
一种电动汽车双电机驱动系统及其功率耦合综合控制方法.pdf

曾琪****是我


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电动汽车双电机驱动系统及其功率耦合综合控制方法.pdf
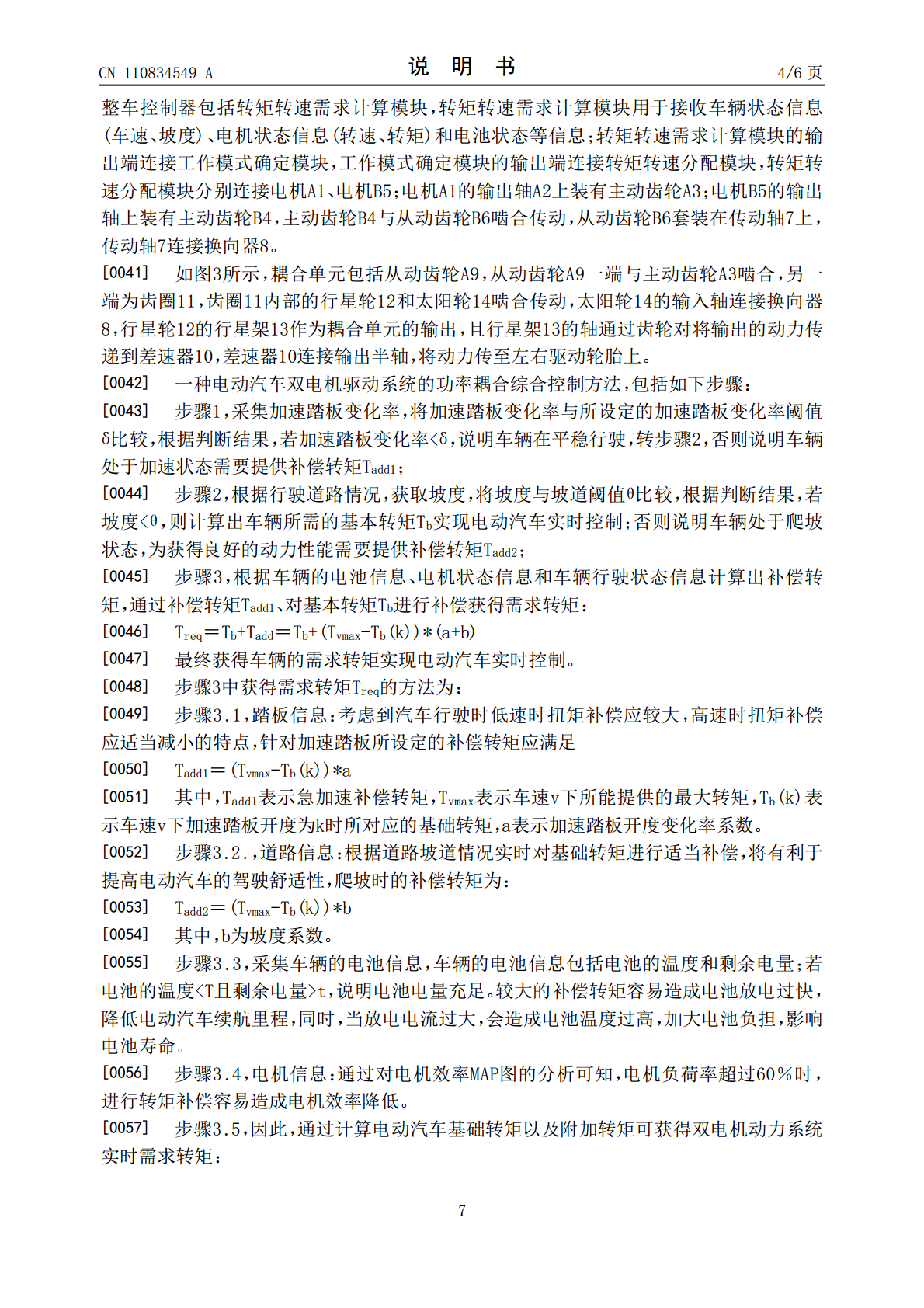
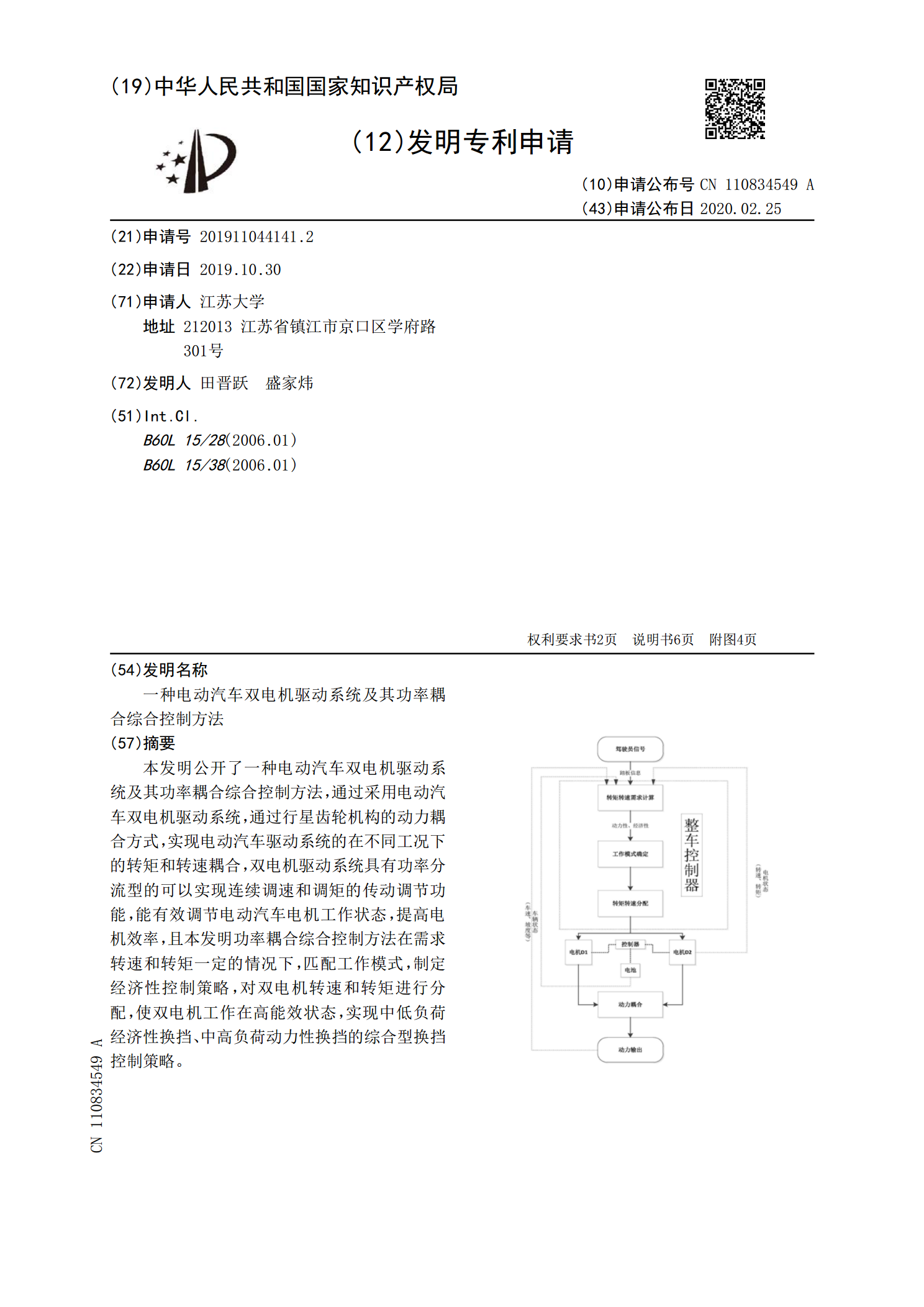
本发明公开了一种电动汽车双电机驱动系统及其功率耦合综合控制方法,通过采用电动汽车双电机驱动系统,通过行星齿轮机构的动力耦合方式,实现电动汽车驱动