
一种基于远程智能控制的水下检查机器人.pdf

小忆****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于远程智能控制的水下检查机器人.pdf
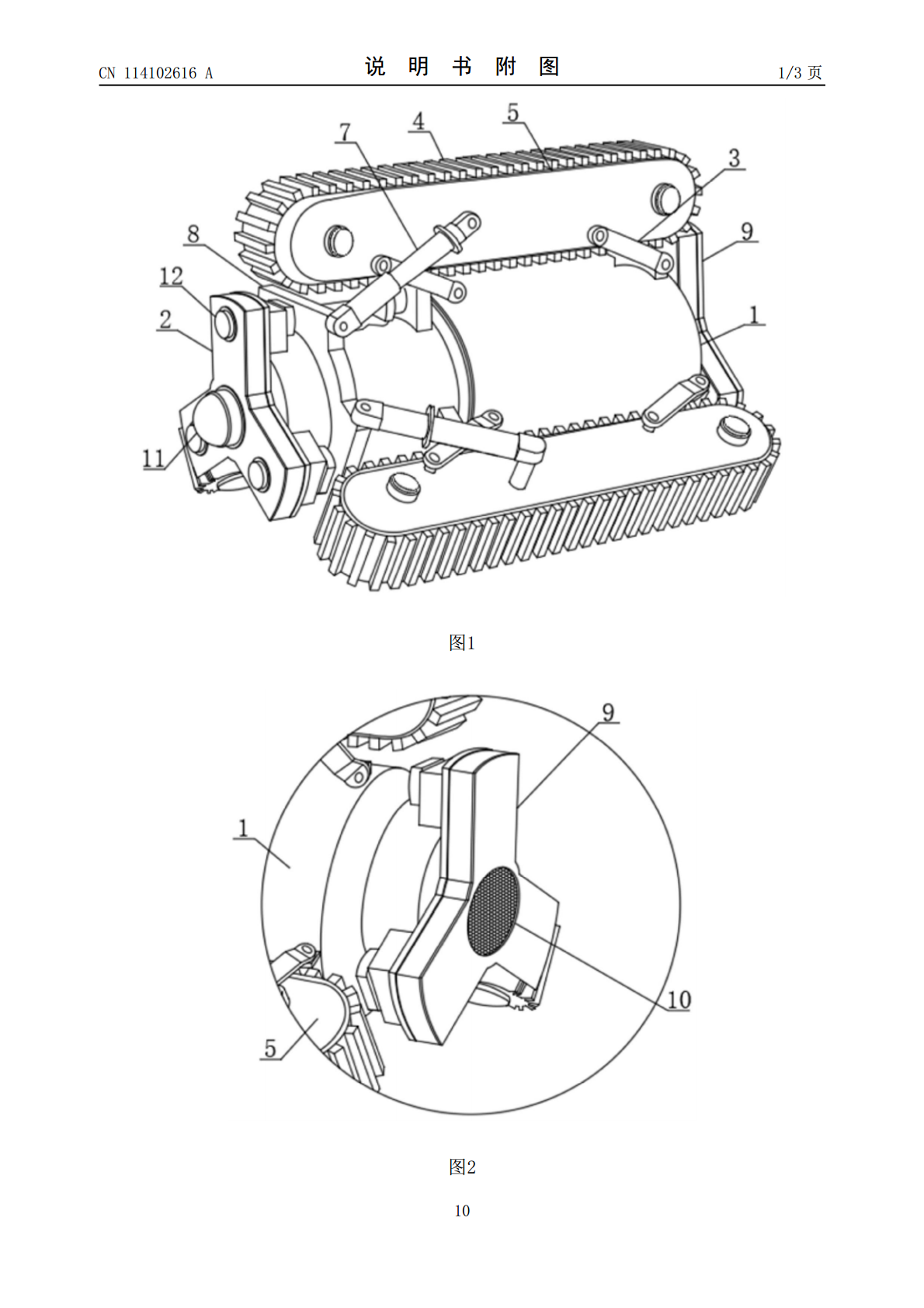
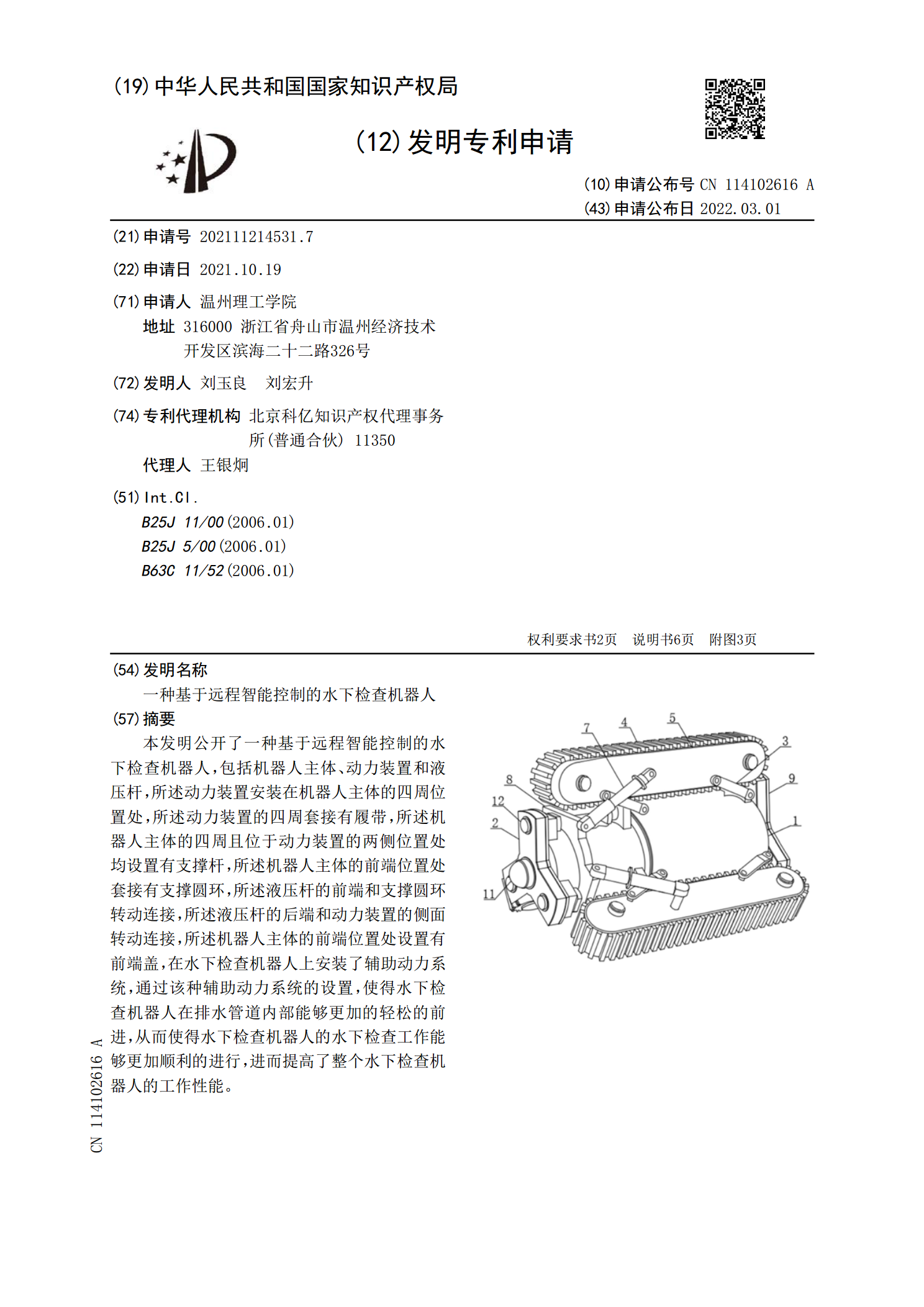
本发明公开了一种基于远程智能控制的水下检查机器人,包括机器人主体、动力装置和液压杆,所述动力装置安装在机器人主体的四周位置处,所述动力装置的四周套接有履带,所述机器人主体的四周且位于动