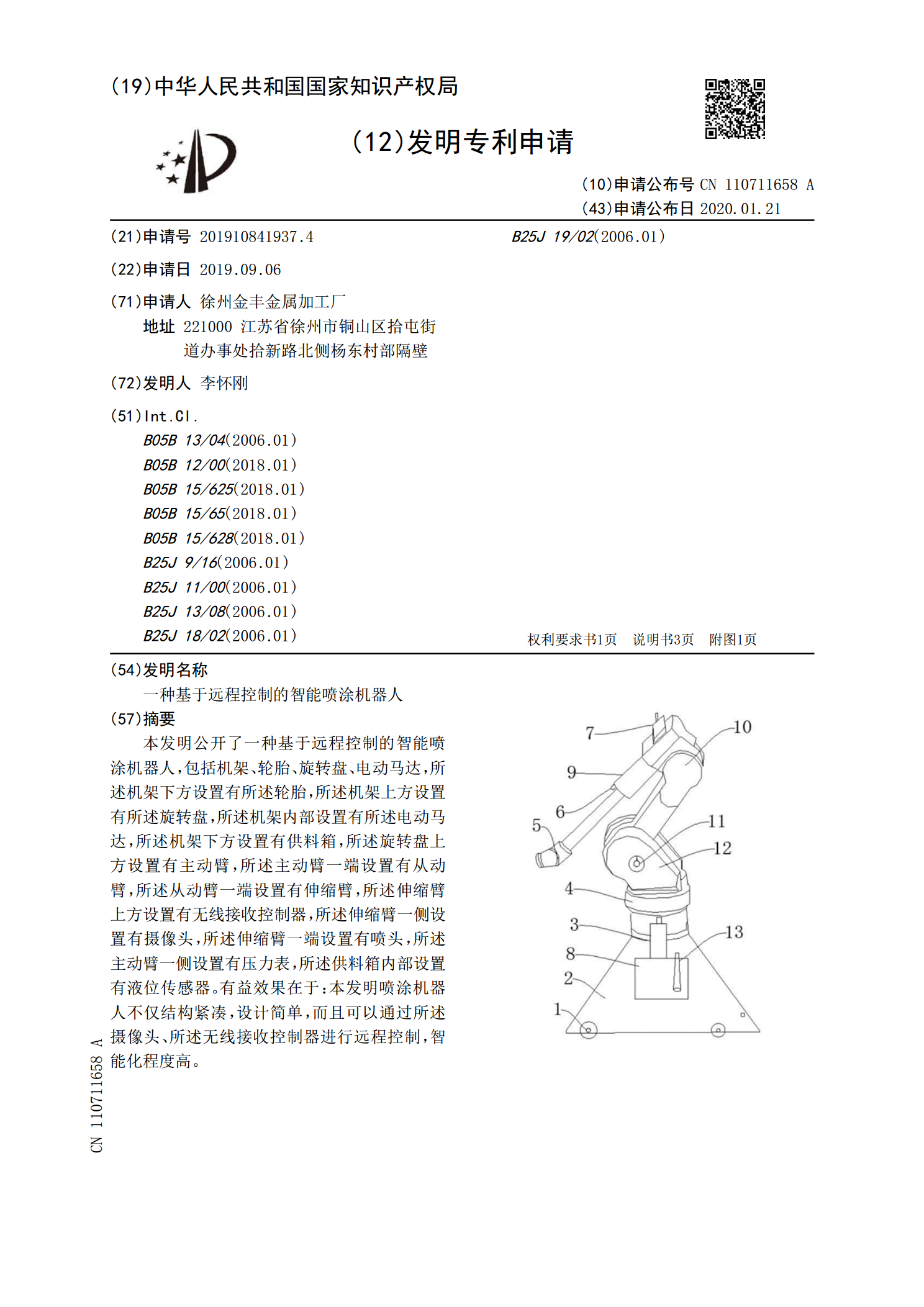
本发明公开了一种基于远程控制的智能喷涂机器人,包括机架、轮胎、旋转盘、电动马达,所述机架下方设置有所述轮胎,所述机架上方设置有所述旋转盘,所述机架内部设置有所述电动马达,所述机架下方设置有供料箱,所述旋转盘上方设置有主动臂,所述主动臂一端设置有从动臂,所述从动臂一端设置有伸缩臂,所述伸缩臂上方设置有无线接收控制器,所述伸缩臂一侧设置有摄像头,所述伸缩臂一端设置有喷头,所述主动臂一侧设置有压力表,所述供料箱内部设置有液位传感器。有益效果在于:本发明喷涂机器人不仅结构紧凑,设计简单,而且可以通过所述摄像头、所
