
一种轻型协作机器人柔性关节测试系统.pdf

一条****ee


1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
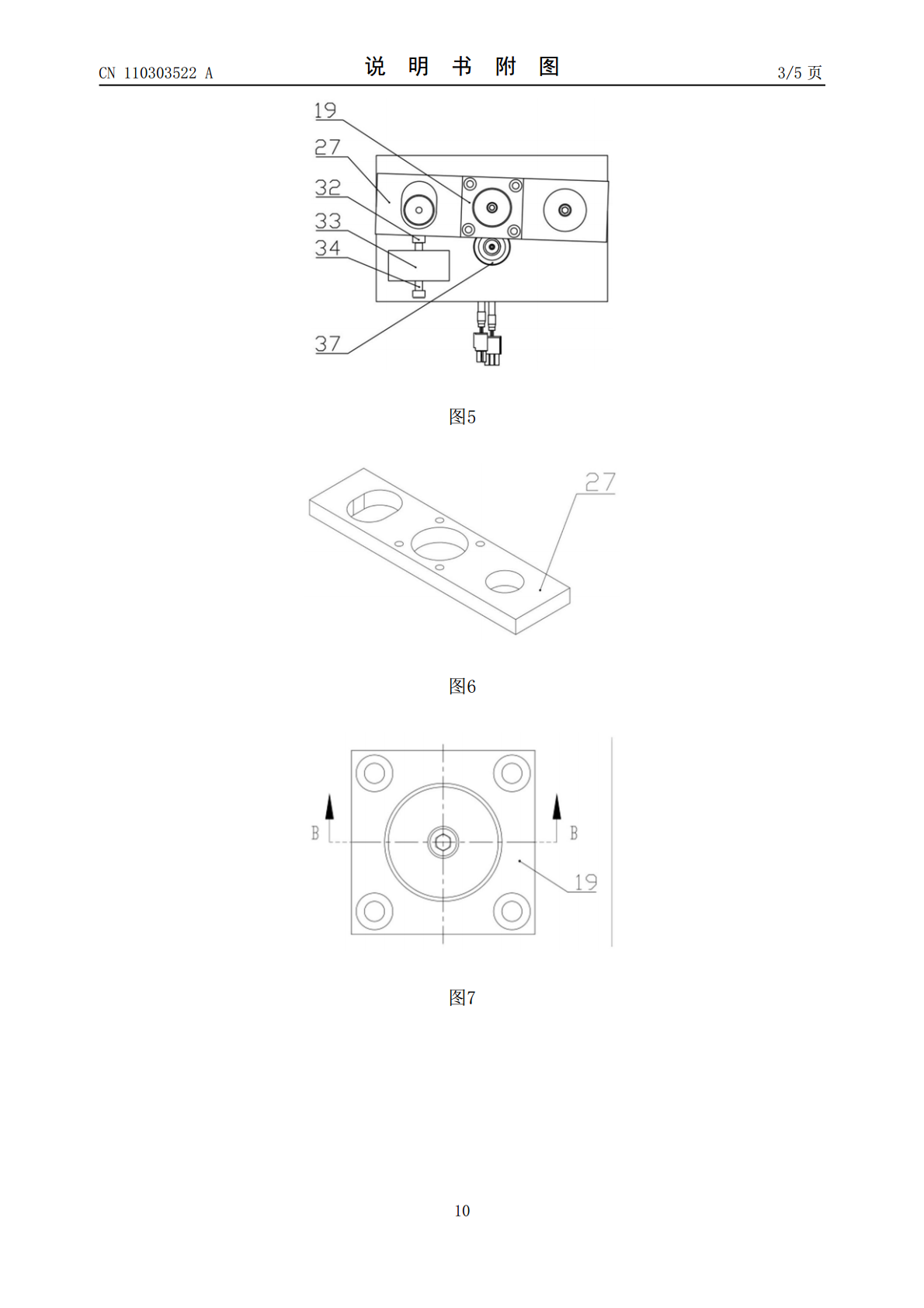
一种轻型协作机器人柔性关节测试系统.pdf
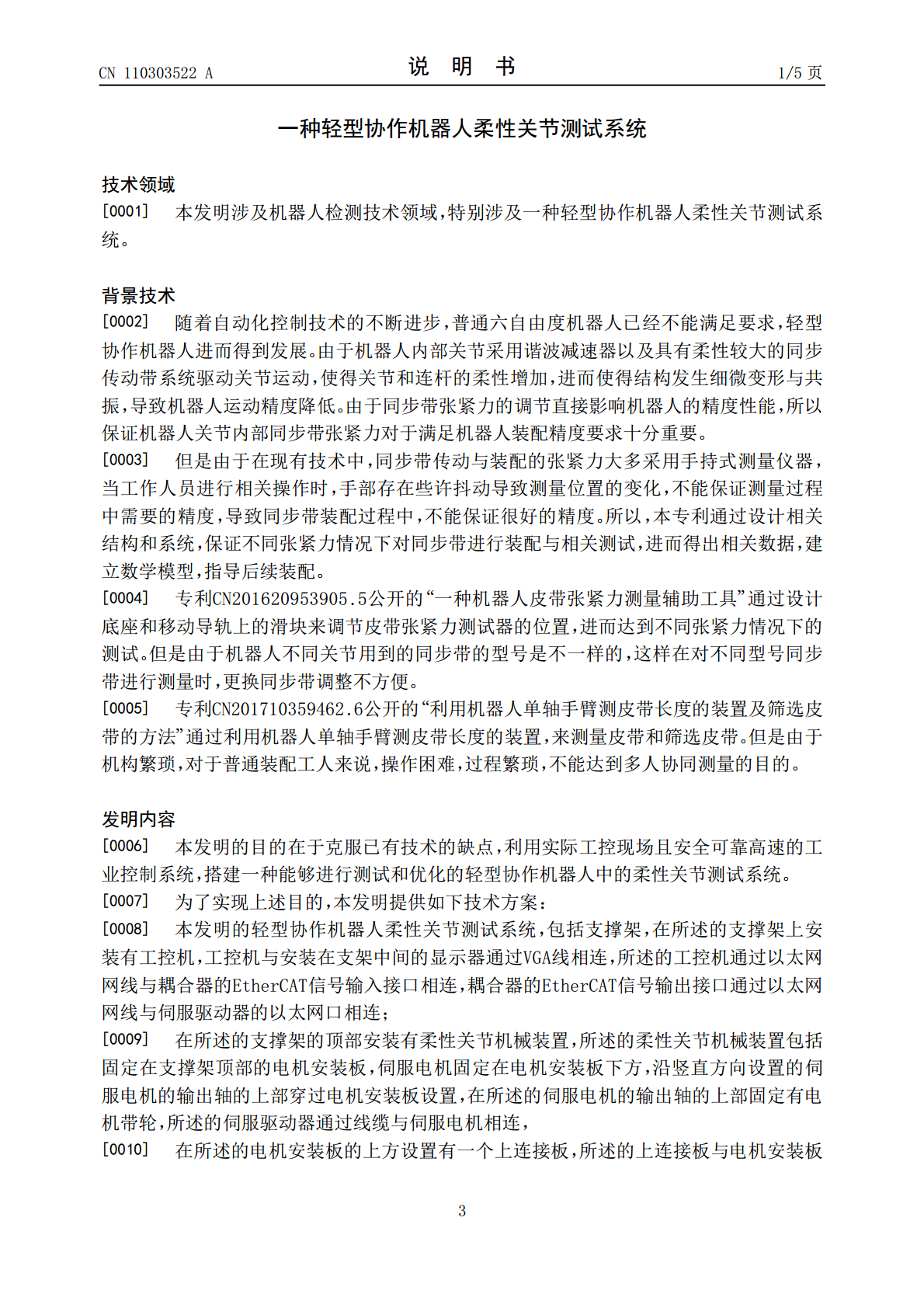
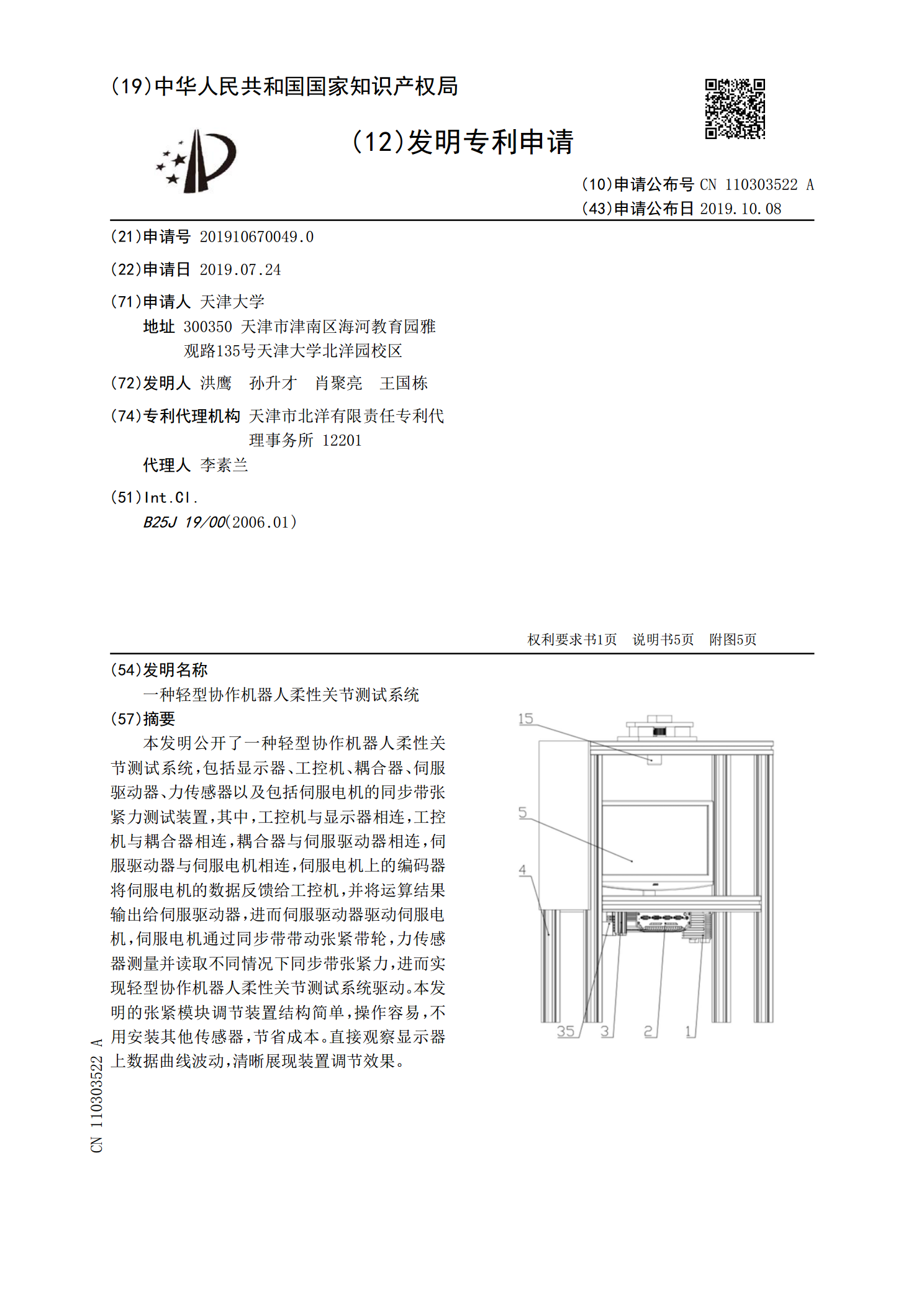
