
一种搬运工业机器人.pdf

努力****承悦

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种工业搬运机器人.pdf
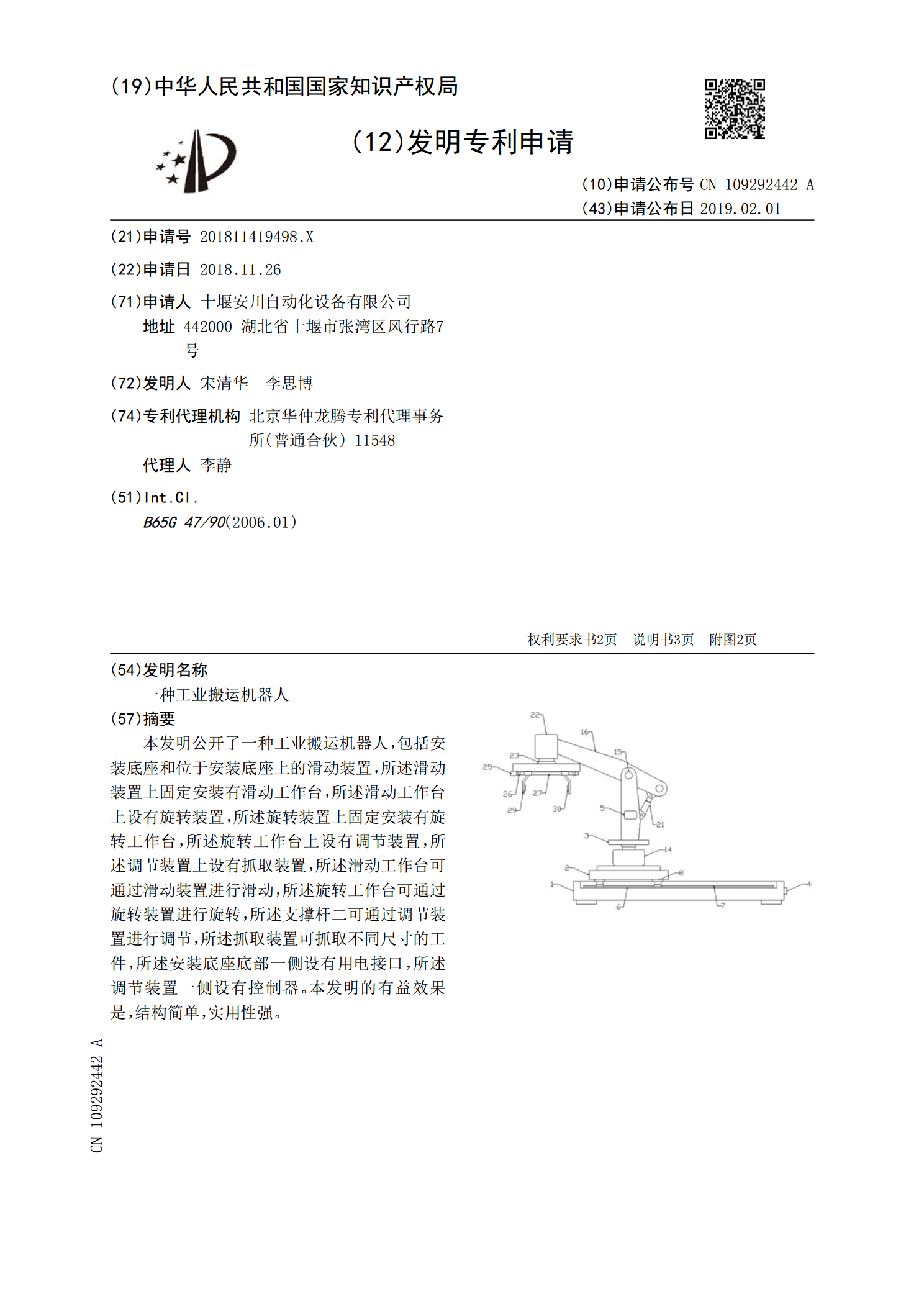
本发明公开了一种工业搬运机器人,包括安装底座和位于安装底座上的滑动装置,所述滑动装置上固定安装有滑动工作台,所述滑动工作台上设有旋转装置,所述旋转装置上固定安装有旋转工作台,所述旋