系统的在不同工况下的转矩和转速耦合,双电机驱动系统具有功率分流型的可以实现连续调速和调矩的传动调节功能,能有效调节电动汽车电机工作状态,提高电机效率,且本发明功率耦合综合控制方法在需求转速和转矩一定的情况下,匹配工作模式,制定经济性控制策略,对双电机转速和转矩进行分配,使双电机工作在高能效状态,实现中低负荷经济性换挡、中高负荷动力性换挡的综合型换挡控制策略。
一种电动汽车双电机驱动系统及其控制方法.pdf
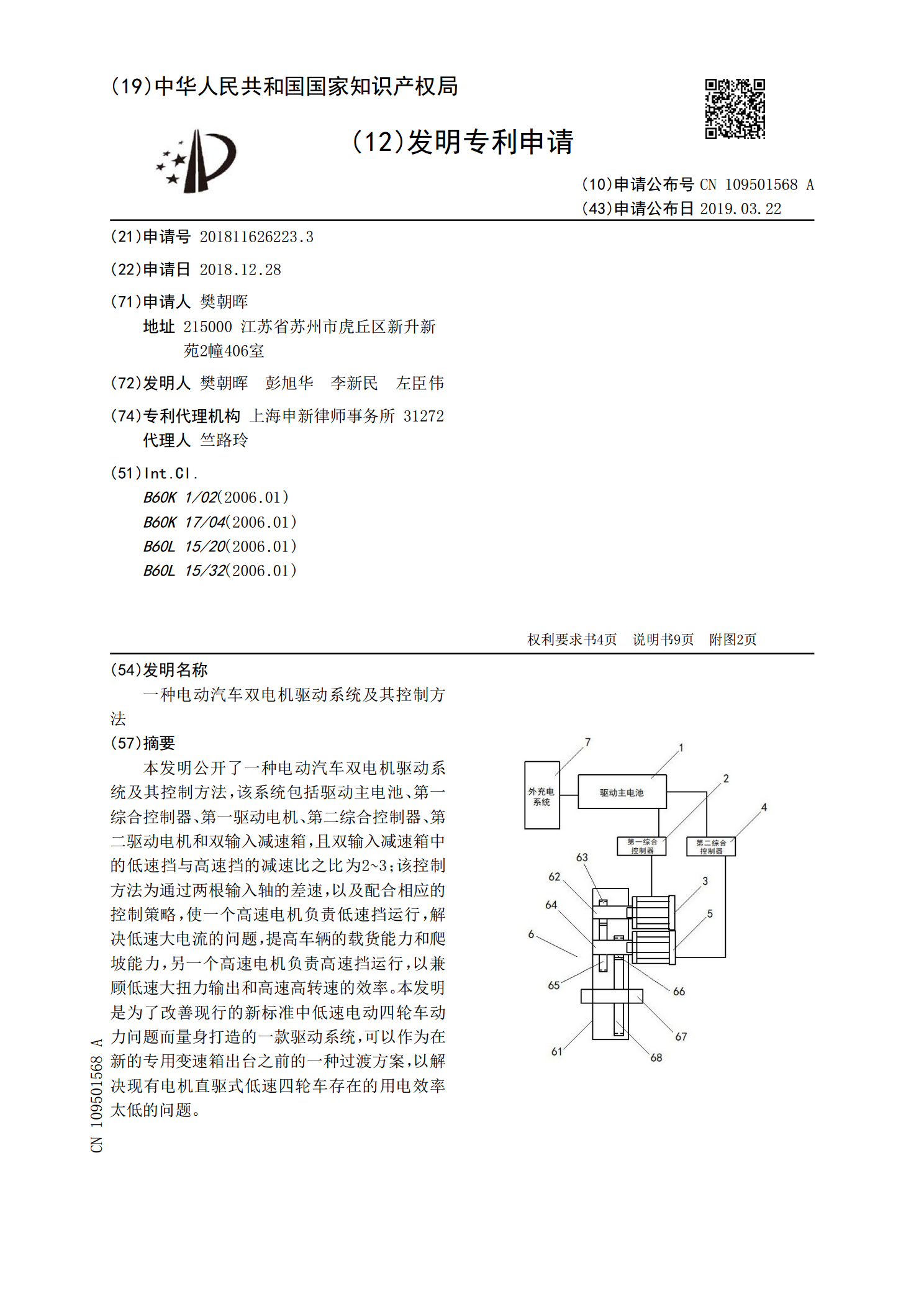