本发明公开了一种轻型协作机器人柔性关节测试系统,包括显示器、工控机、耦合器、伺服驱动器、力传感器以及包括伺服电机的同步带张紧力测试装置,其中,工控机与显示器相连,工控机与耦合器相连,耦合器与伺服驱动器相连,伺服驱动器与伺服电机相连,伺服电机上的编码器将伺服电机的数据反馈给工控机,并将运算结果输出给伺服驱动器,进而伺服驱动器驱动伺服电机,伺服电机通过同步带带动张紧带轮,力传感器测量并读取不同情况下同步带张紧力,进而实现轻型协作机器人柔性关节测试系统驱动。本发明的张紧模块调节装置结构简单,操作容易,不用安装其
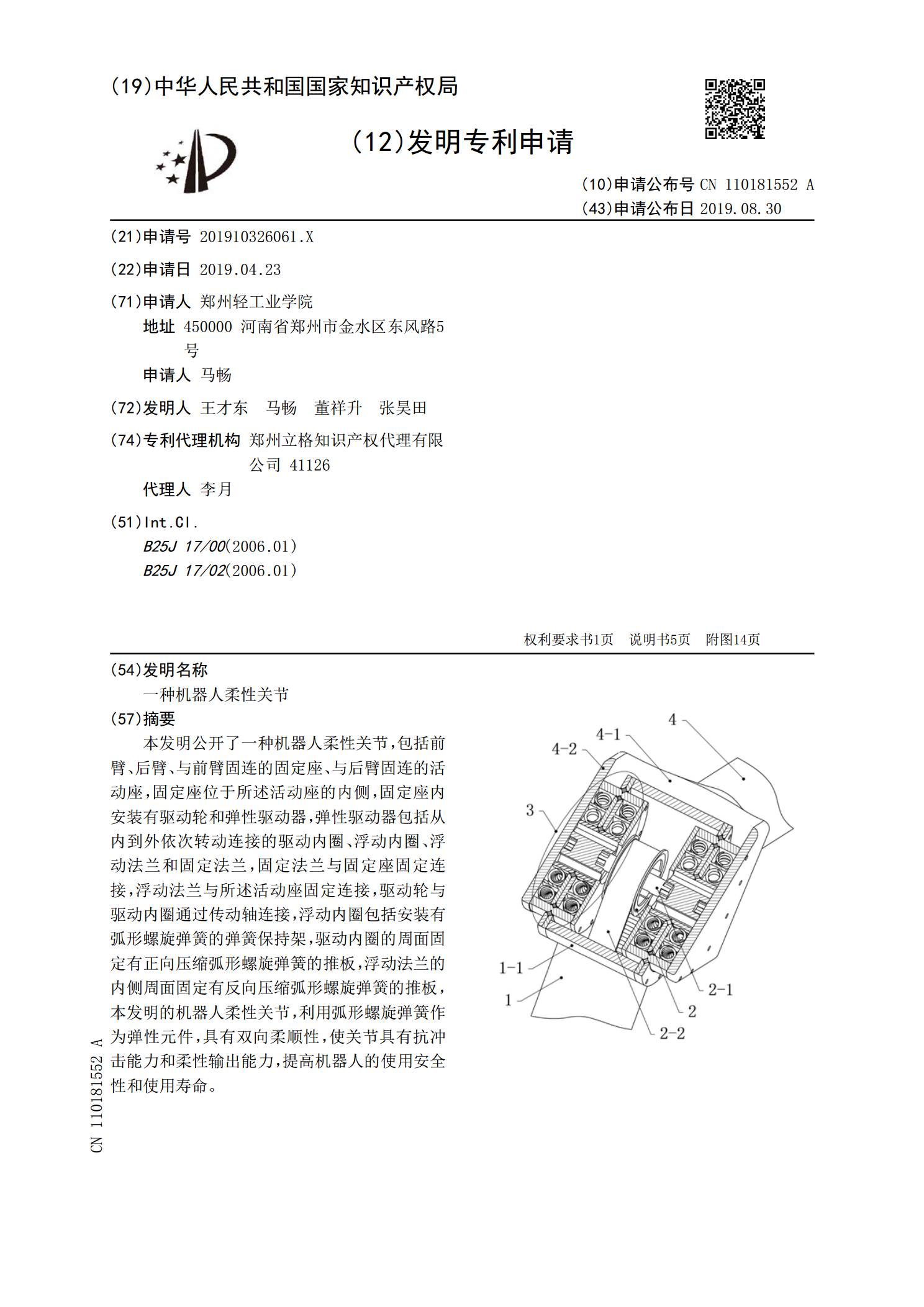
一种机器人柔性关节.pdf