力装置的两侧位置处均设置有支撑杆,所述机器人主体的前端位置处套接有支撑圆环,所述液压杆的前端和支撑圆环转动连接,所述液压杆的后端和动力装置的侧面转动连接,所述机器人主体的前端位置处设置有前端盖,在水下检查机器人上安装了辅助动力系统,通过该种辅助动力系统的设置,使得水下检查机器人在排水管道内部能够更加的轻松的前进,从而使得水下
基于智能控制的水下机器人技术.pdf
基于智能控制的水下机器人技术水下机器人是一种使用在水下环境中的机器人。它能够在海洋中寻找和提取矿物,监测海洋环境,协助进行科学研究,甚至探测水下物体。水下机器人的发展是水下探测技术的一个重要分支,其中智能控制技术的应用在控制和制造水下机器人方面有着重要的意义。智能控制技术是指采用各种智能技术和控制方法来处理复杂的、不确定的和非线性的控制问题,以达到良好的控制效果。在水下机器人的应用中,智能控制技术可以用于控制水下机器人的姿态和动力系统,提高操作的精确性和成本效益,提升水下机器人的整体运行效率。目前,国内外
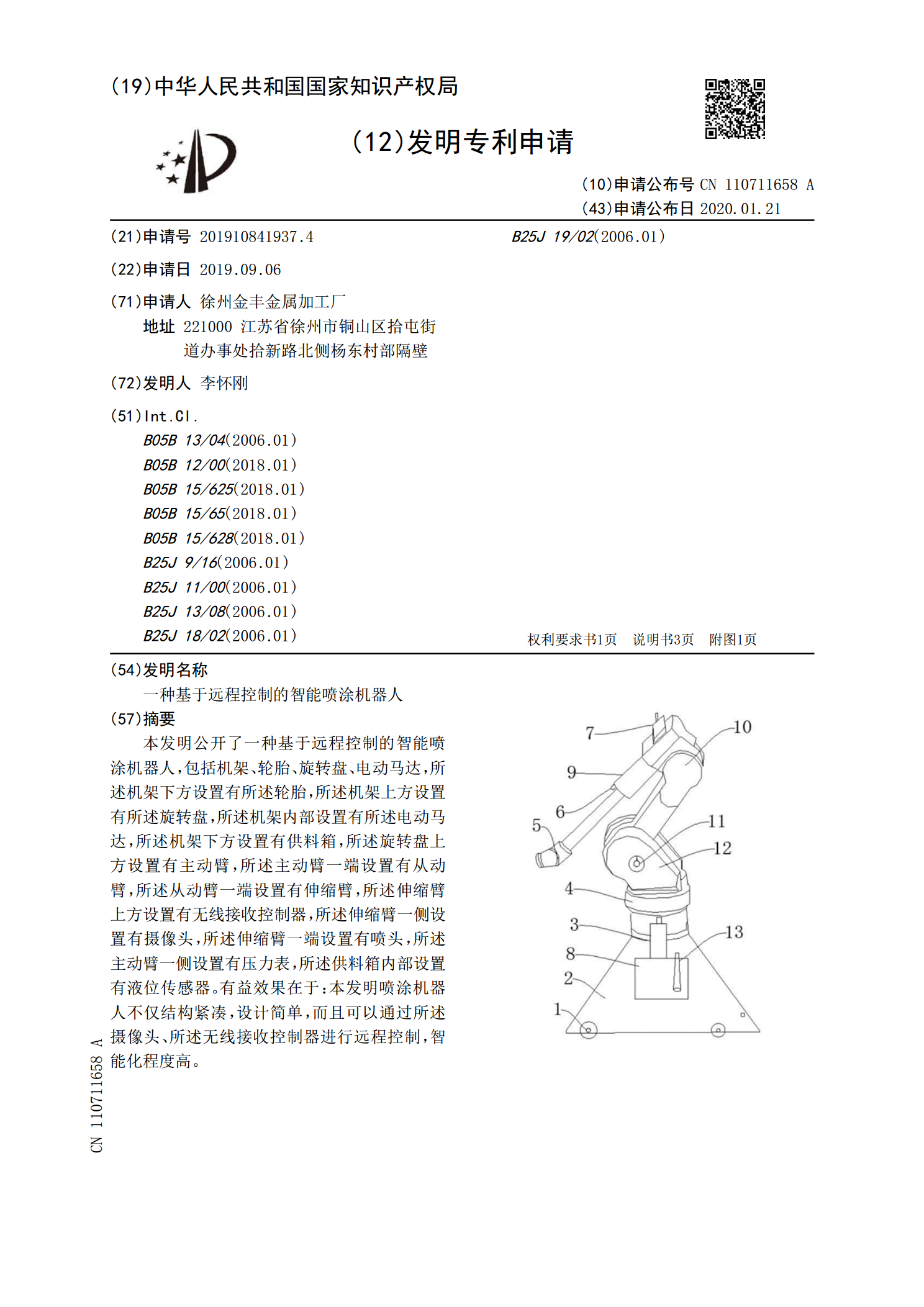
一种基于远程控制的智能喷涂机器人.pdf
本发明公开了一种基于远程控制的智能喷涂机器人,包括机架、轮胎、旋转盘、电动马达,所述机架下方设置有所述轮胎,所述