
一种协作机器人一体化关节的轴系结构.pdf

爱欢****23


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种协作机器人一体化关节的轴系结构.pdf
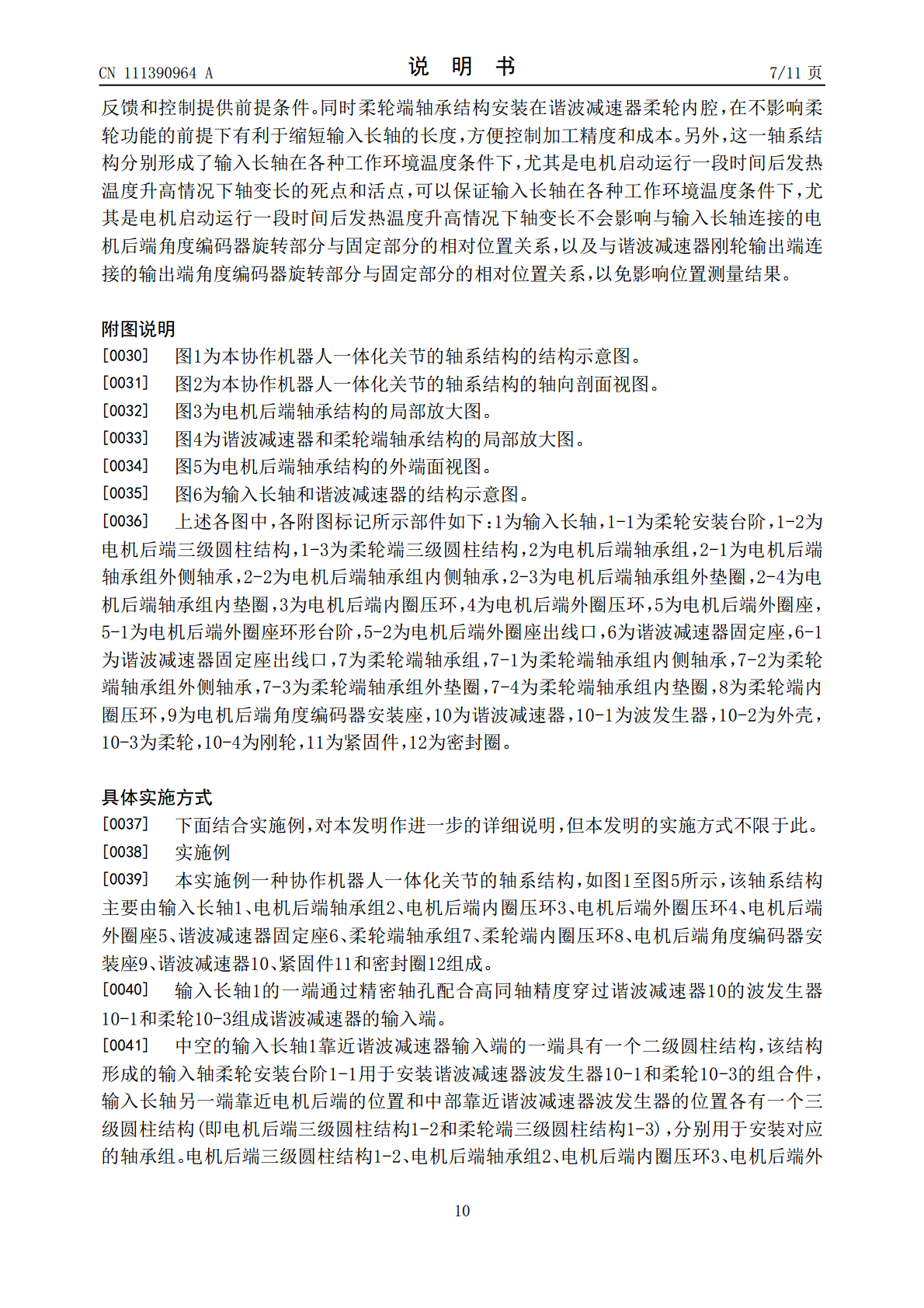
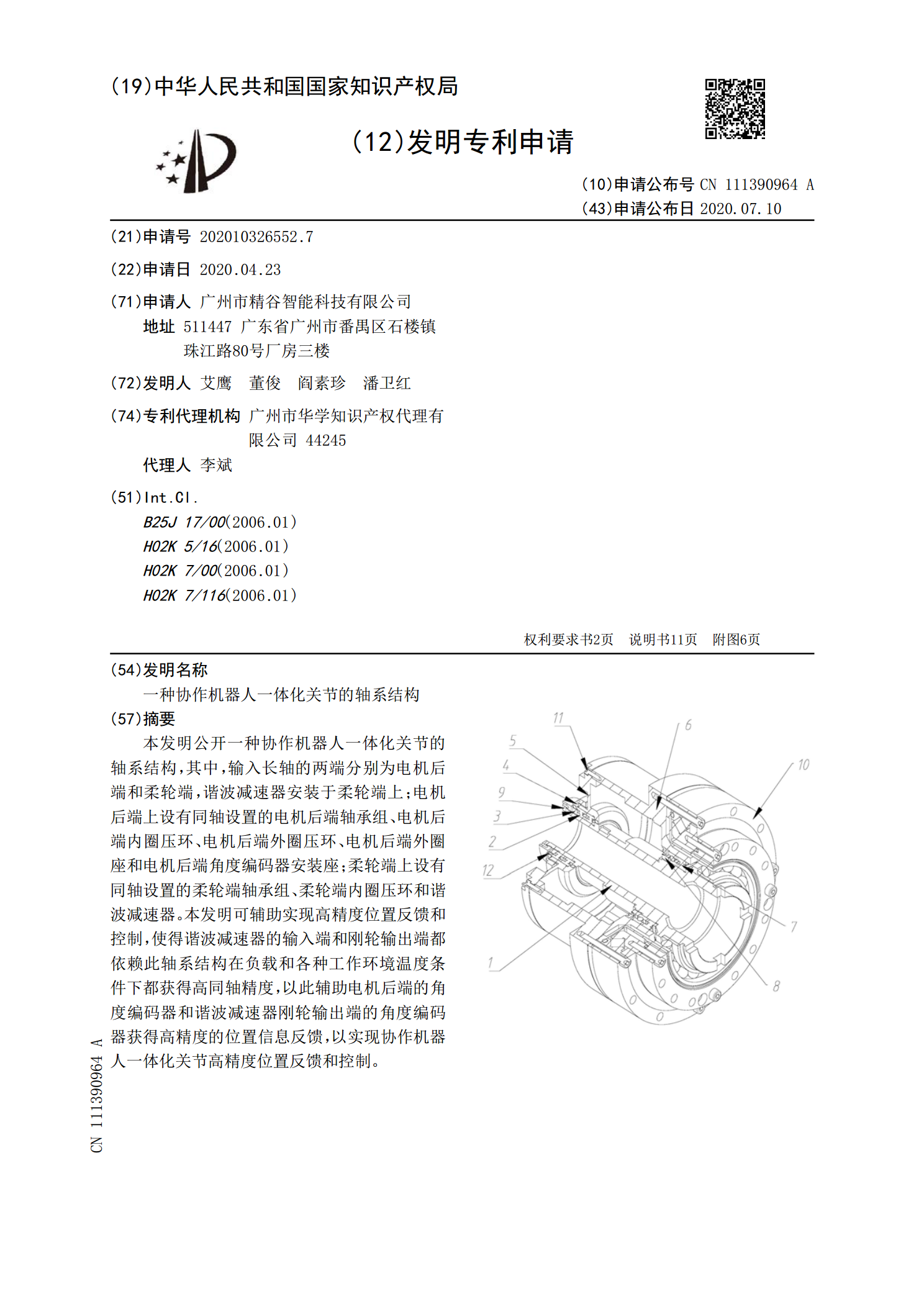
本发明公开一种协作机器人一体化关节的轴系结构,其中,输入长轴的两端分别为电机后端和柔轮端,谐波减速器安装于柔轮端上;电机后端上设有同轴设置的电机后端轴承组、电机后端内圈压环、电机后端外圈压环、电机后端外圈座和电机后端角度编码器安装座;柔轮端上设有同轴设置的柔轮端轴承组、柔轮端内圈压环和谐波减速器。