
一种车辆防侧翻控制系统和防侧翻控制方法.pdf

fa****楠吖

1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆防侧翻控制系统和防侧翻控制方法.pdf
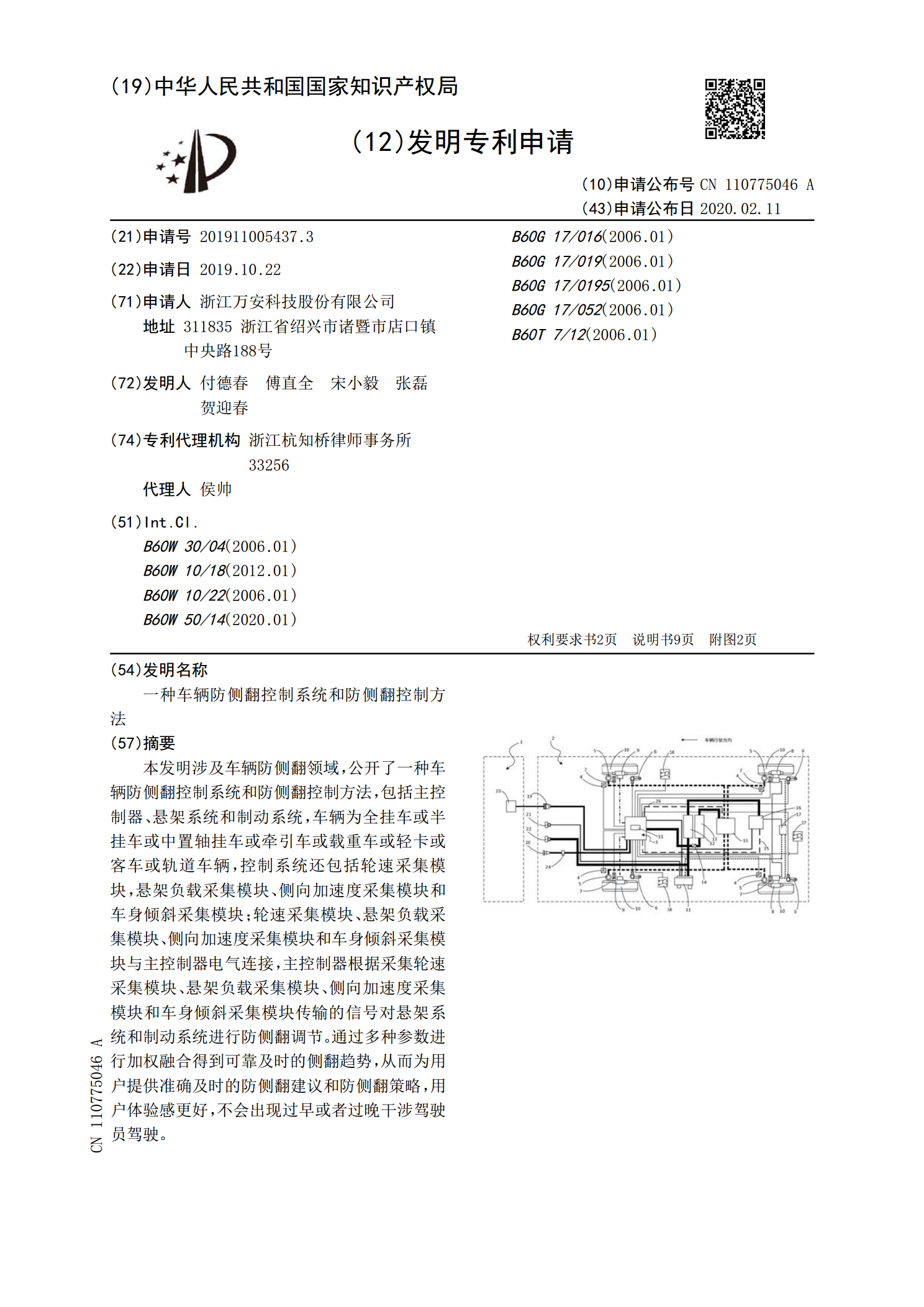
本发明涉及车辆防侧翻领域,公开了一种车辆防侧翻控制系统和防侧翻控制方法,包括主控制器、悬架系统和制动系统,车辆为全挂车或半挂车或中置轴挂车或牵引车或载重车或轻卡或客车或轨道车辆,控制系统还包括轮速采集模块,悬架负载采集模块、侧向加速度采集模块和车身倾斜采集模块;轮速采集模块、悬架负载采集模块、侧向加速度采集模块和车身倾斜采集模块与主控制器电气连接,主控制器根据采集轮速采集模块、悬架负载采集模块、侧向加速度采集模块和车身倾斜采集模块传输的信号对悬架系统和制动系统进行防侧翻调节。