
一种关节机器人的关节结构.pdf

新月****姐a


1/8
2/8

3/8
4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种关节机器人的关节结构.pdf
本发明公开了一种关节机器人的关节结构,包括壳体、电机,以及谐波减速器;谐波减速器包括中空的输入轴、中空的椭圆形凸轮、薄壁轴承外壳、中空的刚轮、中空的柔轮、应变片;输入轴的一端与凸轮的一端固定连接;凸轮和薄壁轴承外壳之间设有球形滚动体,柔轮一端设有小模数外齿形,柔轮另一端为薄壁法兰;刚轮内壁和柔轮的一端相适配;薄壁轴承外壳与柔轮的内腔相适配;应变片固定连接在柔轮的侧壁上;刚轮通过螺钉安装于交叉滚子轴承的内圈上,交叉滚子轴承的外圈通过螺钉安装在壳体上;柔轮固定连接在壳体上;电机的定子与壳体固定连接,电机的转子

一种机器人关节编码器的定位结构、关节及机器人.pdf
本公开提供了一种机器人关节编码器的定位结构、关节及机器人,包括安装支架,所述安装支架的中心处设置有减速机轴,安装支架的外沿处设置有读头,形成固定组;所述减速机轴上依次套接有轴承、转接件和锁定件,码盘通过螺钉夹紧于转接件与锁定件之间形成运动组,极大地缩短了读头和码盘之间的尺寸链,提高了编码器的安装精度,实现了编码器的模块化,便于调试和修整。