本发明可辅助实现高精度位置反馈和控制,使得谐波减速器的输入端和刚轮输出端都依赖此轴系结构在负载和各种工作环境温度条件下都获得高同轴精度,以此辅助电机后端的角度编码器和谐波减速器刚轮输出端的角度编码器获得高精度的位

一种协作机器人关节上的连接结构.pdf
本发明公开了一种协作机器人关节上的连接结构,包括第一连接法兰和第二连接法兰,所述第一连接法兰和所述第二连接法兰之间通过环形卡扣连接在一起,所述第一连接法兰和所述第二连接法兰之间还通过干个连接螺钉固定锁紧,所述第一连接法兰和所述第二连接法兰的轴心线相重合,且所述连接螺钉的轴心线与所述第一连接法兰的轴心线存在夹角。本发明其有利于解决在装配时存在锥面易滑动、锥面螺钉受力不均匀以及轴向位置安装一致性较差的问题。

一种协作型机器人关节模块和协作机器人.pdf
本发明公开了一种协作型机器人关节模块和协作机器人,解决了现有机器人关节模块可伸缩范围有限、灵活性不够等问题,具有能够拾取多方位垃圾、拾取范围大、关节运动灵活的效果。其技术方案为:包括机械手臂,所述机械手臂安装于伸缩关节模块的一端,伸缩关节模块的另一端连接第一旋转模块;所述第一旋转模块通过直角关节模块安装于第二旋转模块上方,所述第二旋转模块底部固定移动型支座;其中,所述机械手臂包括能够多方向弯折的本体框架,所述本体框架固定有用于测量其运动过程中变形的应变传感器。

一种关节机器人的关节结构.pdf
本发明公开了一种关节机器人的关节结构,包括壳体、电机,以及谐波减速器;谐波减速器包括中空的输入轴、中空的椭圆形凸轮、薄壁轴承外壳、中空的刚轮、中空的柔轮、应变片;输入轴的一端与凸轮的一端固定连接;凸轮和薄壁轴承外壳之间设有球形滚动体,柔轮一端设有小模数外齿形,柔轮另一端为薄壁法兰;刚轮内壁和柔轮的一端相适配;薄壁轴承外壳与柔轮的内腔相适配;应变片固定连接在柔轮的侧壁上;刚轮通过螺钉安装