本发明公开了一种机器人柔性关节,包括前臂、后臂、与前臂固连的固定座、与后臂固连的活动座,固定座位于所述活动座的内侧,固定座内安装有驱动轮和弹性驱动器,弹性驱动器包括从内到外依次转动连接的驱动内圈、浮动内圈、浮动法兰和固定法兰,固定法兰与固定座固定连接,浮动法兰与所述活动座固定连接,驱动轮与驱动内圈通过传动轴连接,浮动内圈包括安装有弧形螺旋弹簧的弹簧保持架,驱动内圈的周面固定有正向压缩弧形螺旋弹簧的推板,浮动法兰的内侧周面固定有反向压缩弧形螺旋弹簧的推板,本发明的机器人柔性关节,利用弧形螺旋弹簧作为弹性元件

人机交互协作机器人柔性驱动关节及其控制方法.pdf
本发明公开了人机交互协作机器人柔性驱动关节及其控制方法,属于机器人技术领域,本发明通过在第一关节一侧设置缓冲机构,缓冲机构使得第二关节在压缩和拉伸时得到缓冲,多个缓冲弹簧对第二关节的转动增加了柔性,同时起到保护和缓冲的作用,使得机器人关节具备一定的仿生能力,能够适应负载的变化,提高了机器人的安全性能,满足机器人的运动需要;通过在第一关节上设置限位机构,限位机构用于限制第二关节收缩和拉伸时,避免第二关节移动超过行程造成第一关节和第二关节的碰撞损伤,用户通过控制面板即可调节限位机构中限位杆的移动距离,同时用户

