
一种多功能水下垃圾打捞机器人.pdf

一只****呀9

1/8
2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多功能水下垃圾打捞机器人.pdf
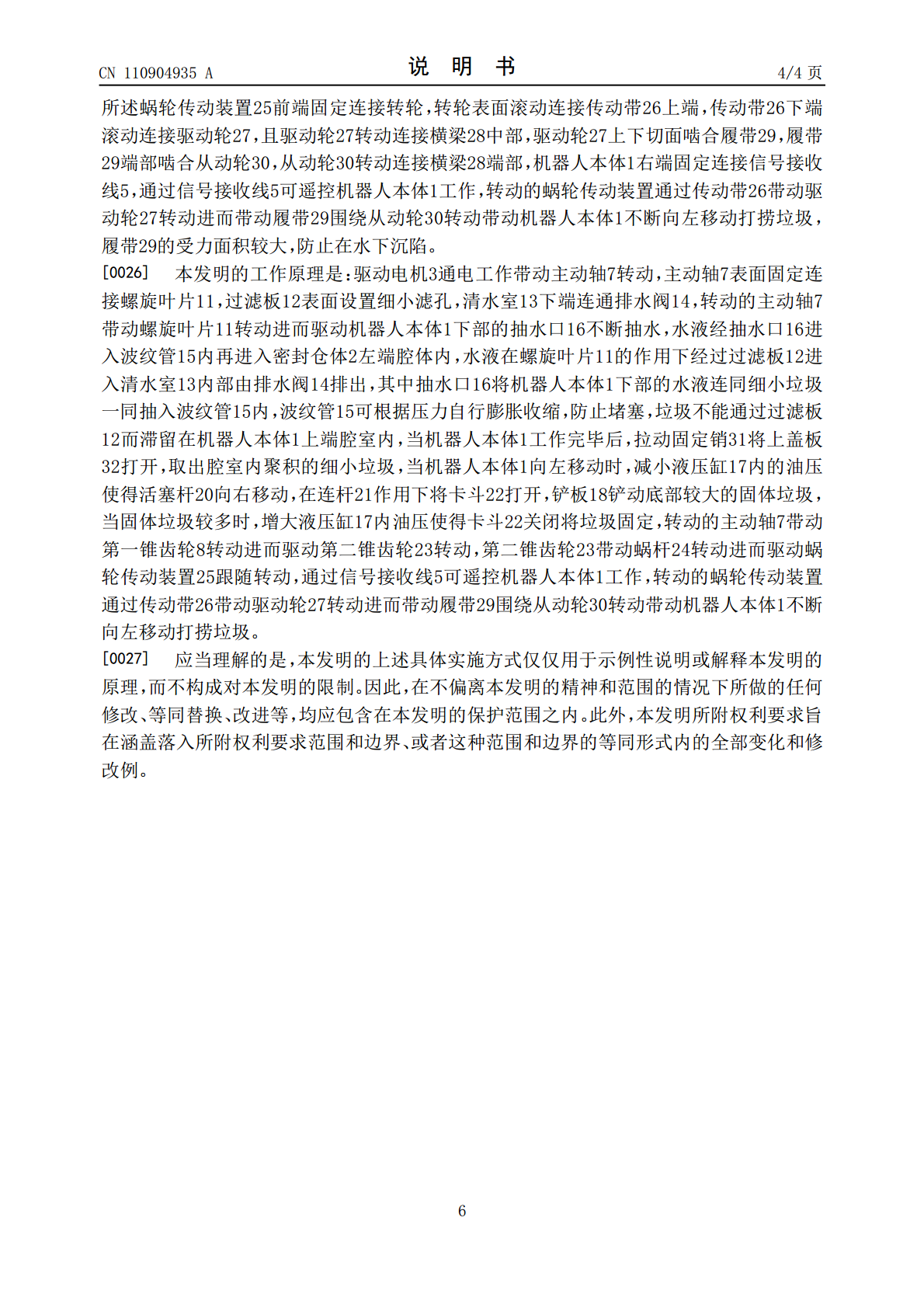
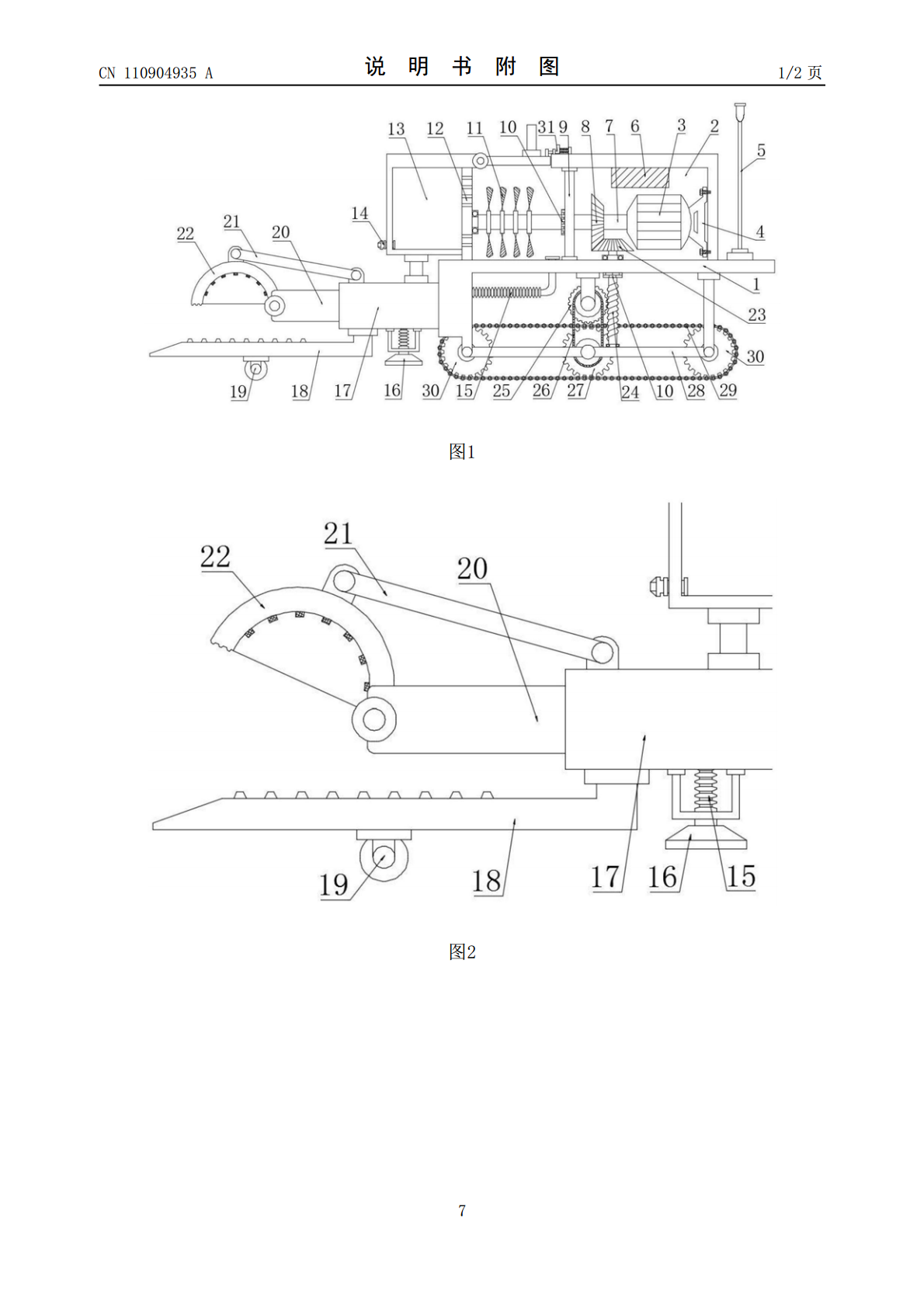
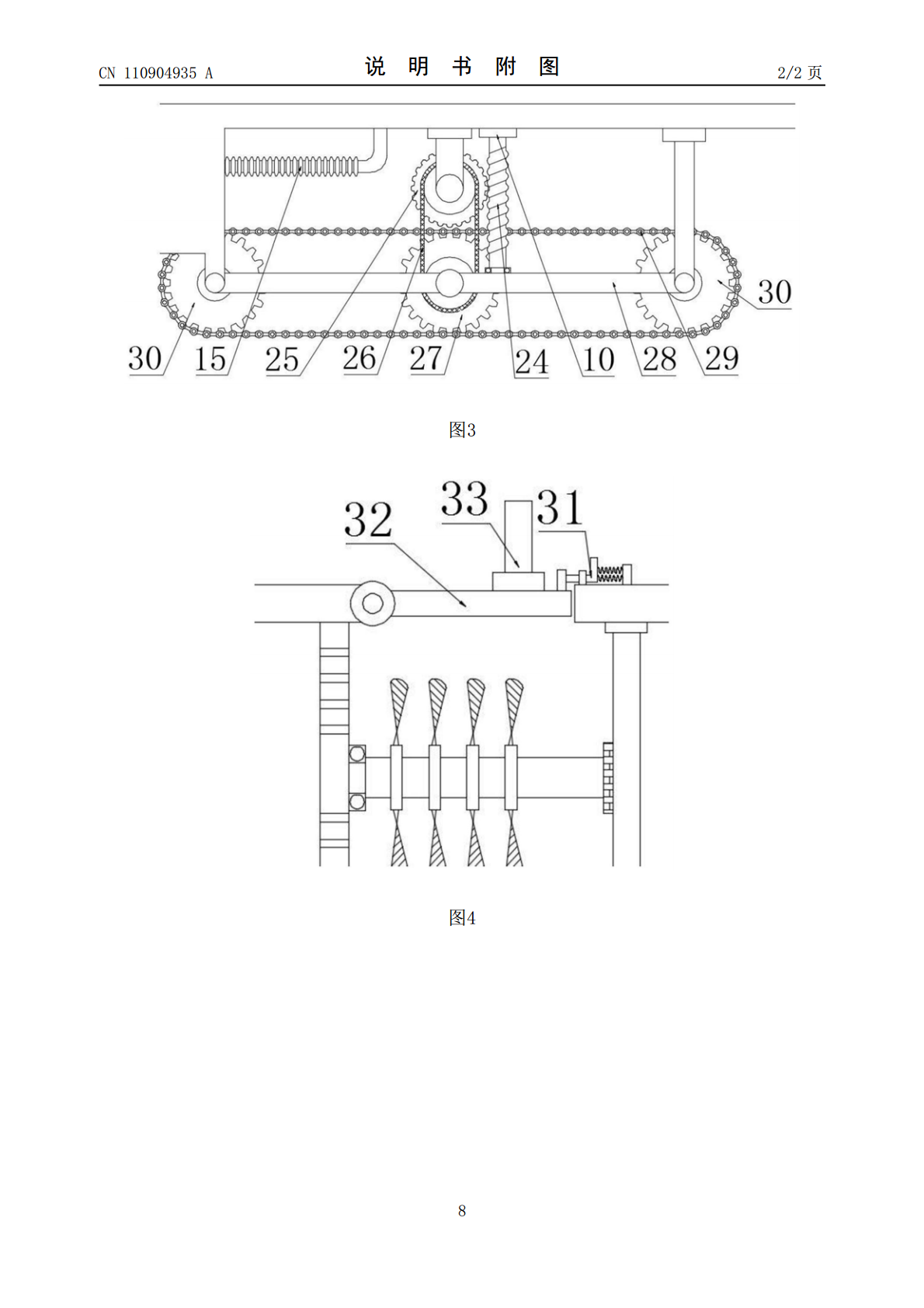