机架上方设置有所述旋转盘,所述机架内部设置有所述电动马达,所述机架下方设置有供料箱,所述旋转盘上方设置有主动臂,所述主动臂一端设置有从动臂,所述从动臂一端设置有伸缩臂,所述伸缩臂上方设置有无线接收控制器,所述伸缩臂一侧设置有摄像头,所述伸缩臂一端设置有喷头,所述主动臂一侧设置有压力表,所述供料箱内部设置有液位传感器。有益效果在于:本发明喷涂机器人不仅结构紧凑,设计简单,而且可以通过所述摄像头、所
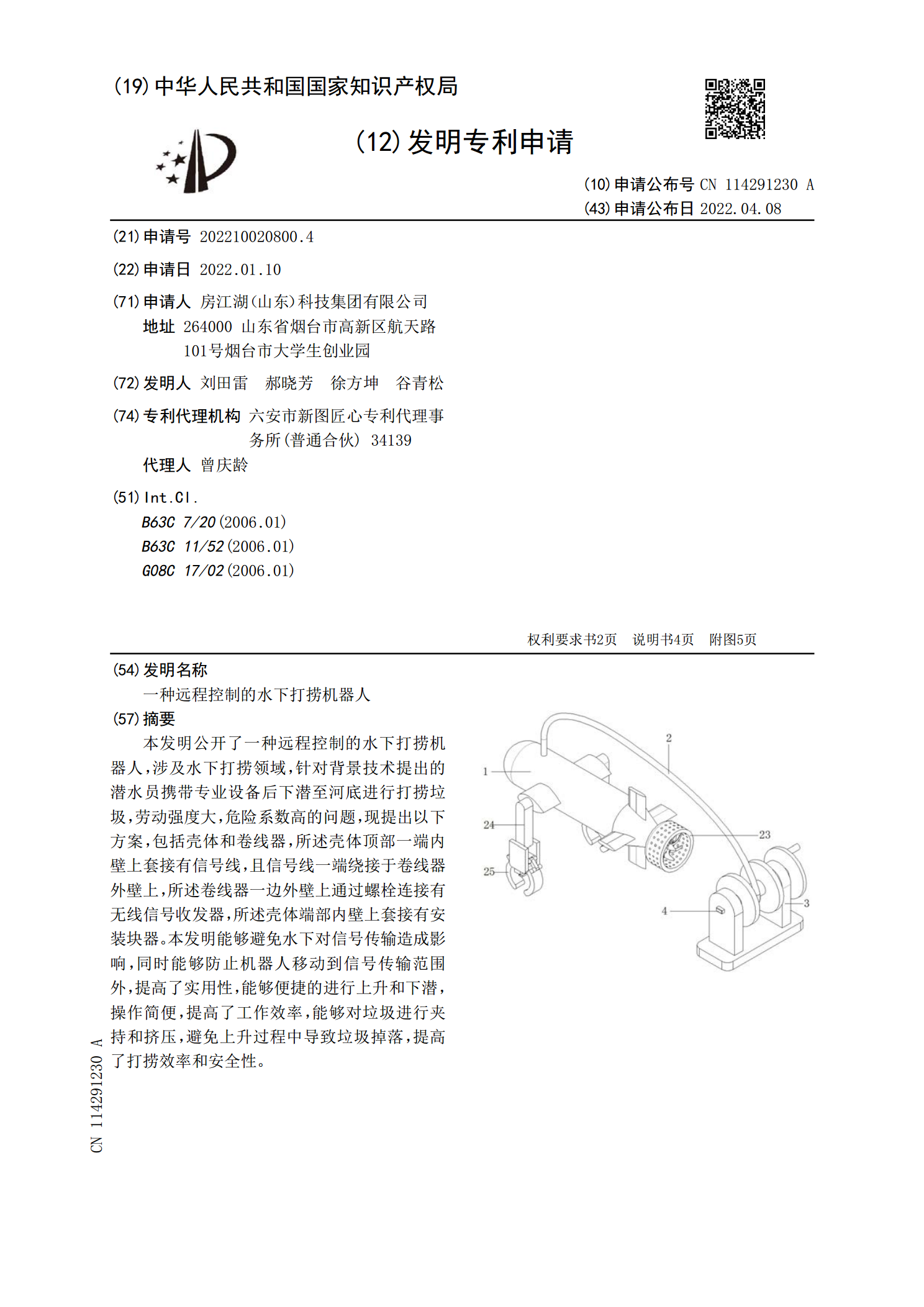
一种远程控制的水下打捞机器人.pdf