一种基于远程智能控制的水下检查机器人.pdf
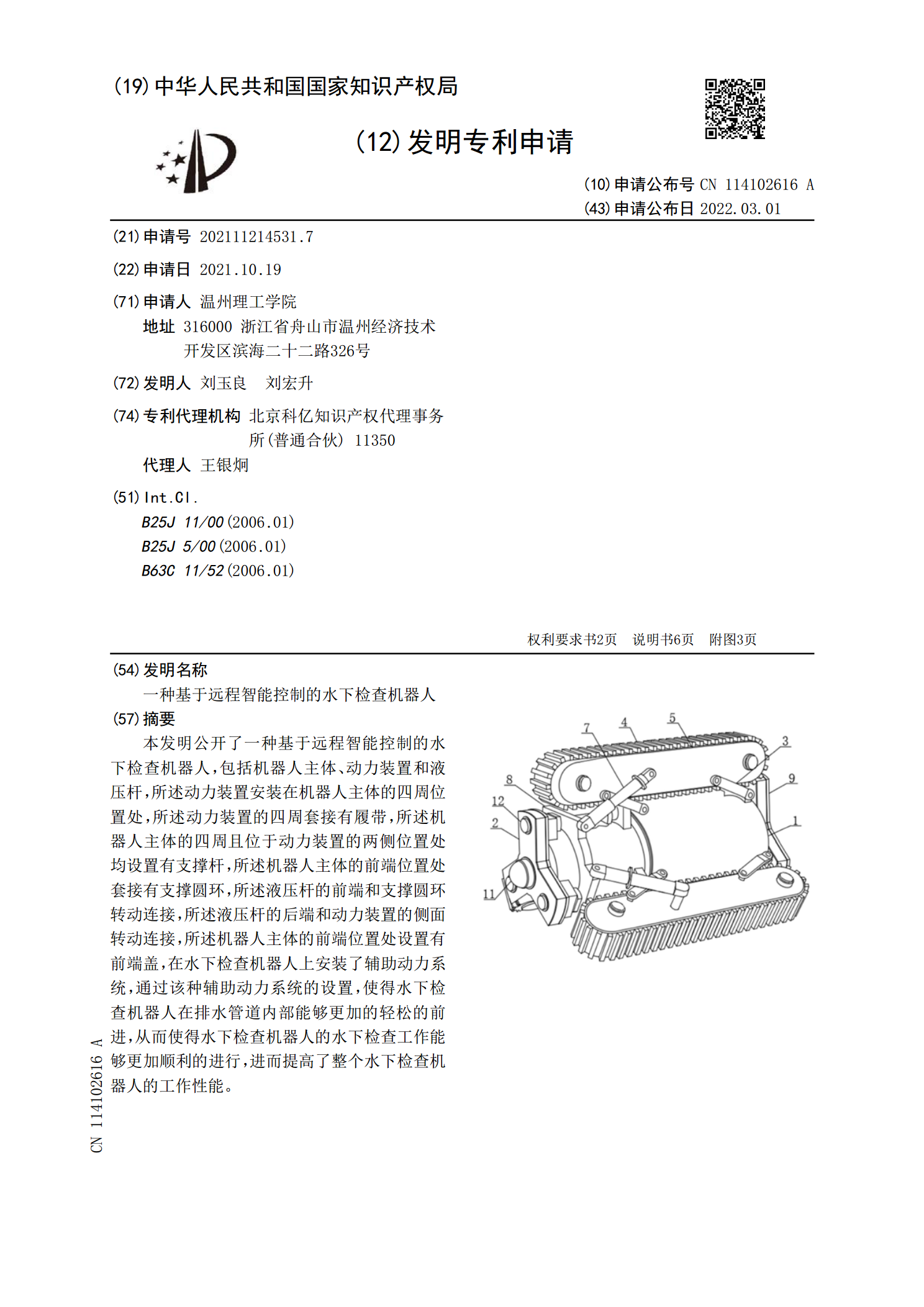
本发明公开了一种基于远程智能控制的水下检查机器人,包括机器人主体、动力装置和液压杆,所述动力装置安装在机器人主体的四周位置处,所述动力装置的四周套接有履带,所述机器人主体的四周且位于动力装置的两侧位置处均设置有支撑杆,所述机器人主体的前端位置处套接有支撑圆环,所述液压杆的前端和支撑圆环转动连接,所述液压杆的后端和动力装置的侧面转动连接,所述机器人主体的前端位置处设置有前端盖,在水下检查机器人上安装了辅助动力系统,通过该种辅助动力系统的设置,使得水下检查机器人在排水管道内部能够更加的轻松的前进,从而使得水下