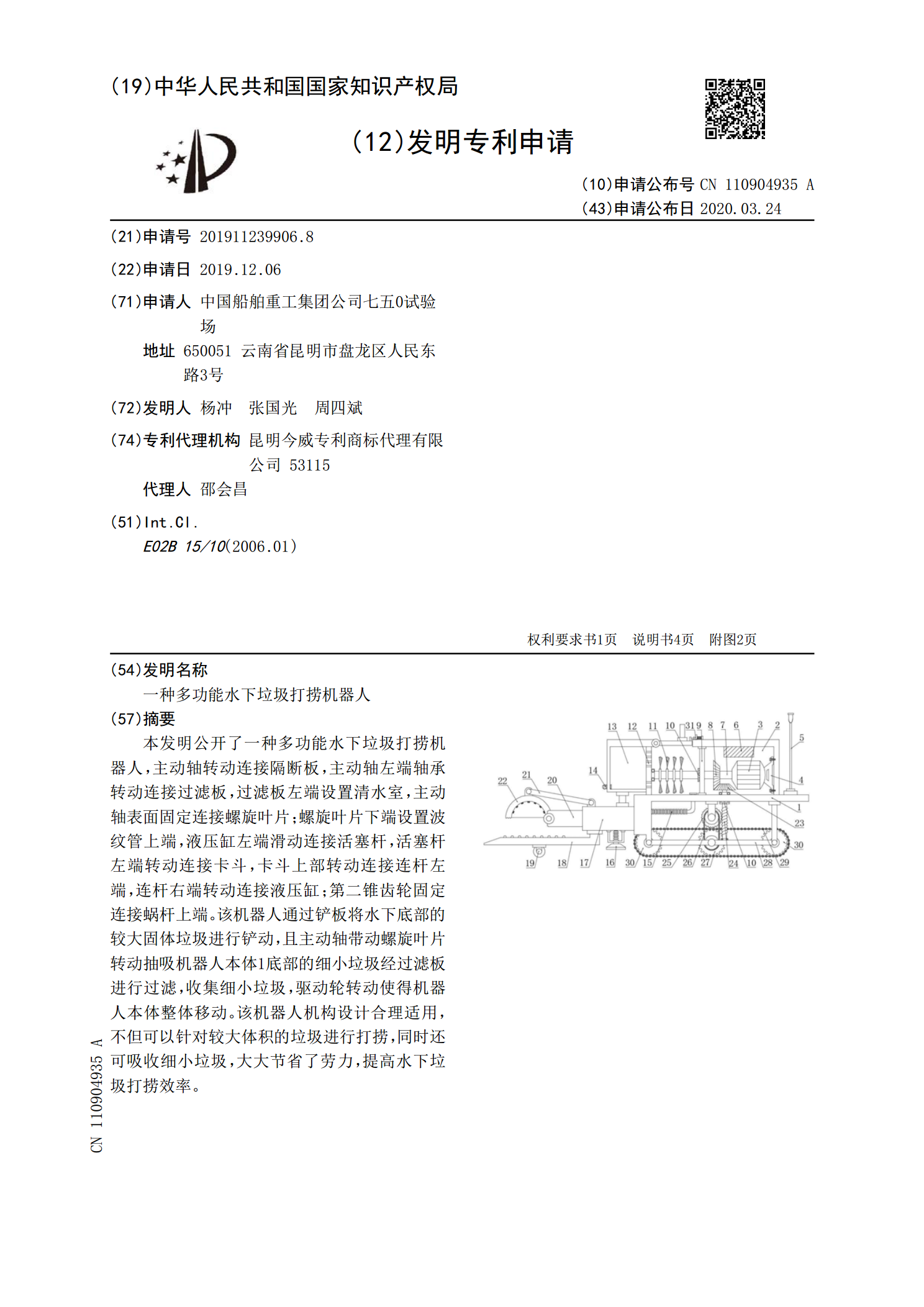
本发明公开了一种多功能水下垃圾打捞机器人,主动轴转动连接隔断板,主动轴左端轴承转动连接过滤板,过滤板左端设置清水室,主动轴表面固定连接螺旋叶片;螺旋叶片下端设置波纹管上端,液压缸左端滑动连接活塞杆,活塞杆左端转动连接卡斗,卡斗上部转动连接连杆左端,连杆右端转动连接液压缸;第二锥齿轮固定连接蜗杆上端。