本发明公开了一种电动汽车双电机驱动系统及其控制方法,该系统包括驱动主电池、第一综合控制器、第一驱动电机、第二综合控制器、第二驱动电机和双输入减速箱,且双输入减速箱中的低速挡与高速挡的减速比之比为2~3;该控制方法为通过两根输入轴的差速,以及配合相应的控制策略,使一个高速电机负责低速挡运行,解决低速大电流的问题,提高车辆的载货能力和爬坡能力,另一个高速电机负责高速挡运行,以兼顾低速大扭力输出和高速高转速的效率。本发明是为了改善现行的新标准中低速电动四轮车动力问题而量身打造的一款驱动系统,可以作为在新的专用变

一种电动汽车双电机耦合驱动系统.pdf
本发明公开了一种电动汽车双电机耦合驱动系统,克服现有技术存在的工作模式少、装置体积大、布置难、电机负荷率低的问题,该电动汽车双电机耦合驱动系统中,主电机和辅助电机同轴布置在系统两侧,主电机的输出轴与二号传动齿轮连接,二号传动齿轮与二号离合器的主动盘连接,二号离合器的从动盘与太阳轮通过传动轴连接,传动轴的另一端与三号离合器的从动盘连接,三号离合器的主动盘与辅助电机的输出轴连接,一号传动齿轮与一号离合器的主动盘连接,一号离合器的从动盘与三号传动齿轮连接,三号传动齿轮与齿圈的一端齿轮外啮合,锁止器一端与变速箱壳
一种双电机驱动系统及其控制方法.pdf
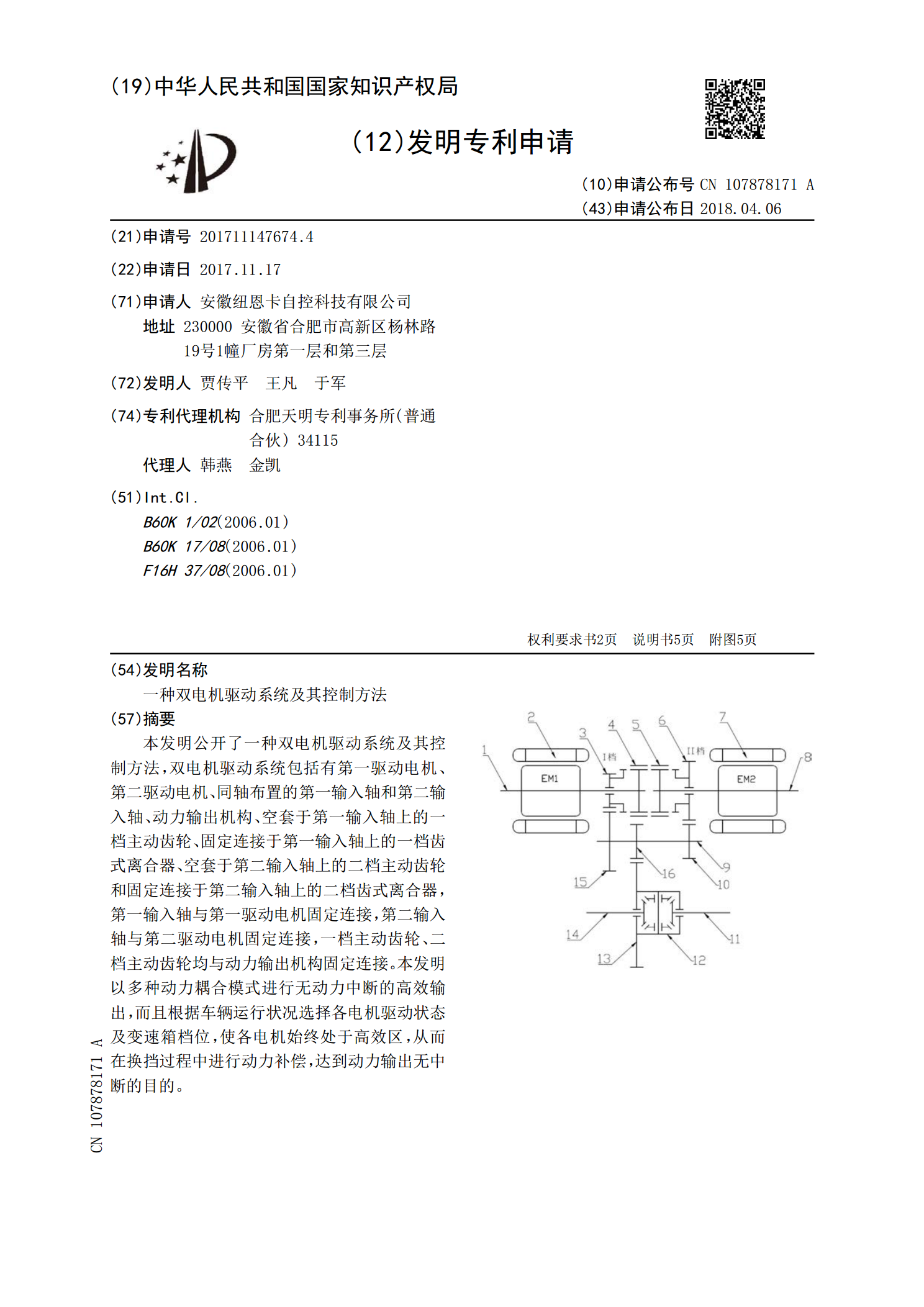
