
一种矿山三维点云地图的构建方法及装置.pdf

Ja****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种矿山三维点云地图的构建方法及装置.pdf
本公开提供了一种矿山三维点云地图的构建方法,包括:S1,进行点云预处理;S2,根据距离选取点云关键帧,先行插入地面点八叉树和全局八叉树中;S3,通过RTK输出的位姿点,计算车轮与地面接触的假设地面点;S4,对当前帧点云及所述假设地面点进行配准并坐标转换;搜索地面点云的邻近点集,并进行配准与坐标转换,将转换后的地面点云插入地面点八叉树;以及在全局点八叉树中搜索当前帧点云的邻近点集,并进行配准与坐标转换,将转换后的当前点云插入全局八叉树;S5,判断本次建图中经历的建图旋转平移矩阵相较上次的改变量是否大于旋转平
三维点云地图构建方法、系统.pdf
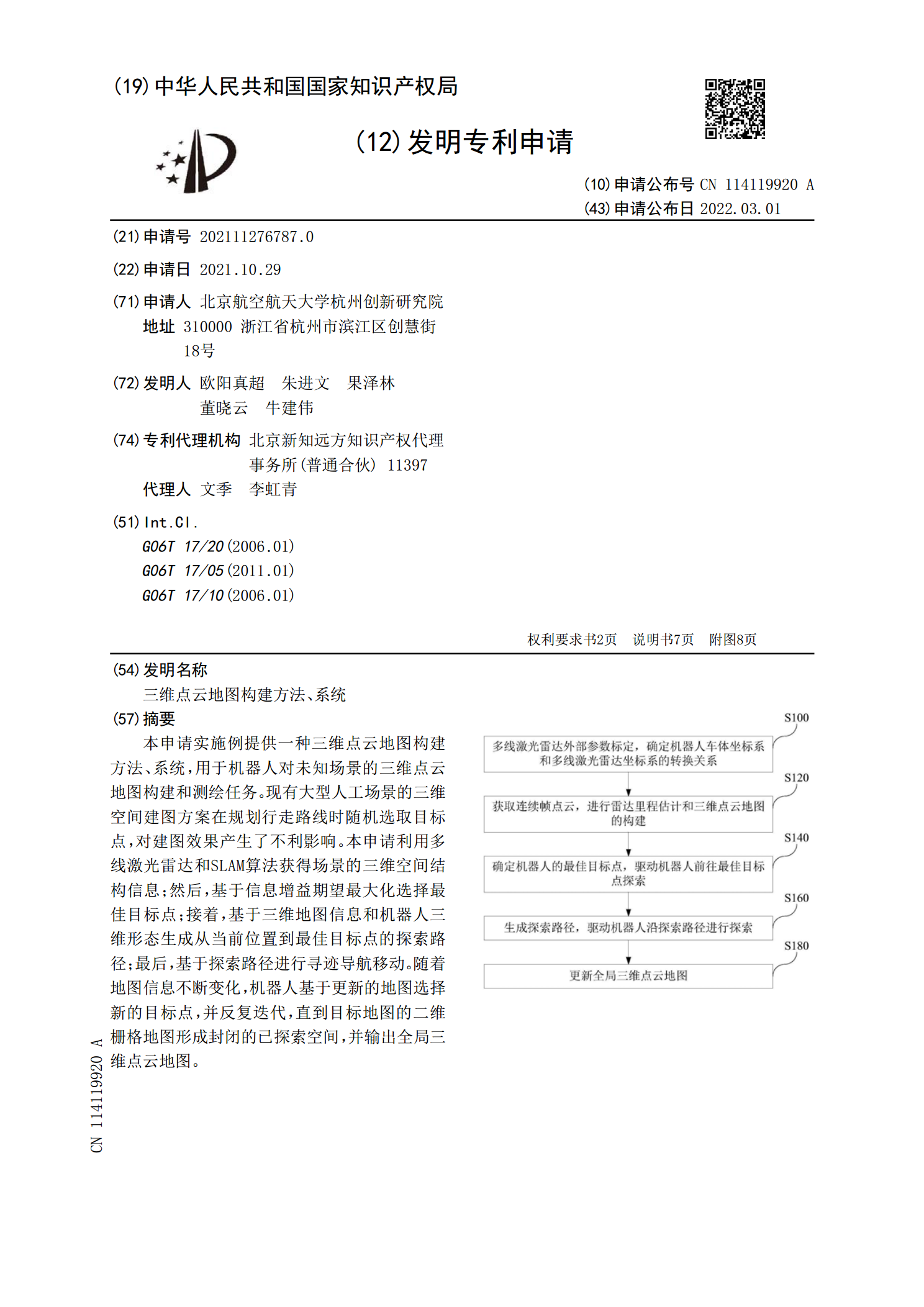
本申请实施例提供一种三维点云地图构建方法、系统,用于机器人对未知场景的三维点云地图构建和测绘任务。现有大型人工场景的三维空间建图方案在规划行走路线时随机选取目标点,对建图效果产生了不利影响。本申请利用多线激光雷达和SLAM算法获得场景的三维空间结构信息;然后,基于信息增益期望最大化选择最佳目标点;接着,基于三维地图信息和机器人三维形态生成从当前位置到最佳目标点的探索路径;最后,基于探索路径进行寻迹导航移动。随着地图信息不断变化,机器人基于更新的地图选择新的目标点,并反复迭代,直到目标地图的二维栅格地图形成

一种点云地图的构建方法、装置及存储介质.pdf
本申请公开了一种点云地图的构建方法、装置及存储介质,用于提高构建点云地图的精确性。本申请公开的点云地图的构建方法包括:采集第一位置的第一信息;完成所述第一信息采集后,移动到第二位置,采集第二位置的第二信息;将所述第二信息与第一信息进行局部匹配,获得局部点云地图;将所述局部点云地图中的动态目标点云删除,获得激光点云地图;其中,所述第一信息包括第一环境点云图和第一环境图像;所述第二信息包括第二环境点云图和第二环境图像。本申请还提供了一种点云地图的构建装置及存储介质。

点云地图构建方法、装置、设备及介质.pdf
本发明实施例公开了一种点云地图构建方法、装置、设备及介质。该方法包括:获取惯导系统采集的惯导数据和相同时段激光雷达采集到的初始点云数据;根据所述惯导数据对所述初始点云数据进行运动补偿,得到中间点云数据;识别所述中间点云数据中的动态障碍物,并从所述中间点云数据中剔除所述动态障碍物,得到所述目标点云数据;将相同点云帧序列的目标点云数据进行配准,并根据配准后的目标点云数据构建点云地图。上述方案,提高了配准的精度和效率;同时,提高了构建的点云地图的质量。

三维点云地图构建方法、系统、电子设备及存储介质.pdf
本发明提供一种三维点云地图构建方法、系统、电子设备及存储介质,该方法包括:基于n帧点云构建初始点云地图和初始位姿图;新建体素;在体素中加入第i帧点云后,确定体素中目标体素单元的个数,其中目标体素单元为包含有加入的各帧点云中的点的体素单元,而后根据目标体素单元的个数确定第i帧点云是否为关键帧点云,若是,则将所有目标体素单元中点云的点清零,令i=i+1,反之,则直接令i=i+1,并重新在体素中加入第i帧点云,直至i=n;基于n帧点云中的关键帧点云和非关键帧点云以及初始位姿图,获取每帧点云的目标位姿;基于n帧点