该机器人通过铲板将水下底部的较大固体垃圾进行铲动,且主动轴带动螺旋叶片转动抽吸机器人本体1底部的细小垃圾经过滤板进行过滤,收集细小垃圾,驱动轮转动使得机器人本体整体移动。该机器人机构设计合理适用,不但可以针对较

一种水下作业打捞机器人.pdf
本发明涉及水下机器人技术领域,且公开了一种水下作业打捞机器人,包括侧板,侧板的右侧固定安装有底板,底板的顶部分别固定安装有支持板、安装座和安装环,安装座的顶部固定设有机械手组件,通过直升降推进组件、推进器组件和鱼鳍组件的相互配合,通过改变一对推进器组件的运转速度,通过液压杆改变风向板的方向,进而改变水流方向使得设备转动。本发明通过两种移动方式,使得设备在水下左右移动的方式多样化,控制过程简单,稳定性高,使用寿命长。同时,本发明通过一对夹手与转轴的螺旋涡状齿相啮合,使得设备通过调整驱动马达的转向,即可改变机
一种远程控制的水下打捞机器人.pdf
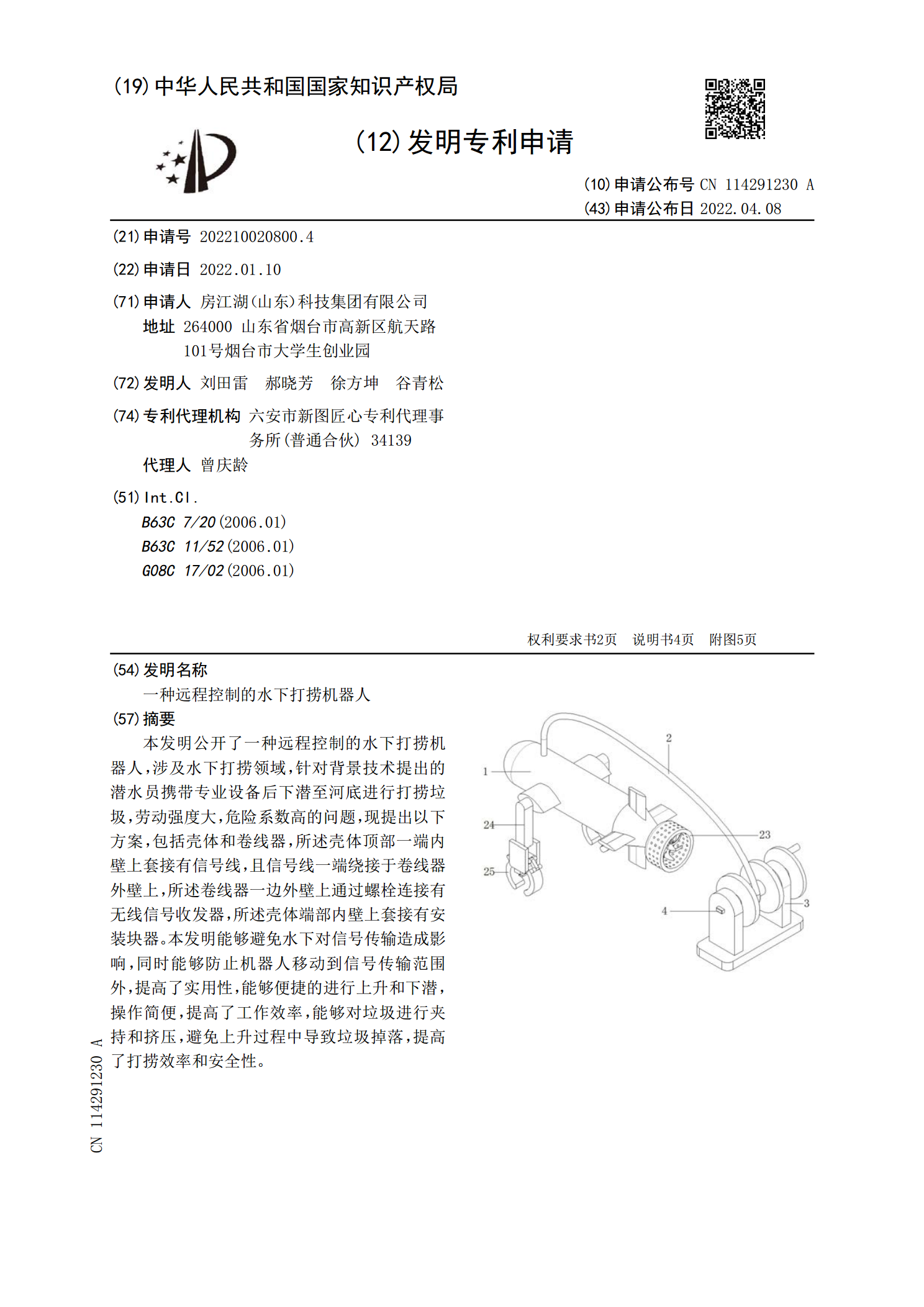