机器人关节结构.pdf
本发明的一方面提供了一种机器人关节结构。该关节结构包括:关节单元,其包括连接至主体侧连杆的第一部分和连接至外周侧连杆的第二部分;驱动力传递机构,其将旋转驱动力传递到关节单元,以引起第二部分相对于第一部分的相对旋转;以及偏压装置,用于向第二部分施加与相对旋转同轴的旋转偏压力。
一种变厚机器人关节传动结构.pdf
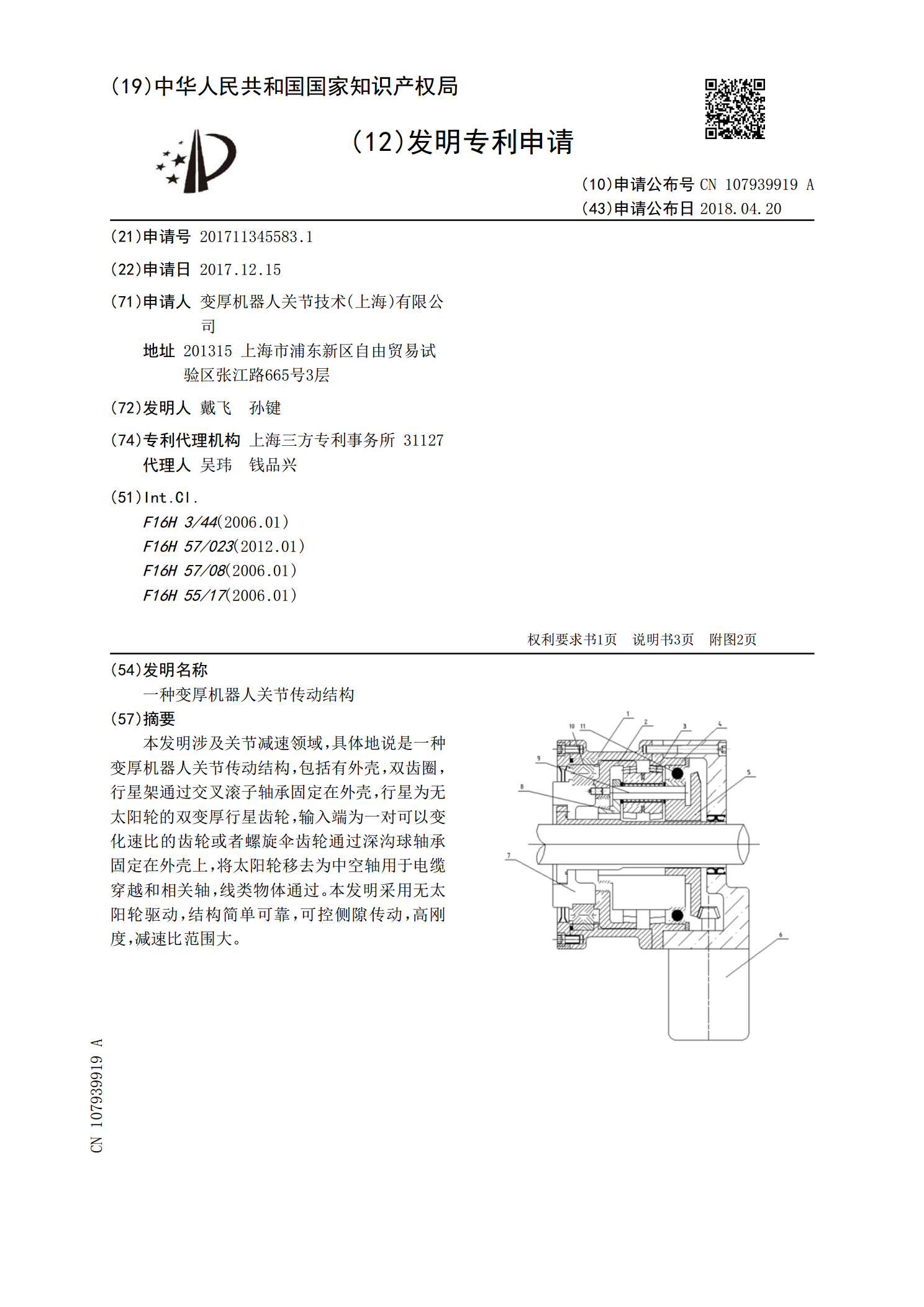
本发明涉及关节减速领域,具体地说是一种变厚机器人关节传动结构,包括有外壳,双齿圈,行星架通过交叉滚子轴承固定在外壳,行星为无太阳轮的双变厚行星齿轮,输入端为一对可以变化速比的齿轮或者螺旋伞齿轮通过深沟球轴承固定在外壳上,将太阳轮移去为中空轴用于电缆穿越和相关轴,线类物体通过。本发明采用无太阳轮驱动,结构简单可靠,可控侧隙传动,高刚度,减速比范围大。
一种变厚机器人关节传动结构.pdf
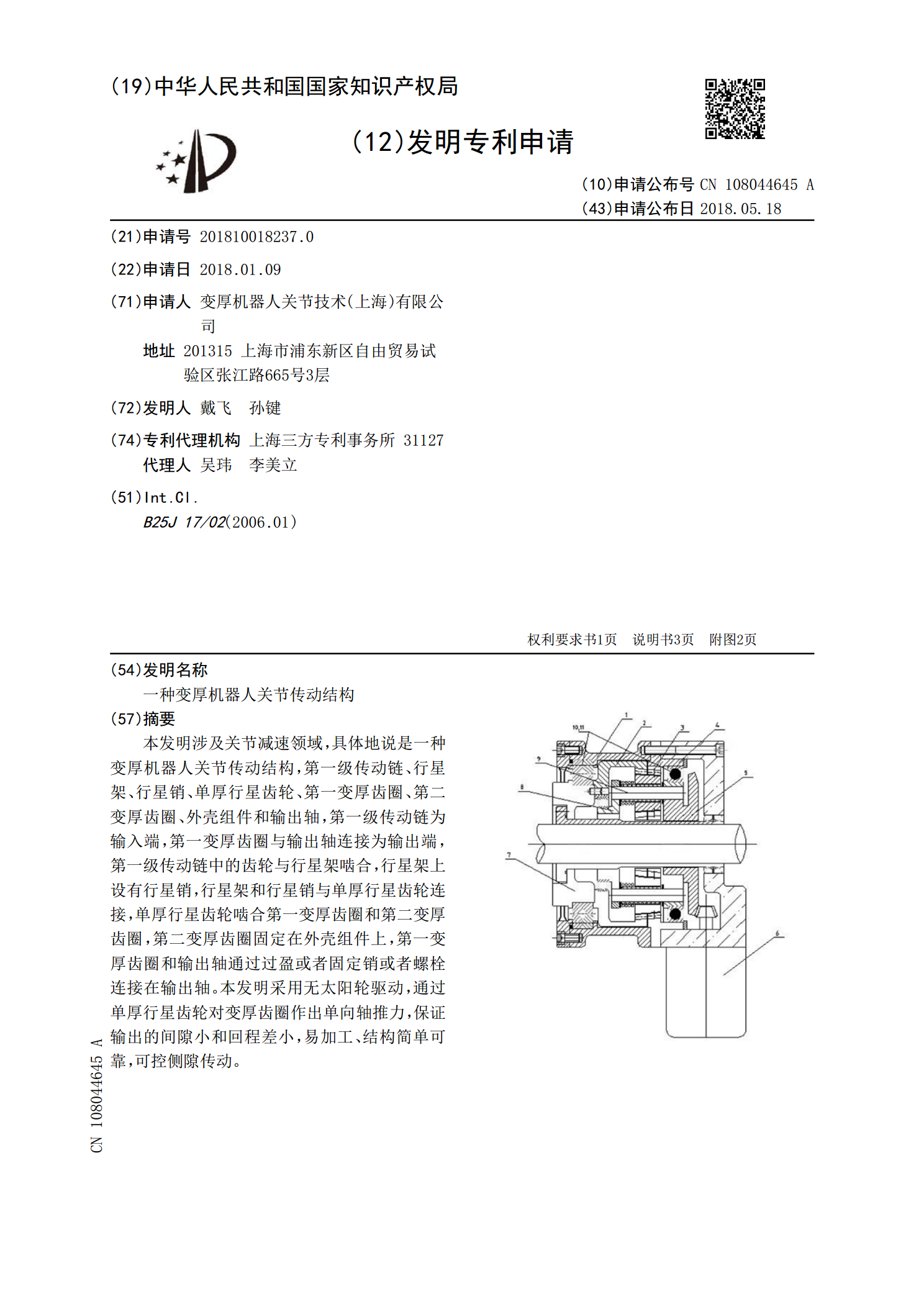
本发明涉及关节减速领域,具体地说是一种变厚机器人关节传动结构,第一级传动链、行星架、行星销、单厚行星齿轮、第一变厚齿圈、第二变厚齿圈、外壳组件和输出轴,第一级传动链为输入端,第一变厚齿圈与输出轴连接为输出端,第一级传动链中的齿轮与行星架啮合,行星架上设有行星销,行星架和行星销与单厚行星齿轮连接,单厚行星齿轮啮合第一变厚齿圈和第二变厚齿圈,第二变厚齿圈固定在外壳组件上,第一变厚齿圈和输出轴通过过盈或者固定销或者螺栓连接在输出轴。本发明采用无太阳轮驱动,通过单厚行星齿轮对变厚齿圈作出单向轴推力,保证输出的间隙