通过多种参数进行加权融合得到可
一种车辆防侧翻控制装置.pdf
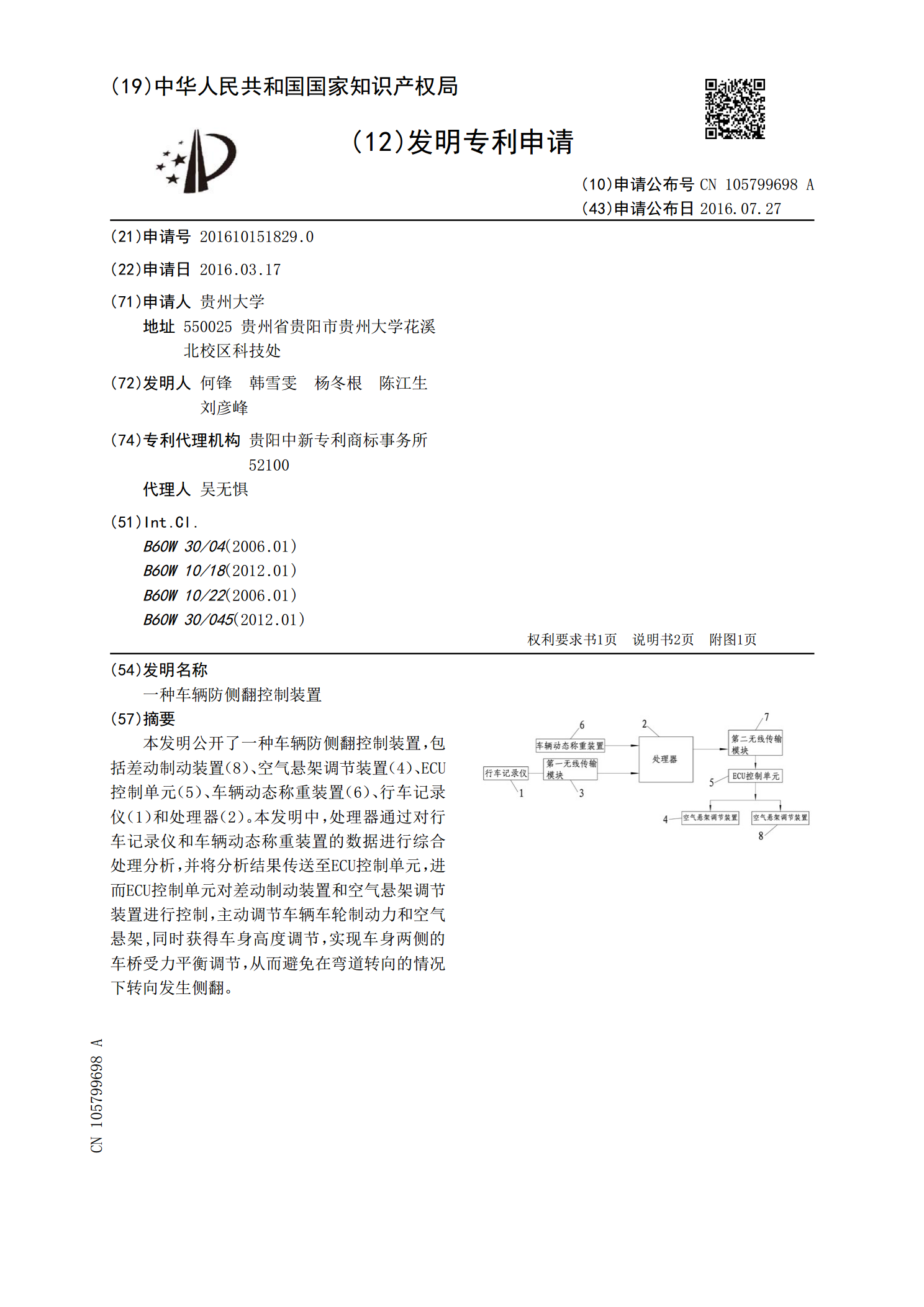
本发明公开了一种车辆防侧翻控制装置,包括差动制动装置(8)、空气悬架调节装置(4)、ECU控制单元(5)、车辆动态称重装置(6)、行车记录仪(1)和处理器(2)。本发明中,处理器通过对行车记录仪和车辆动态称重装置的数据进行综合处理分析,并将分析结果传送至ECU控制单元,进而ECU控制单元对差动制动装置和空气悬架调节装置进行控制,主动调节车辆车轮制动力和空气悬架,同时获得车身高度调节,实现车身两侧的车桥受力平衡调节,从而避免在弯道转向的情况下转向发生侧翻。