本发明公开了一种远程控制的水下打捞机器人,涉及水下打捞领域,针对背景技术提出的潜水员携带专业设备后下潜至河底进行打捞垃圾,劳动强度大,危险系数高的问题,现提出以下方案,包括壳体和卷线器,所述壳体顶部一端内壁上套接有信号线,且信号线一端绕接于卷线器外壁上,所述卷线器一边外壁上通过螺栓连接有无线信号收发器,所述壳体端部内壁上套接有安装块器。本发明能够避免水下对信号传输造成影响,同时能够防止机器人移动到信号传输范围外,提高了实用性,能够便捷的进行上升和下潜,操作简便,提高了工作效率,能够对垃圾进行夹持和挤压,避
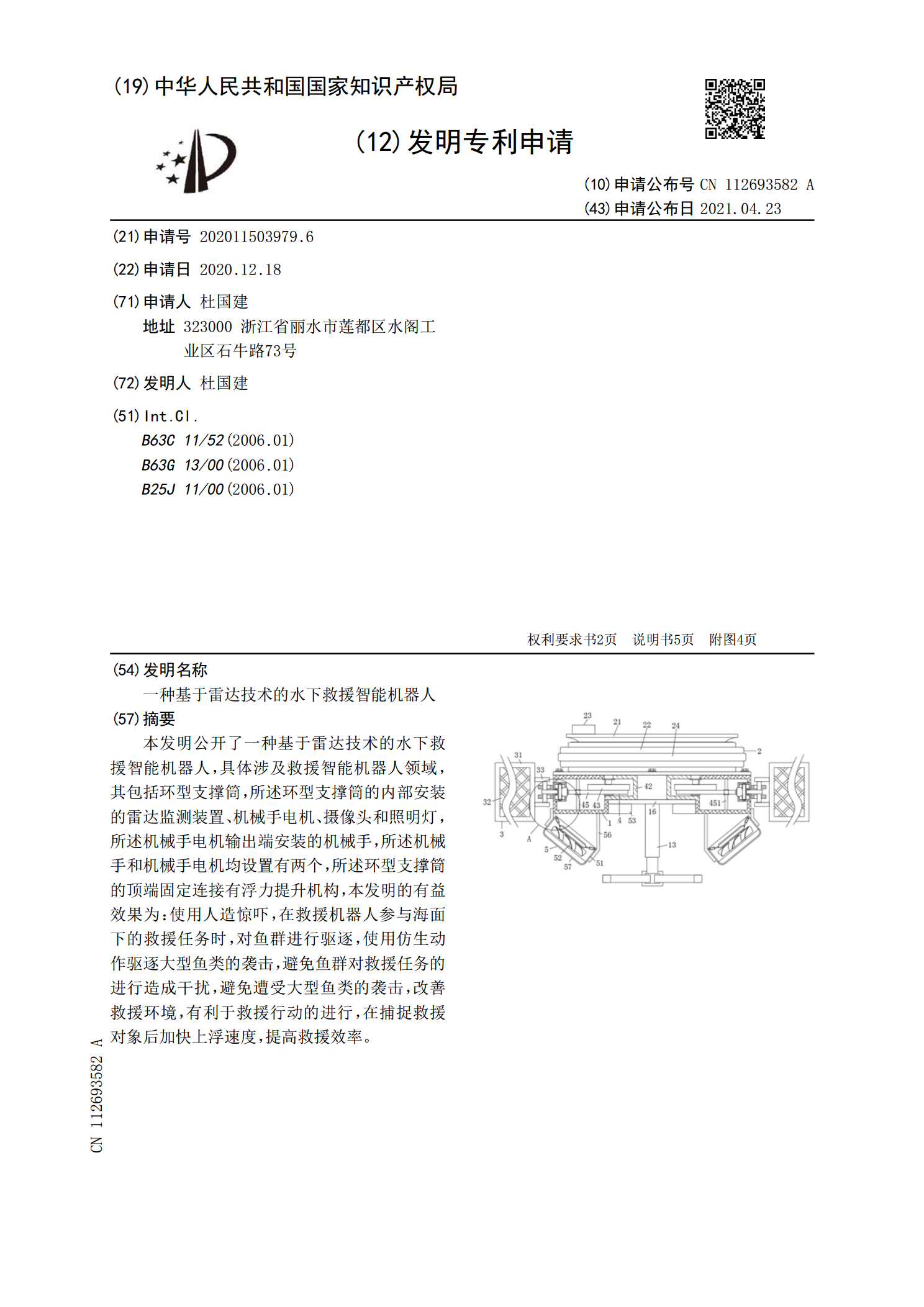
一种基于雷达技术的水下救援智能机器人.pdf
本发明公开了一种基于雷达技术的水下救援智能机器人,具体涉及救援智能机器人领域,其包括环型支撑筒,所述环型支撑筒的内部安装的雷达监测装置、机械手电机、摄像头和照明灯,所述机械手电机输出端安装的机械手,所述机械手和机械手电机均设置有两个,所述环型支撑筒的顶端固定连接有浮力提升机构,本发明的有益效果为:使用人造惊吓,在救援机器人参与海面下的救援任务时,对鱼群进行驱逐,使用仿生动作驱逐大型鱼类的袭击,避免鱼群对救援任务的进行造成干扰,避免遭受大型鱼类的袭击,改善救援环境,有利于救援行动的进行,在捕捉救援对象后加快