转工作台上设有调节装置,所述调节装置上设有抓取装置,所述滑动工作台可通过滑动装置进行滑动,所述旋转工作台可通过旋转装置进行旋转,所述支撑杆二可通过调节装置进行调节,所述抓取装置可抓取不同尺寸的工件,所述安装底座底部一侧设有用电接口,所述调节装置一侧设有控制器。本发明的有益效果是,结构简单,实用性强。
一种工业搬运机器人.pdf
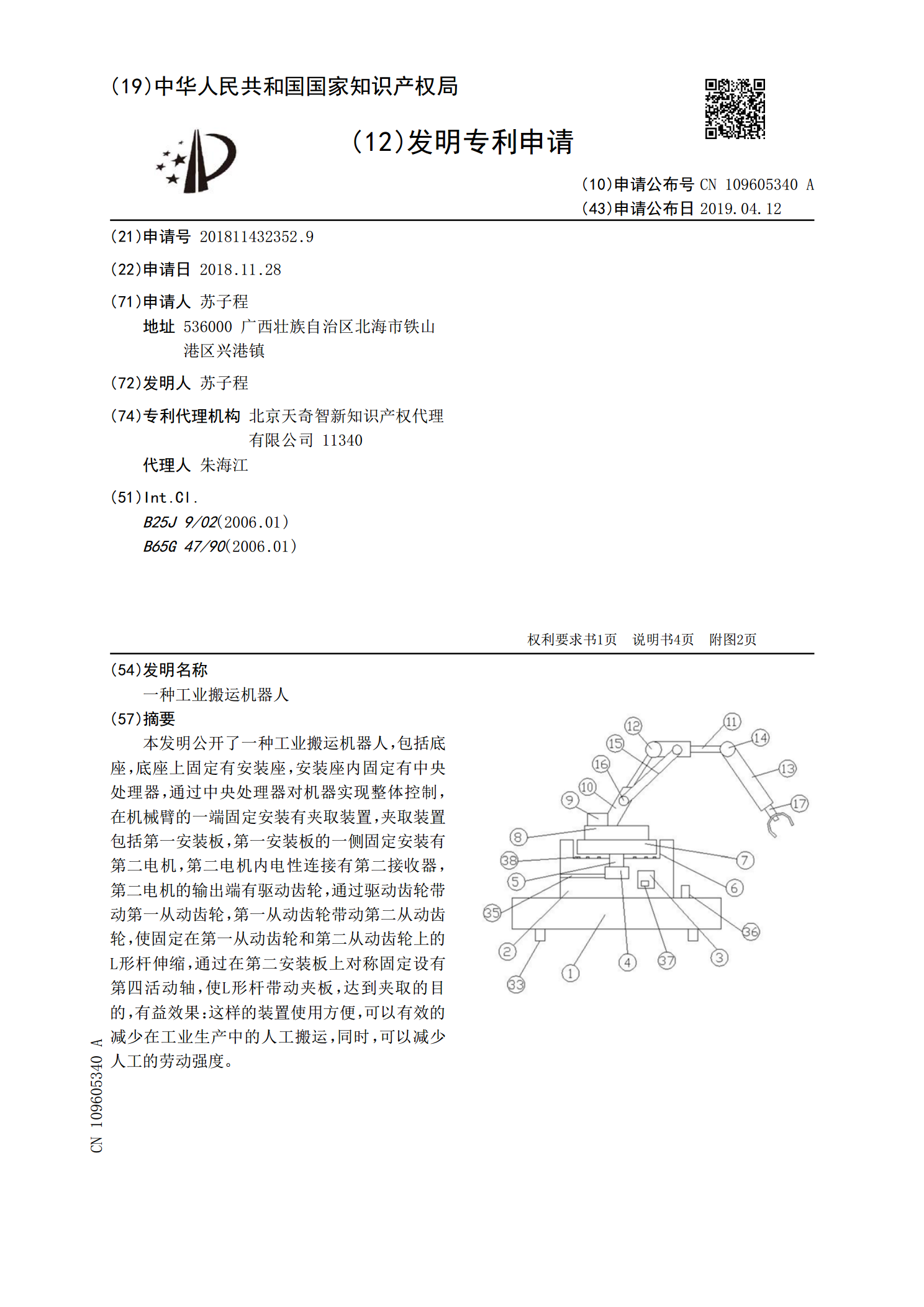