本发明公开了一种远程控制的水下打捞机器人,涉及水下打捞领域,针对背景技术提出的潜水员携带专业设备后下潜至河底进行打捞垃圾,劳动强度大,危险系数高的问题,现提出以下方案,包括壳体和卷线器,所述壳体顶部一端内壁上套接有信号线,且信号线一端绕接于卷线器外壁上,所述卷线器一边外壁上通过螺栓连接有无线信号收发器,所述壳体端部内壁上套接有安装块器。本发明能够避免水下对信号传输造成影响,同时能够防止机器人移动到信号传输范围外,提高了实用性,能够便捷的进行上升和下潜,操作简便,提高了工作效率,能够对垃圾进行夹持和挤压,避
一种水下机器人及多功能水下作业装置.pdf
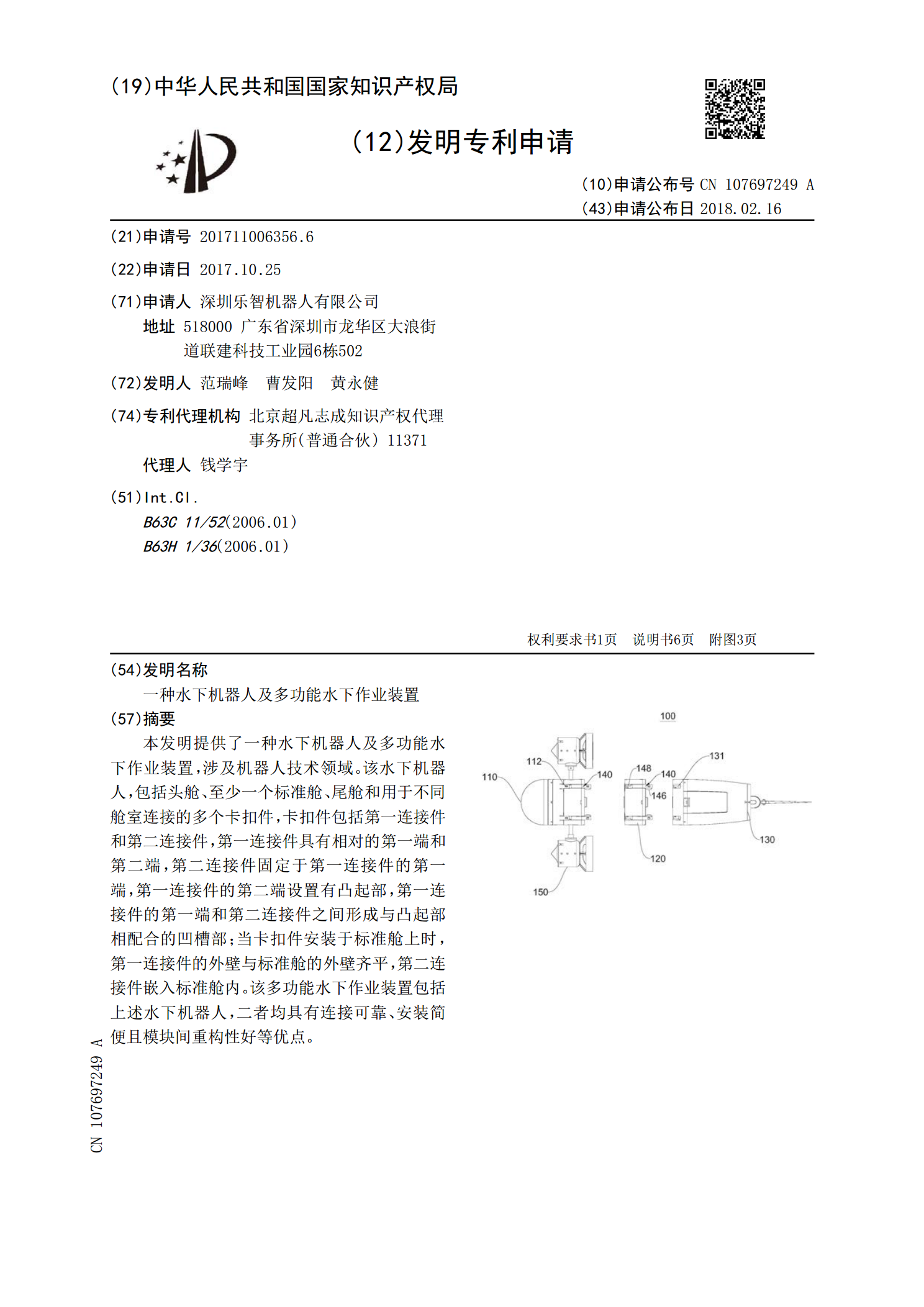
本发明提供了一种水下机器人及多功能水下作业装置,涉及机器人技术领域。该水下机器人,包括头舱、至少一个标准舱、尾舱和用于不同舱室连接的多个卡扣件,卡扣件包括第一连接件和第二连接件,第一连接件具有相对的第一端和第二端,第二连接件固定于第一连接件的第一端,第一连接件的第二端设置有凸