一种协作型机器人关节模块和协作机器人.pdf
本发明公开了一种协作型机器人关节模块和协作机器人,解决了现有机器人关节模块可伸缩范围有限、灵活性不够等问题,具有能够拾取多方位垃圾、拾取范围大、关节运动灵活的效果。其技术方案为:包括机械手臂,所述机械手臂安装于伸缩关节模块的一端,伸缩关节模块的另一端连接第一旋转模块;所述第一旋转模块通过直角关节模块安装于第二旋转模块上方,所述第二旋转模块底部固定移动型支座;其中,所述机械手臂包括能够多方向弯折的本体框架,所述本体框架固定有用于测量其运动过程中变形的应变传感器。
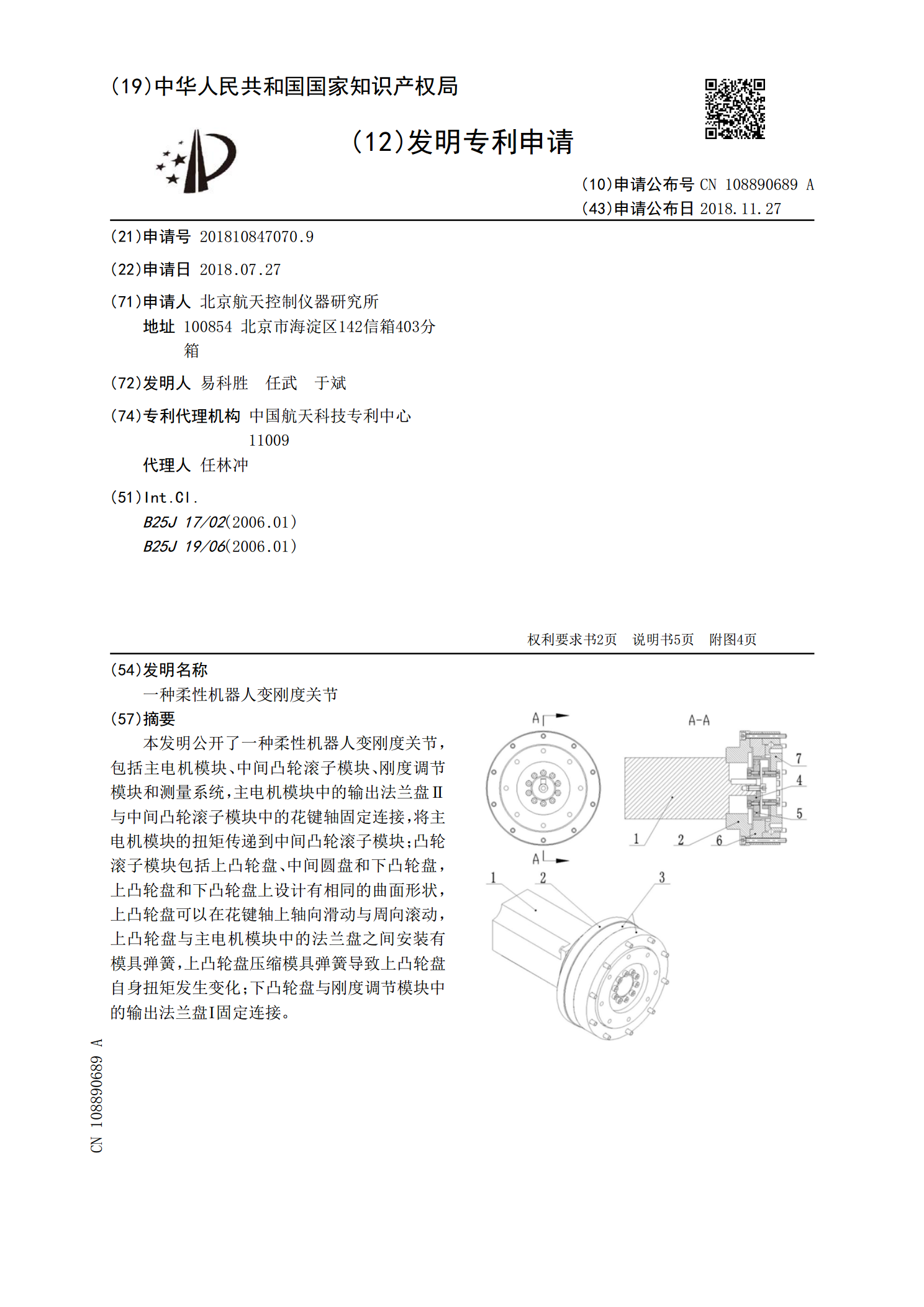
一种柔性机器人变刚度关节.pdf
本发明公开了一种柔性机器人变刚度关节,包括主电机模块、中间凸轮滚子模块、刚度调节模块和测量系统,主电机模块中的输出法兰盘Ⅱ与中间凸轮滚子模块中的花键轴固定连接,将主电机模块的扭矩传递到中间凸轮滚子模块;凸轮滚子模块包括上凸轮盘、中间圆盘和下凸轮盘,上凸轮盘和下凸轮盘上设计有相同的曲面形状,上凸轮盘可以在花键轴上轴向滑动与周向滚动,上凸轮盘与主电机模块中的法兰盘之间安装有模具弹簧,上凸轮盘压缩模具弹簧导致上凸轮盘自身扭矩发生变化;下凸轮盘与刚度调节模块中的输出法兰盘Ⅰ固定连接。