本发明公开了一种工业搬运机器人,包括底座,底座上固定有安装座,安装座内固定有中央处理器,通过中央处理器对机器实现整体控制,在机械臂的一端固定安装有夹取装置,夹取装置包括第一安装板,第一安装板的一侧固定安装有第二电机,第二电机内电性连接有第二接收器,第二电机的输出端有驱动齿轮,通过驱动齿轮带动第一从动齿轮,第一从动齿轮带动第二从动齿轮,使固定在第一从动齿轮和第二从动齿轮上的L形杆伸缩,通过在第二安装板上对称固定设有第四活动轴,使L形杆带动夹板,达到夹取的目的,有益效果:这样的装置使用方便,可以有效的减少在工
一种搬运工业机器人.pdf
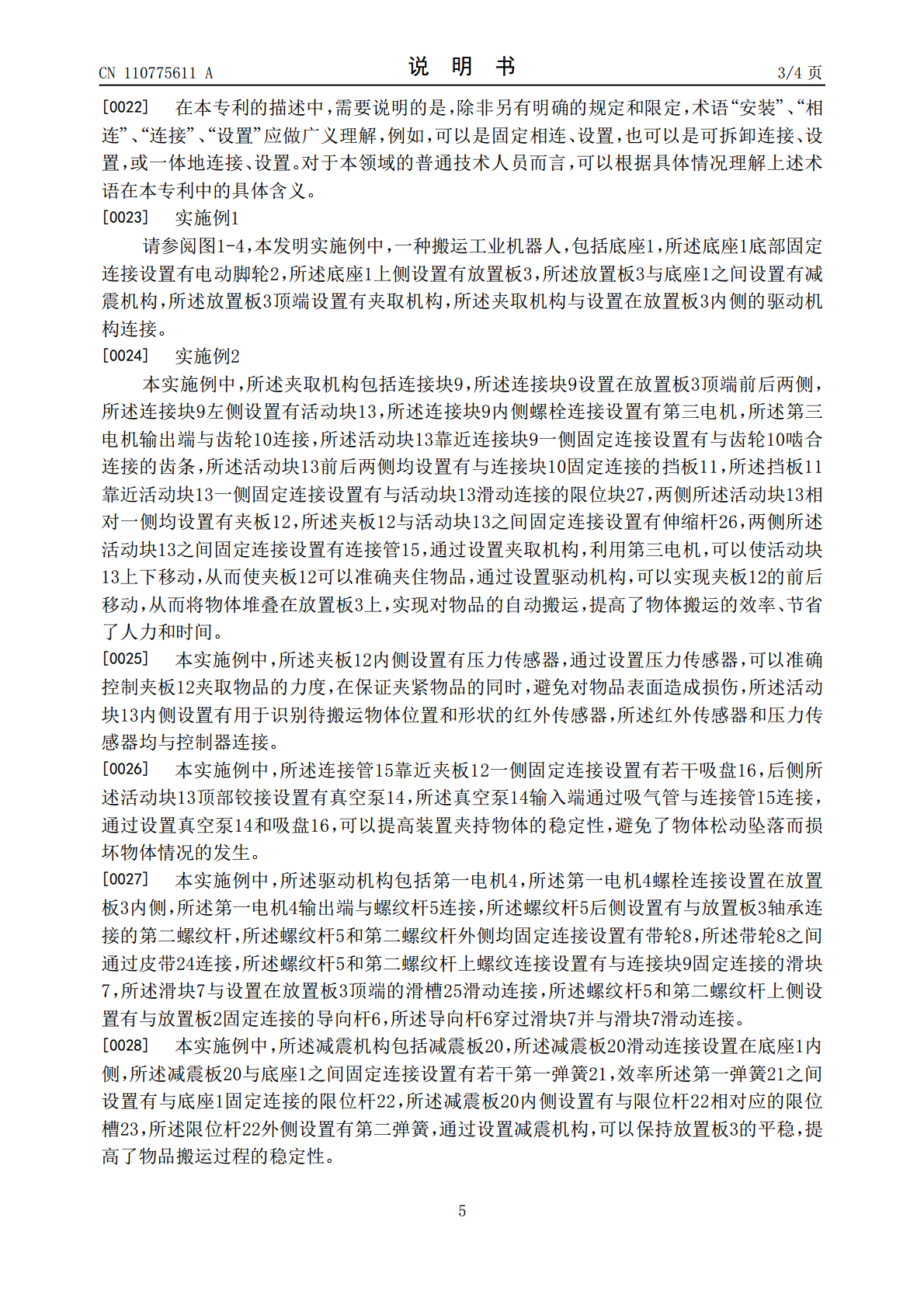
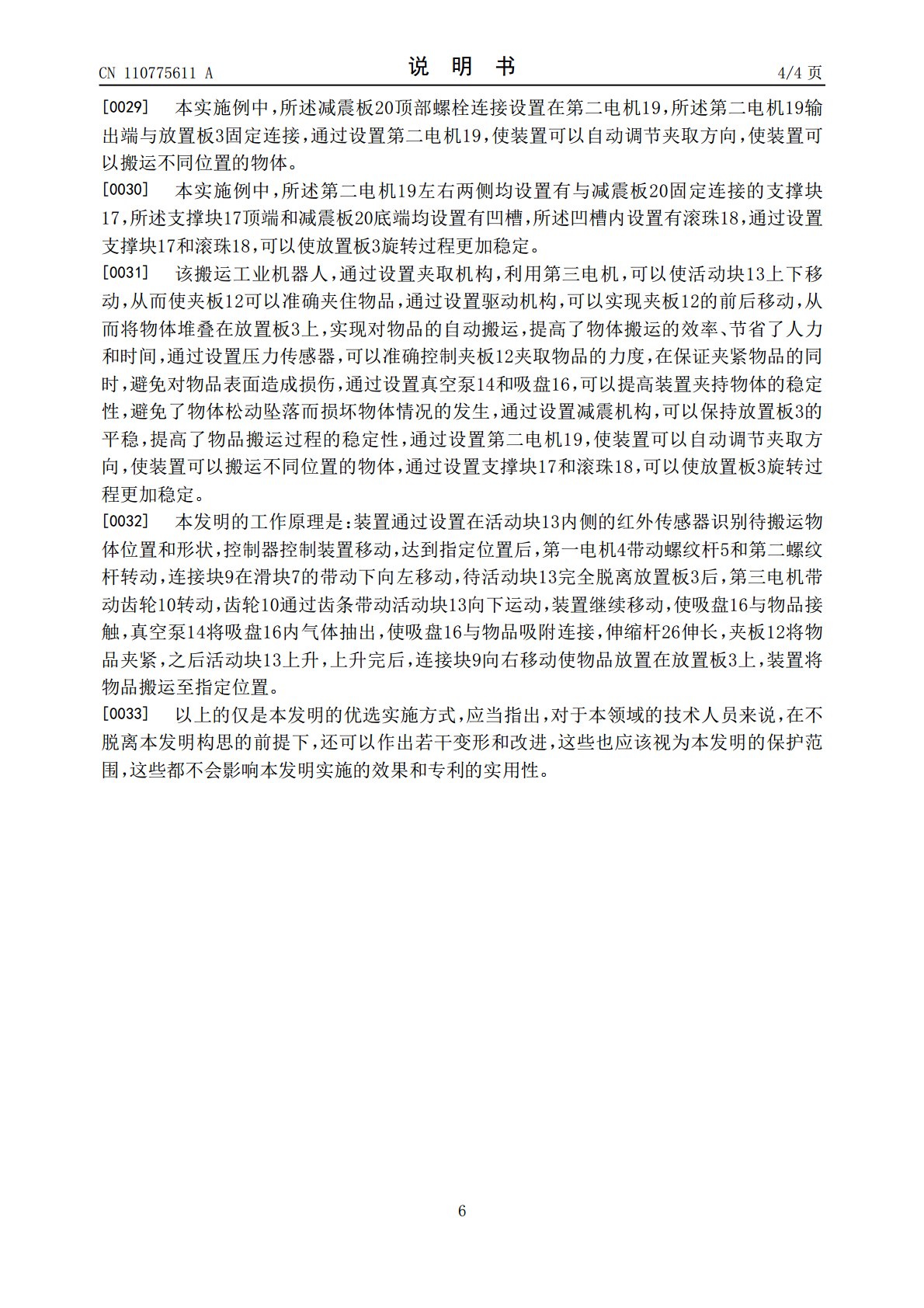
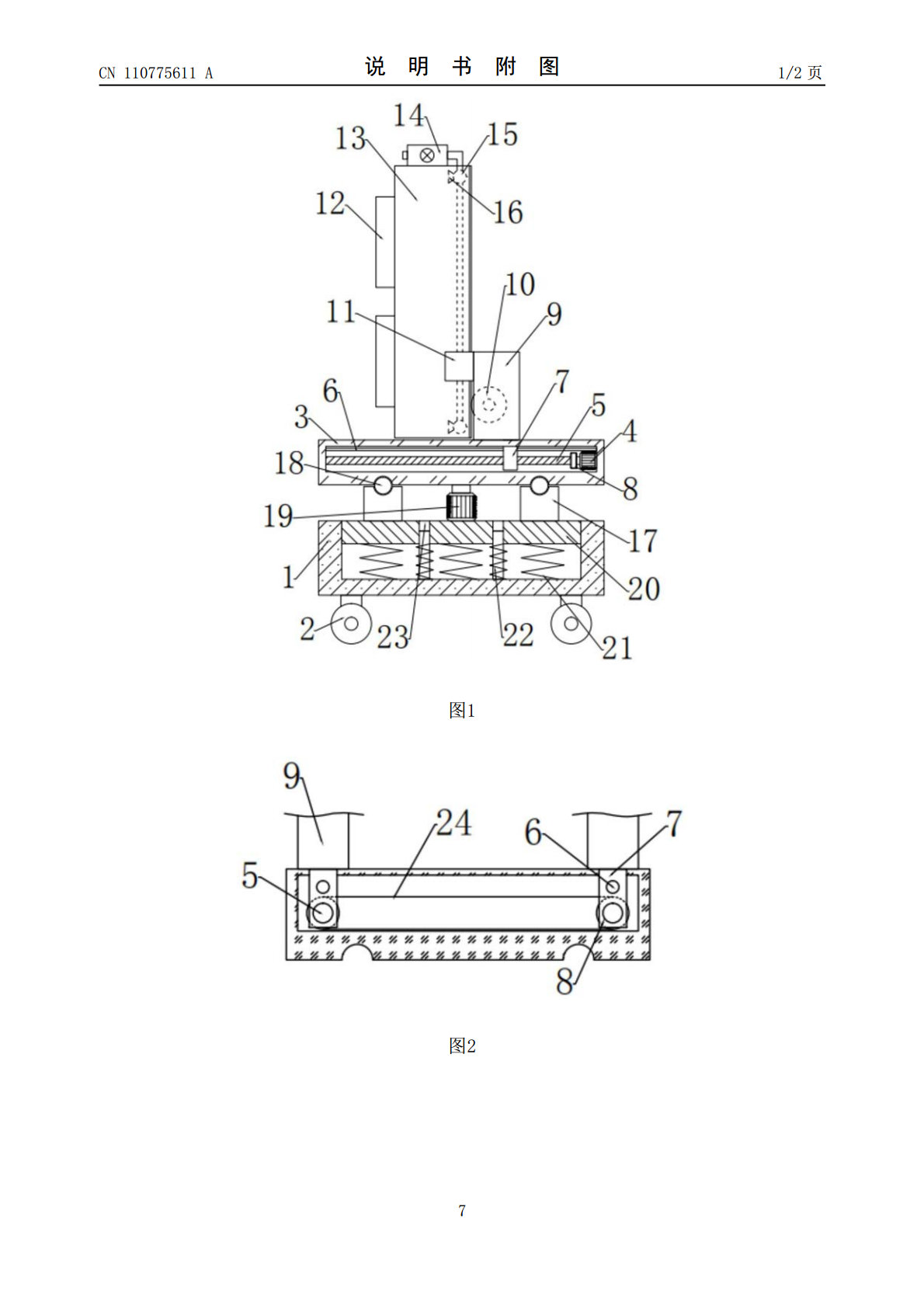
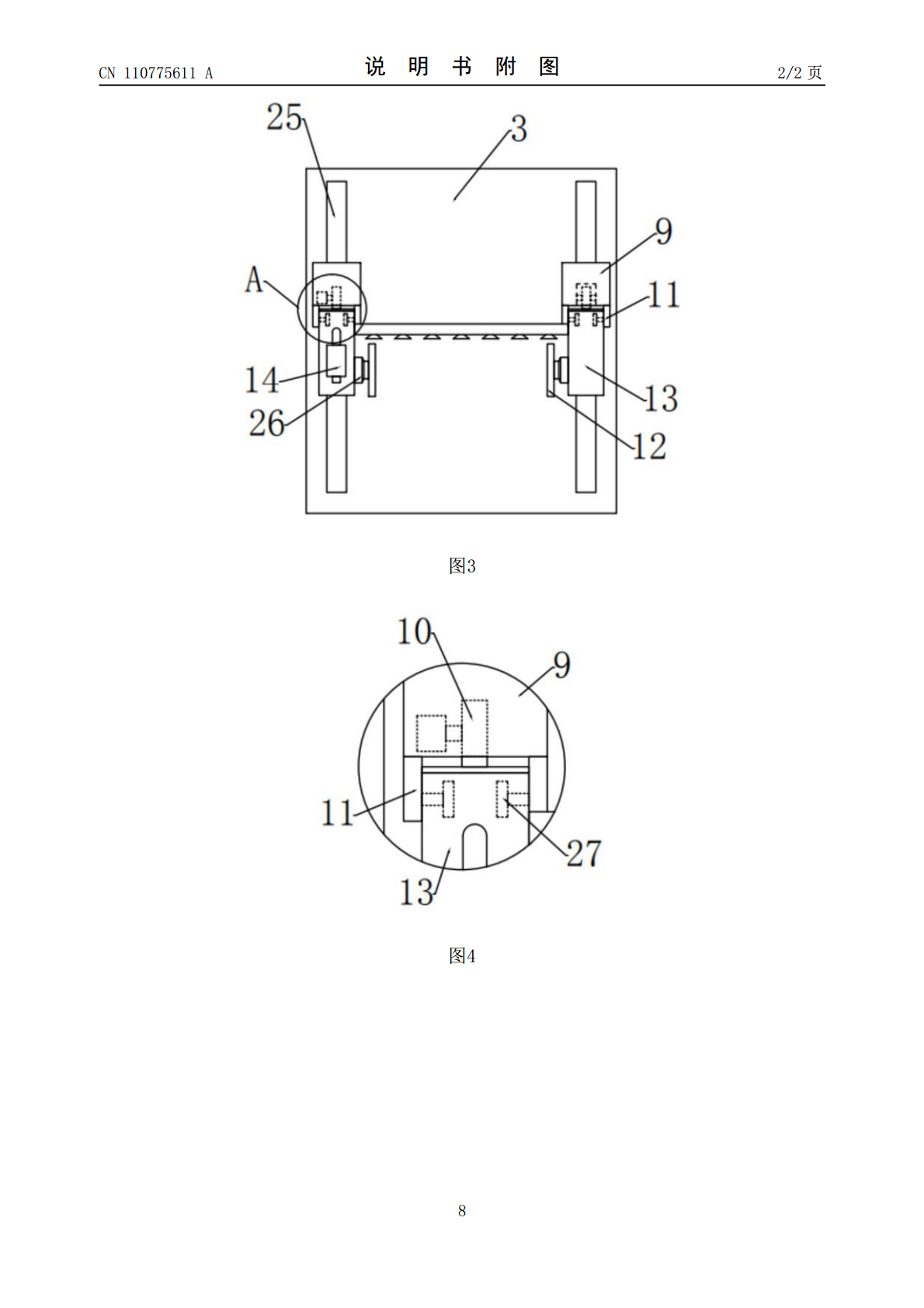
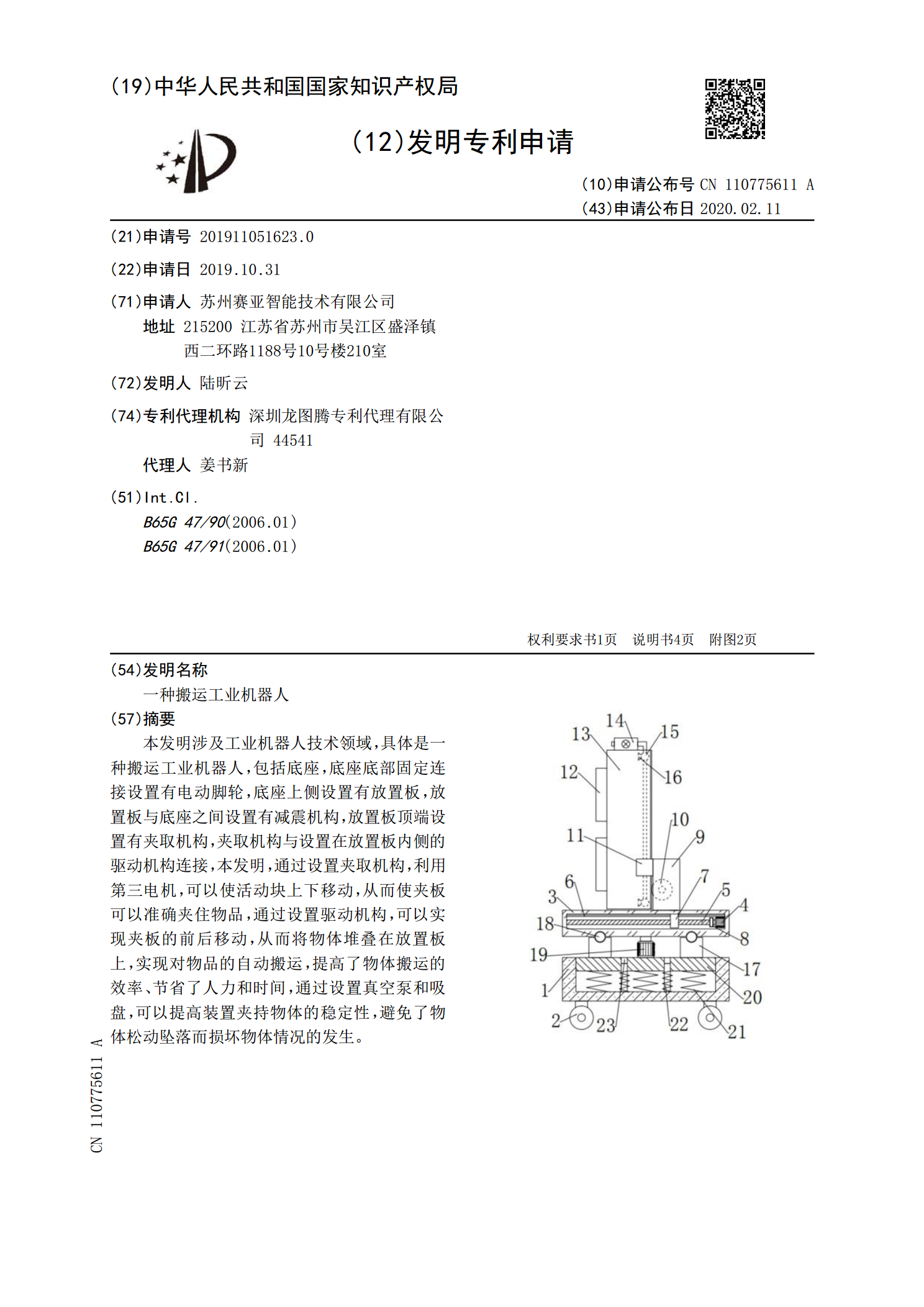