起部,第一连接件的第一端和第二连接件之间形成与凸起部相配合的凹槽部;当卡扣件安装于标准舱上时,第一连接件的外壁与标准舱的外壁齐平,第二连接件嵌入标准舱内。该多功能水下作业装置包括上述水下机器人,二者均具有连接可靠、安装简便且模块间重构
一种基于声光磁融合的遥控式水下打捞机器人.pdf
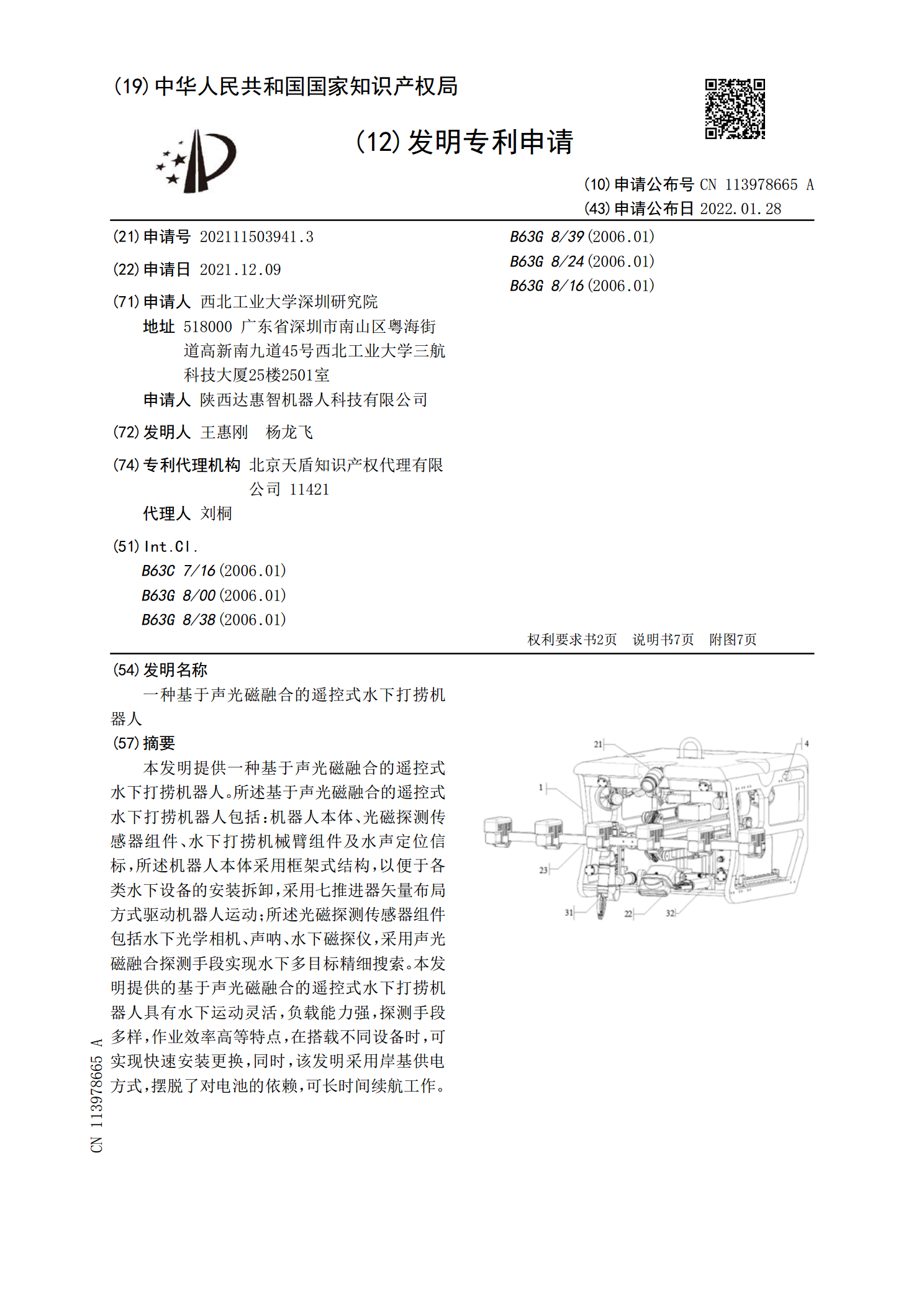
本发明提供一种基于声光磁融合的遥控式水下打捞机器人。所述基于声光磁融合的遥控式水下打捞机器人包括:机器人本体、光磁探测传感器组件、水下打捞机械臂组件及水声定位信标,所述机器人本体采用框架式结构,以便于各类水下设备的安装拆卸,采用七推进器矢量布局方式驱动机器人运动;所述光磁探测传感器组件包括水下光学相机、声呐、水下磁探仪,采用声光磁融合探测手段实现水下多目标精细搜索。本发明提供的基于声光磁融合的遥控式水下打捞机器人具有水下运动灵活,负载能力强,探测手段多样,作业效率高等特点,在搭载不同设备时,可实现快速安装