于交叉滚子轴承的内圈上,交叉滚子轴承的外圈通过螺钉安装在壳体上;柔轮固定连接在壳体上;电机的定子与壳体固定连接,电机的转子
一种轻型协作机器人柔性关节测试系统.pdf
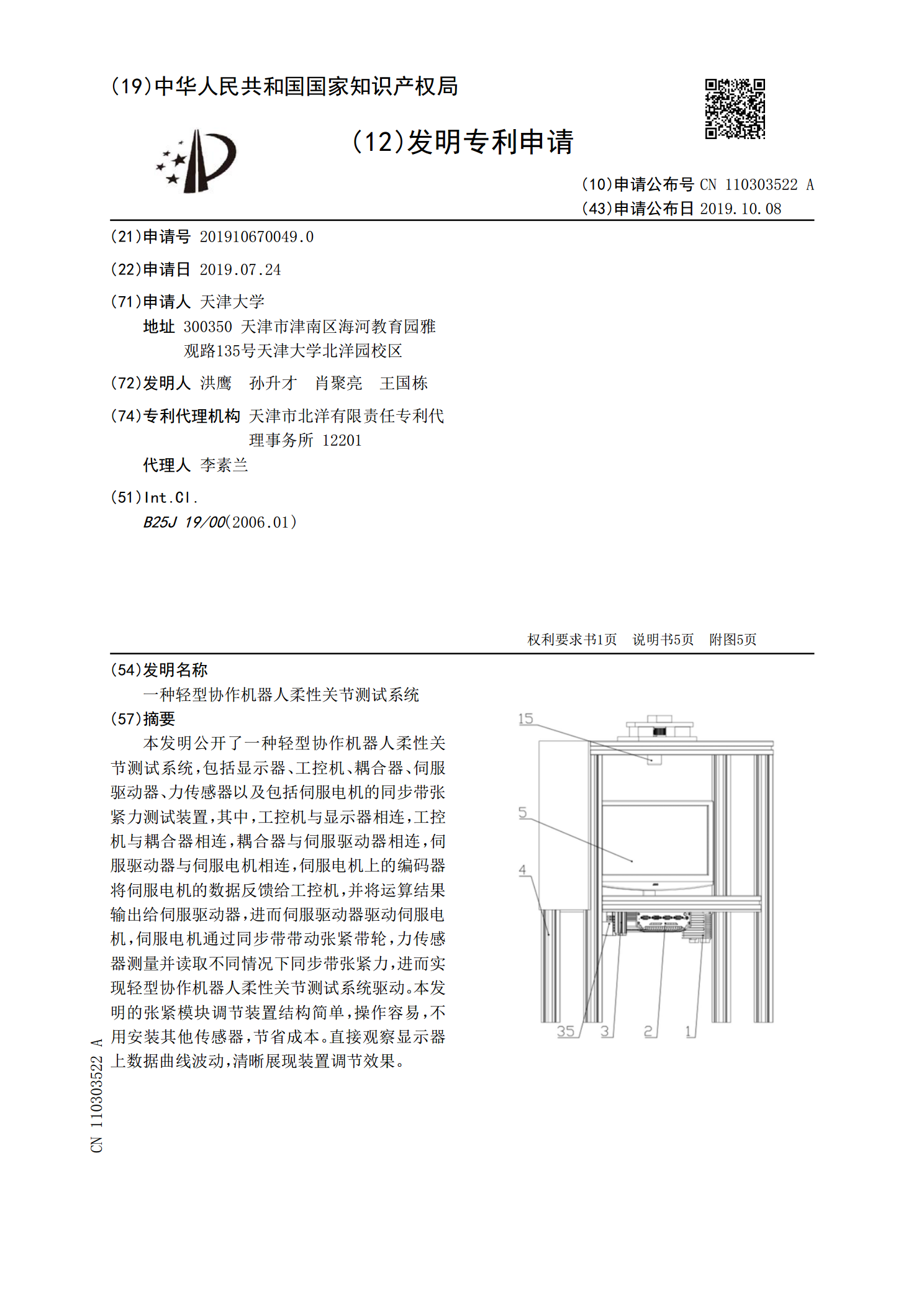
本发明公开了一种轻型协作机器人柔性关节测试系统,包括显示器、工控机、耦合器、伺服驱动器、力传感器以及包括伺服电机的同步带张紧力测试装置,其中,工控机与显示器相连,工控机与耦合器相连,耦合器与伺服驱动器相连,伺服驱动器与伺服电机相连,伺服电机上的编码器将伺服电机的数据反馈给工控机,并将运算结果输出给伺服驱动器,进而伺服驱动器驱动伺服电机,伺服电机通过同步带带动张紧带轮,力传感器测量并读取不同情况下同步带张紧力,进而实现轻型协作机器人柔性关节测试系统驱动。本发明的张紧模块调节装置结构简单,操作容易,不用安装其