本发明涉及工业机器人技术领域,具体是一种搬运工业机器人,包括底座,底座底部固定连接设置有电动脚轮,底座上侧设置有放置板,放置板与底座之间设置有减震机构,放置板顶端设置有夹取机构,夹取机构与设置在放置板内侧的驱动机构连接,本发明,通过设置夹取机构,利用第三电机,可以使活动块上下移动,从而使夹板可以准确夹住物品,通过设置驱动机构,可以实现夹板的前后移动,从而将物体堆叠在放置板上,实现对物品的自动搬运,提高了物体搬运的效率、节省了人力和时间,通过设置真空泵和吸盘,可以提高装置夹持物体的稳定性,避免了物体松动坠落
一种工业用搬运机器人.pdf
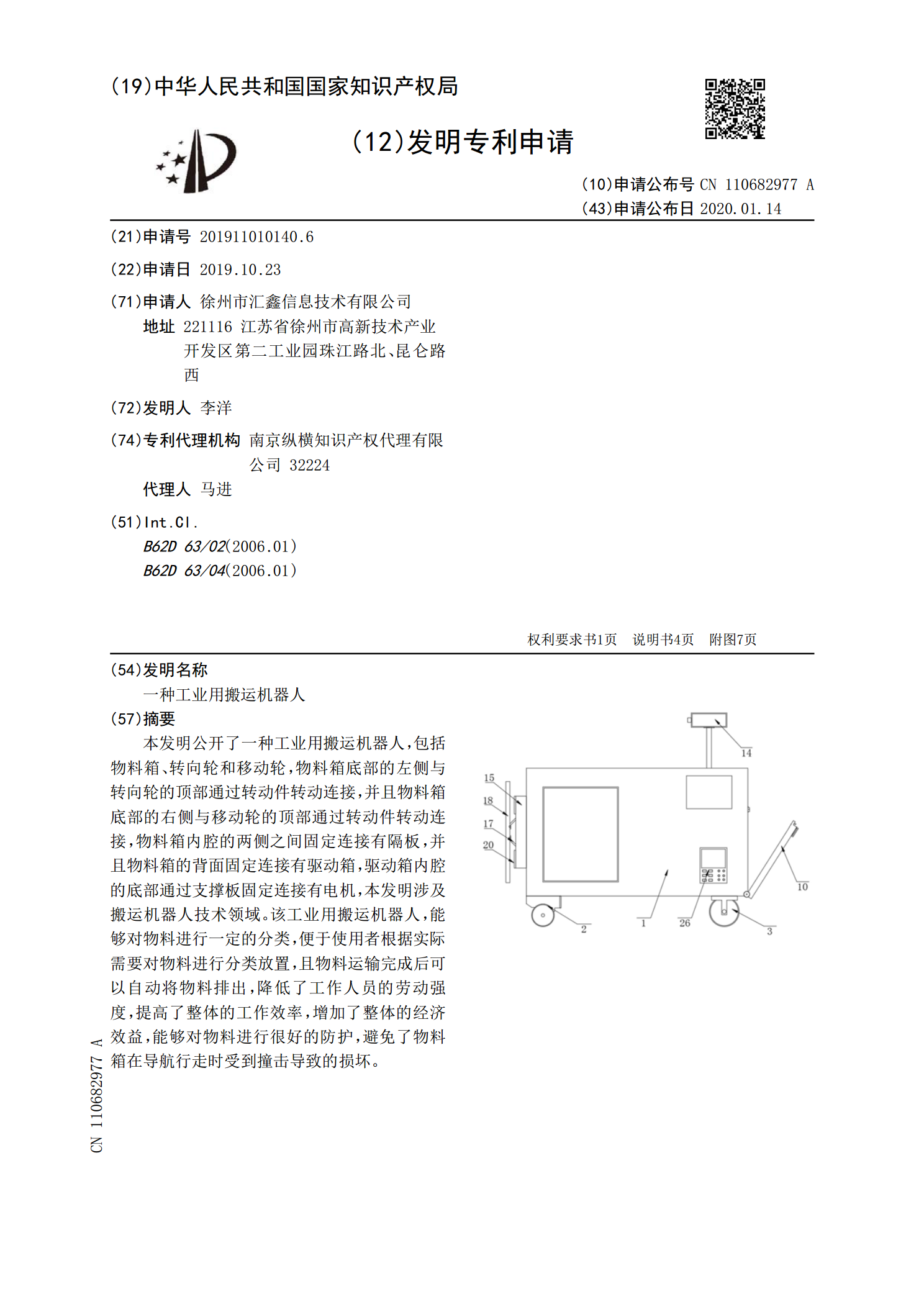
本发明公开了一种工业用搬运机器人,包括物料箱、转向轮和移动轮,物料箱底部的左侧与转向轮的顶部通过转动件转动连接,并且物料箱底部的右侧与移动轮的顶部通过转动件转动连接,物料箱内腔的两侧之间固定连接有隔板,并且物料箱的背面固定连接有驱动箱,驱动箱内腔的底部通过支撑板固定连接有电机,本发明涉及搬运机器人技术领域。