一种智能喷涂机器人.pdf
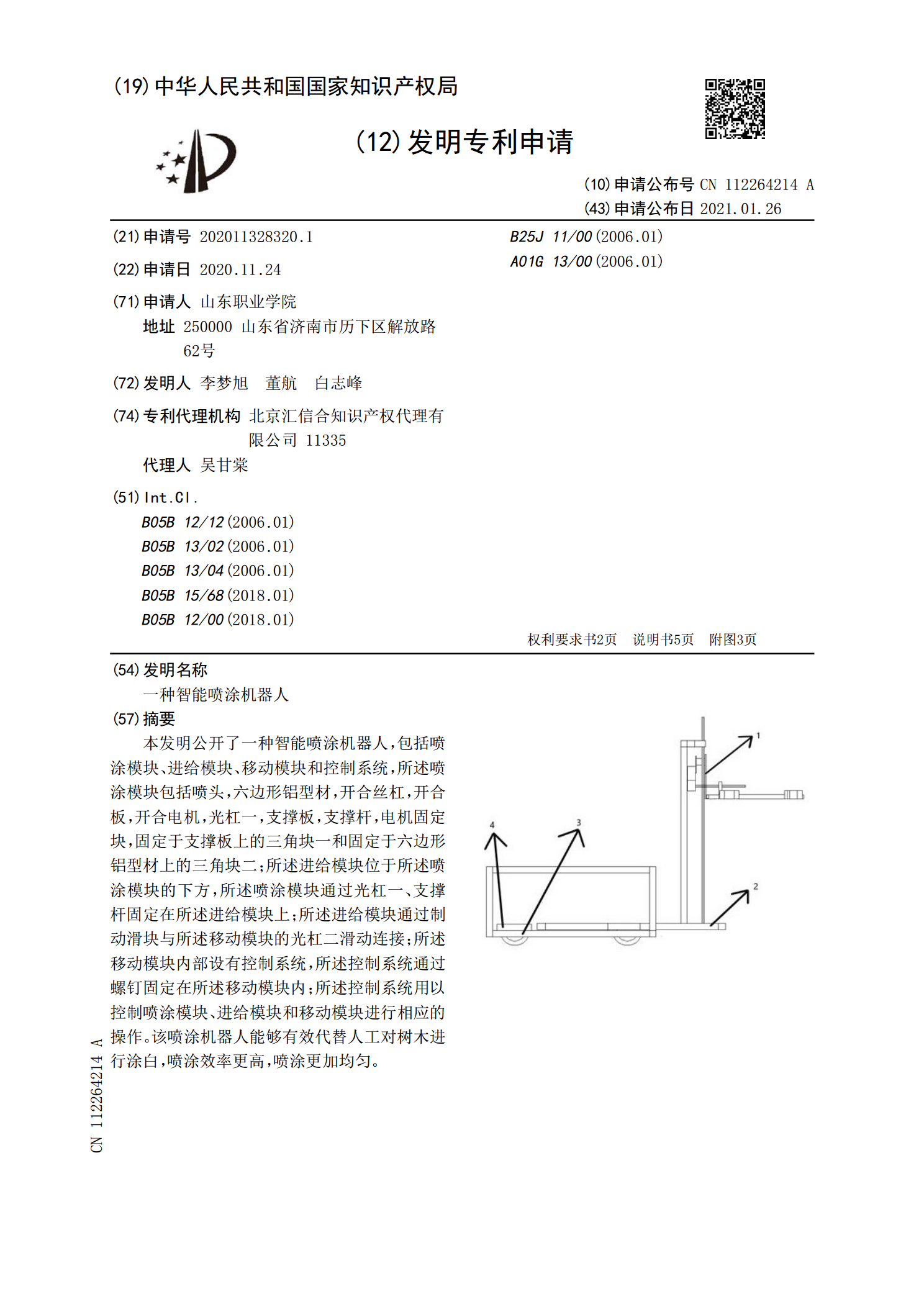
本发明公开了一种智能喷涂机器人,包括喷涂模块、进给模块、移动模块和控制系统,所述喷涂模块包括喷头,六边形铝型材,开合丝杠,开合板,开合电机,光杠一,支撑板,支撑杆,电机固定块,固定于支撑板上的三角块一和固定于六边形铝型材上的三角块二;所述进给模块位于所述喷涂模块的下方,所述喷涂模块通过光杠一、支撑杆固定在所述进给模块上;所述进给模块通过制动滑块与所述移动模块的光杠二滑动连接;所述移动模块内部设有控制系统,所述控制系统通过螺钉固定在所述移动模块内;所述控制系统用以控制喷涂模块、进给模块和移动模块进行相应的操