本发明公开了一种双电机驱动系统及其控制方法,双电机驱动系统包括有第一驱动电机、第二驱动电机、同轴布置的第一输入轴和第二输入轴、动力输出机构、空套于第一输入轴上的一档主动齿轮、固定连接于第一输入轴上的一档齿式离合器、空套于第二输入轴上的二档主动齿轮和固定连接于第二输入轴上的二档齿式离合器,第一输入轴与第一驱动电机固定连接,第二输入轴与第二驱动电机固定连接,一档主动齿轮、二档主动齿轮均与动力输出机构固定连接。本发明以多种动力耦合模式进行无动力中断的高效输出,而且根据车辆运行状况选择各电机驱动状态及变速箱档位,
一种双电机电动汽车的多模式耦合驱动系统.pdf
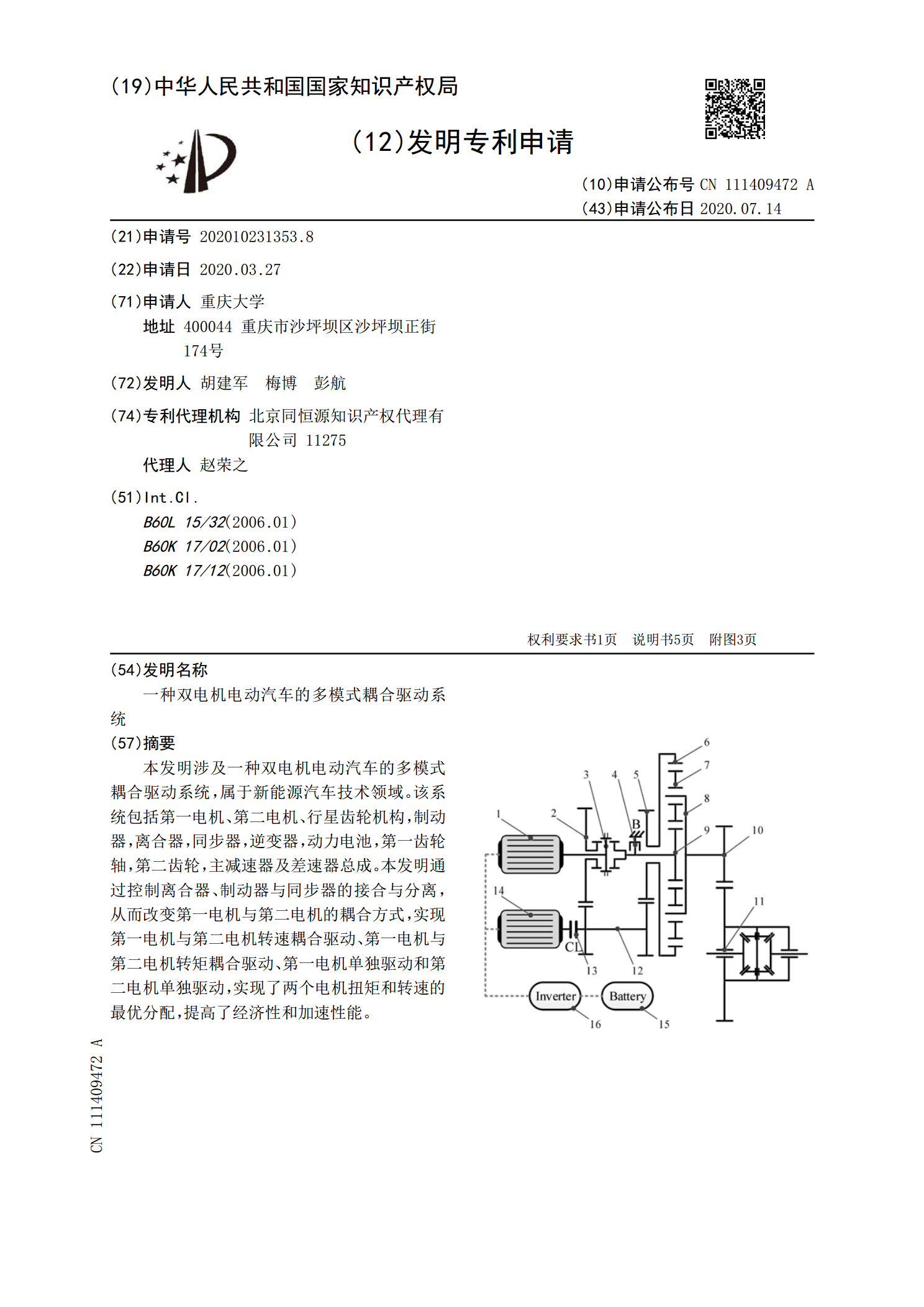
本发明涉及一种双电机电动汽车的多模式耦合驱动系统,属于新能源汽车技术领域。该系统包括第一电机、第二电机、行星齿轮机构,制动器,离合器,同步器,逆变器,动力电池,第一齿轮轴,第二齿轮,主减速器及差速器总成。本发明通过控制离合器、制动器与同步器的接合与分离,从而改变第一电机与第二电机的耦合方式,实现第一电机与第二电机转速耦合驱动、第一电机与第二电机转矩耦合驱动、第一电机单独驱动和第二电机单独驱动,实现了两个电机扭矩和转速的最优分配,提高了经济性和加速性能。