车辆多功能侧翻判定系统及自动防侧翻装置.pdf
本发明公开了一种车辆多功能侧翻判定系统及自动防侧翻装置,属于车辆领域。所述系统包括至少两个位移传感器,与所述位移传感器分别相连的ECU,以及与所述ECU相连的输出装置,所述位移传感器按照两个为一组的规律分布,至少有一组所述位移传感器对称的设置在所述车辆车架与车辆车桥之间。所述装置包括所述车辆多功能侧翻判定系统和与其相连的执行机构,所述执行机构至少包括设于所述车辆车架上且对称的左侧执行机构和右侧执行机构,所述左侧执行机构和所述右侧执行机构均包括一个伸缩轴,以及设于所述伸缩轴外侧的支撑轮。本发明可防止在任何情

铁道车辆防侧翻装置.pdf
本发明涉及一种铁道车辆防侧翻装置,防止车辆钢轮脱离铁轨。该车辆防侧翻装置包括勾体(1)、平面滑动轴承(2)、活动销轴(3)、固定销轴(4)和底座(5)。底座(5)固定在车辆车体或钢轮连接支架上,勾体(1)一端通过固定销轴(4)与底座(5)转动连接,勾体(1)中部通过活动销轴(3)与底座(5)一端连接,活动销轴(3)与底座(5)连接孔间隙配合,勾体(1)的自由端位于钢轨轨道下侧面的下侧;勾体的勾槽内装有平面滑动轴承(2),车辆侧翻时,平面滑动轴承(2)与钢轨侧面接触。

新型防侧翻特种车辆.pdf
本发明属于车辆技术领域,特别涉及一种新型防侧翻特种车辆;其一种新型防侧翻特种车辆,包括车身,所述车身顶部和车身底部均沿所述车身的长度方向间隔设有至少两车轴支架组件;各所述车轴支架组件均包括车底连杆、两舵机、两交叉连杆以及车轴连杆,所述车底连杆安装在所述车身上。本发明提供一种新的新型防侧翻特种车辆,该新型防侧翻特种车辆在车身顶部和底部均设置多组车轴支架组件和车轮,使得车辆在发生侧翻时,分别通过舵机控制交叉连杆变形,原来车的侧面变成车体继续前进,并且,在发生侧翻后,通过各车轴支架组件的运动,可以使得车辆复位;