一种自动化控制的智能喷涂机器人.pdf
本发明涉及机器人领域,具体是一种自动化控制的智能喷涂机器人,包括支撑箱,支撑箱内部设置有支撑板,支撑板的一侧安装有滚轮,另一侧安装有齿条支撑架,齿条支撑架外侧啮合有连接齿轮;齿条支撑架上安装有连接箱,连接箱通过第二转轴与安装架连接,第二转轴上安装有第一驱动组件;安装架内部安装有清理喷涂机构;清理喷涂机构包括滑动箱,滑动箱上安装有第二驱动组件,滑动箱之间安装有第三转轴,第三转轴上安装有第三驱动组件,第三转轴上安装有连接套,连接套上依次安装有风干组件、移动喷涂组件、移动打磨组件和清洗组件,本发明可以有效地方便
一种基于远程控制的智能家居服务机器人系统.pdf
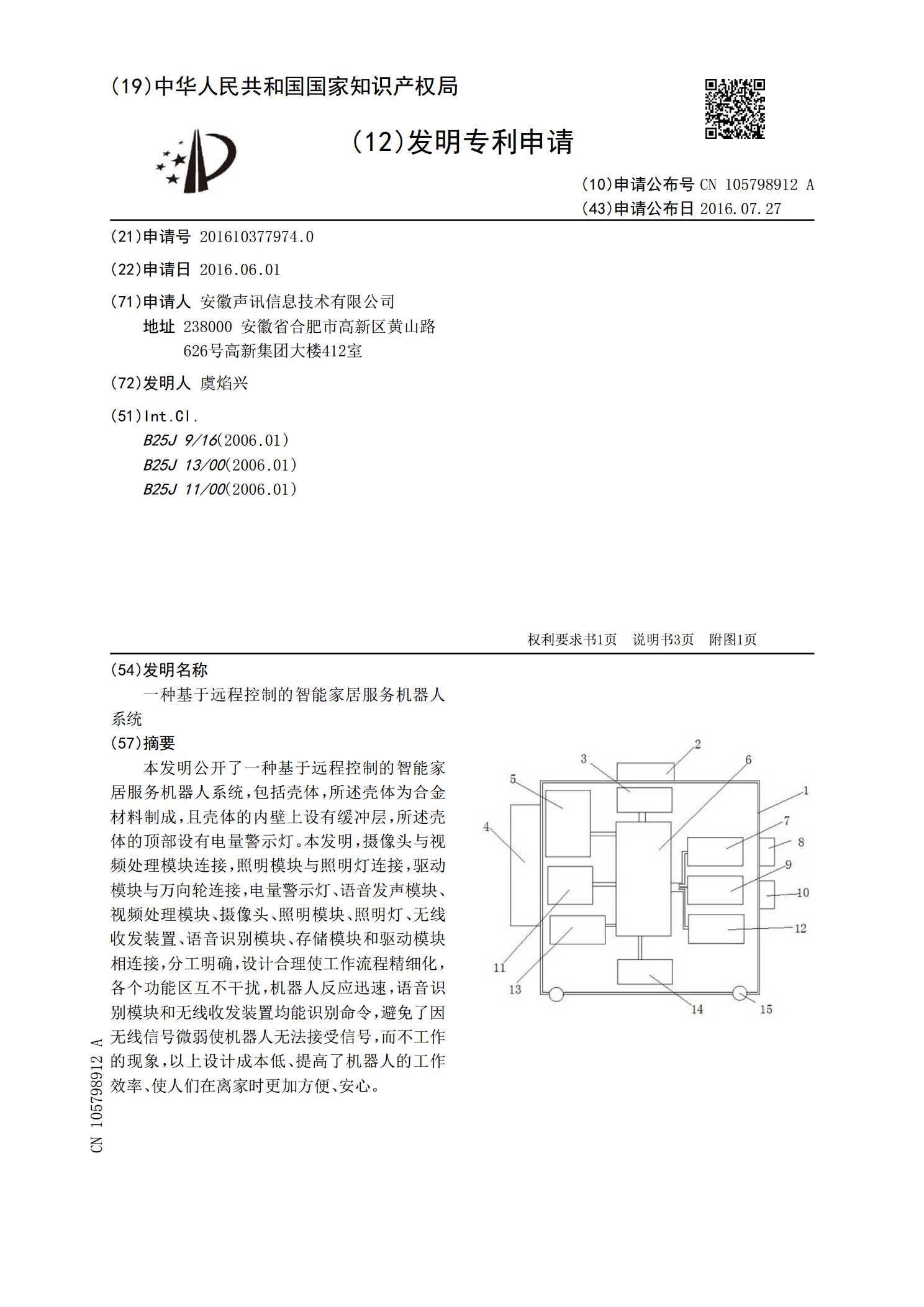
本发明公开了一种基于远程控制的智能家居服务机器人系统,包括壳体,所述壳体为合金材料制成,且壳体的内壁上设有缓冲层,所述壳体的顶部设有电量警示灯。本发明,摄像头与视频处理模块连接,照明模块与照明灯连接,驱动模块与万向轮连接,电量警示灯、语音发声模块、视频处理模块、摄像头、照明模块、照明灯、无线收发装置、语音识别模块、存储模块和驱动模块相连接,分工明确,设计合理使工作流程精细化,各个功能区互不干扰,机器人反应迅速,语音识别模块和无线收发装置均能识别命令,避免了因无线信号微弱使机器人无法接受信号,而不工作的现象