该工业用搬运机器人,能够对物料进行一定的分类,便于使用者根据实际需要对物料进行分类放置,且物料运输完成后可以自动将物料排出,降低了工作人员的劳动强度,提高了整体的工作效率,增加了整体的经济效益,能够对物
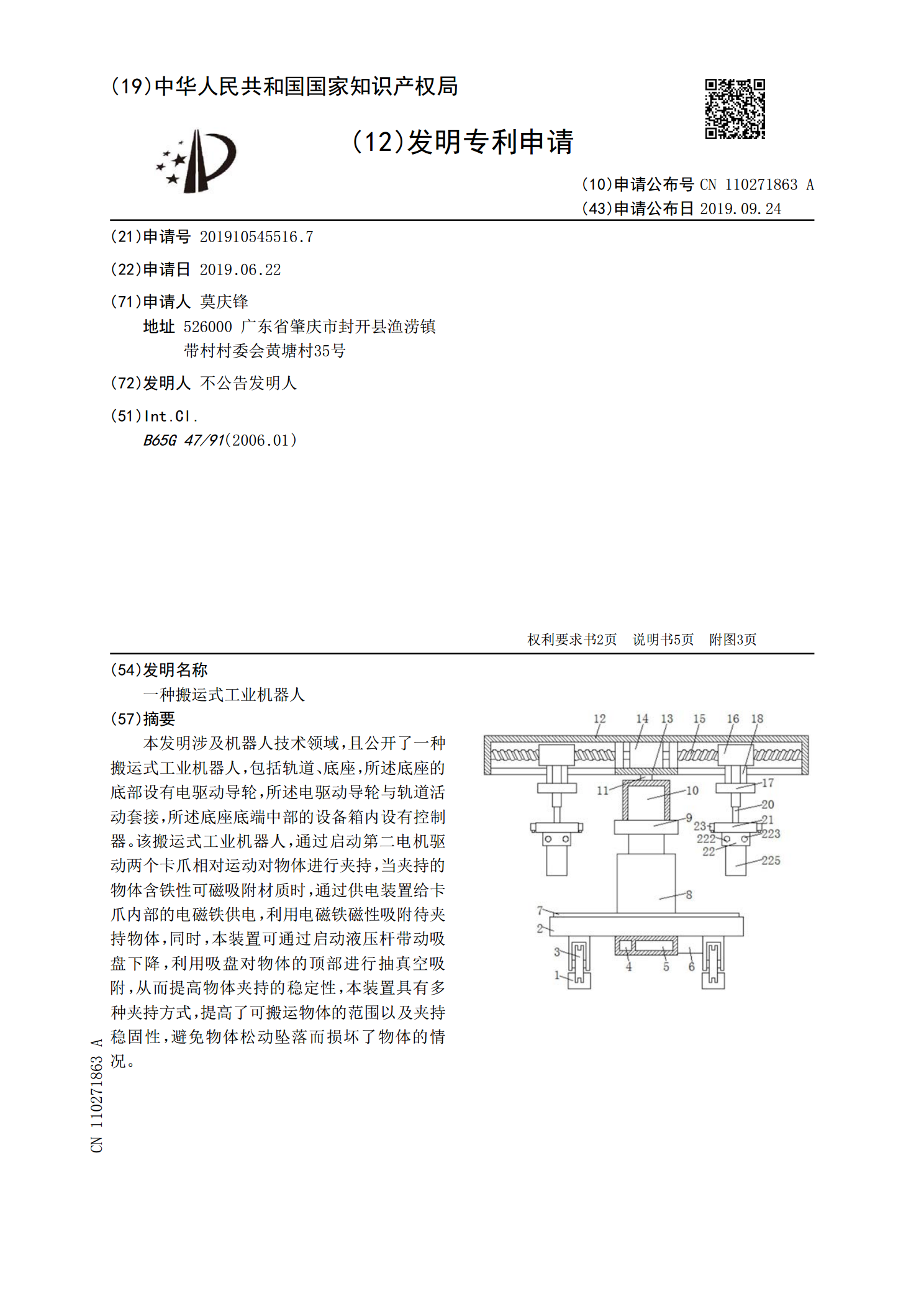
一种搬运式工业机器人.pdf
本发明涉及机器人技术领域,且公开了一种搬运式工业机器人,包括轨道、底座,所述底座的底部设有电驱动导轮,所述电驱动导轮与轨道活动套接,所述底座底端中部的设备箱内设有控制器。该搬运式工业机器人,通过启动第二电机驱动两个卡爪相对运动对物体进行夹持,当夹持的物体含铁性可磁吸附材质时,通过供电装置给卡爪内部的电磁铁供电,利用电磁铁磁性吸附待夹持物体,同时,本装置可通过启动液压杆带动吸盘下降,利用吸盘对物体的顶部进行抽真空吸附,从而提高物体夹持的稳定性,本装置具有多种夹持方式,提高了可搬运物体的范围以及夹持稳固性,避