
车辆轨迹控制的方法、系统、计算机设备和可读存储介质.pdf

傲丝****账号


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆轨迹控制的方法、系统、计算机设备和可读存储介质.pdf
本申请涉及车辆轨迹控制的方法、系统、计算机设备和可读存储介质,其中,该车辆轨迹控制的方法包括:通过获取车辆的横向误差和航向误差,根据横向误差、航向误差和车辆的系统动力学参数,建立动力学空间模型,根据动力学空间模型建立系统状态空间方程;根据横向误差和车辆的车速,通过模糊控制系统,得到扰动矩阵;在系统状态空间方程中,引入扰动矩阵,得到修正系统状态空间方程,通过最优控制方法,根据修正系统状态空间方程计算车辆的期望前轮偏角,通过本申请,解决了相关技术中仅基于状态空间理论的控制器设计,在面对极限工况扰动时,车辆轨迹

行驶轨迹预测方法、车辆及计算机可读存储介质.pdf
本发明公开了一种行驶轨迹预测方法、车辆及计算机可读存储介质,所述行驶轨迹预测方法包括步骤:获取行驶目标在预设周期内的第一采样点,将所述第一采样点进行拟合,得到目标轨迹曲线;获取预设数量的道路采集点,将所述道路采集点进行拟合,得到道路轨迹曲线;获取车辆行驶数据,根据所述行驶数据得到行驶轨迹曲线;根据所述有效目标轨迹曲线、所述有效道路轨迹曲线和所述行驶轨迹曲线预测目标行驶轨迹曲线。本发明提高了车辆行驶轨迹预测的准确性。
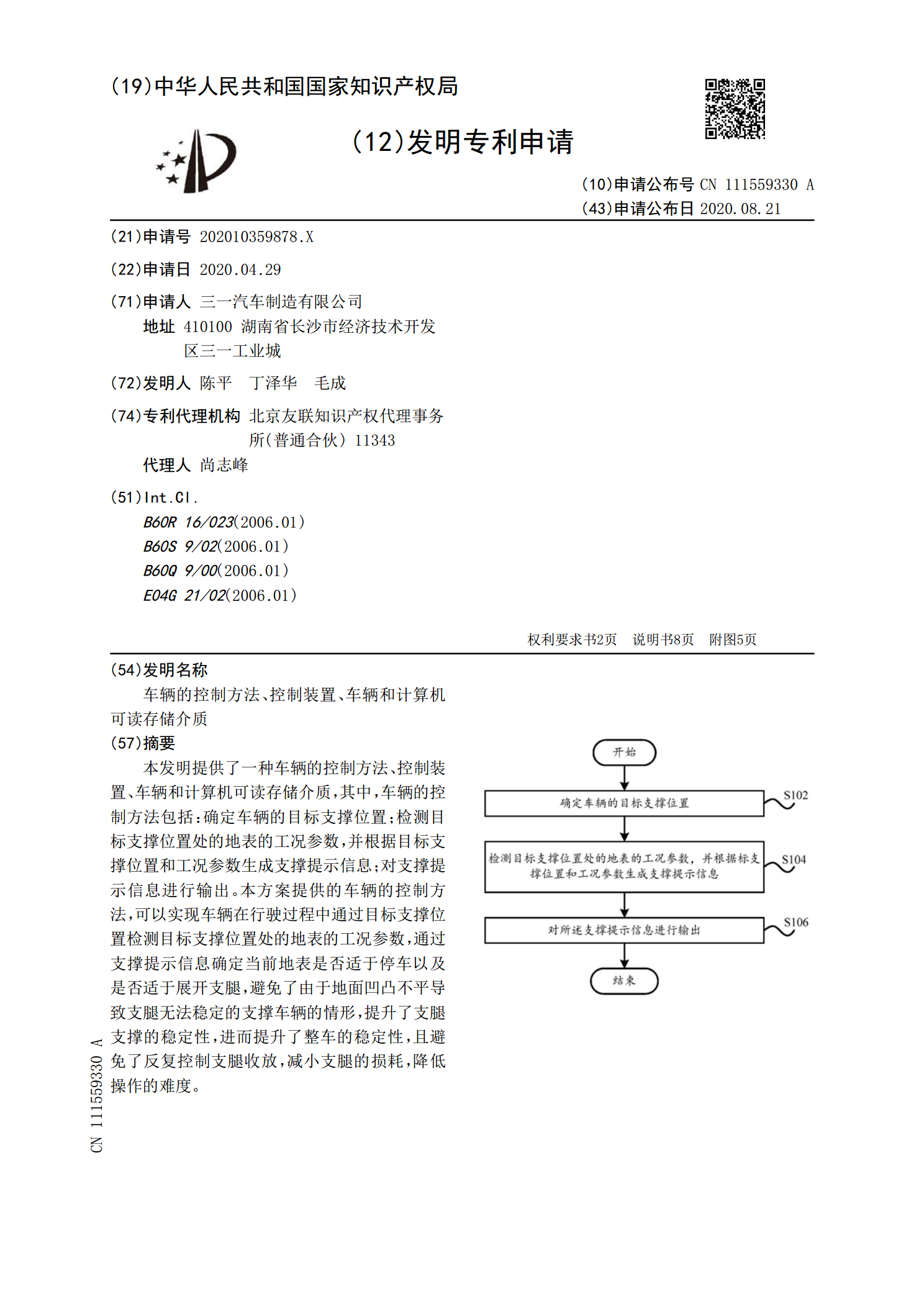
车辆的控制方法、控制装置、车辆和计算机可读存储介质.pdf
本发明提供了一种车辆的控制方法、控制装置、车辆和计算机可读存储介质,其中,车辆的控制方法包括:确定车辆的目标支撑位置;检测目标支撑位置处的地表的工况参数,并根据目标支撑位置和工况参数生成支撑提示信息;对支撑提示信息进行输出。本方案提供的车辆的控制方法,可以实现车辆在行驶过程中通过目标支撑位置检测目标支撑位置处的地表的工况参数,通过支撑提示信息确定当前地表是否适于停车以及是否适于展开支腿,避免了由于地面凹凸不平导致支腿无法稳定的支撑车辆的情形,提升了支腿支撑的稳定性,进而提升了整车的稳定性,且避免了反复控制
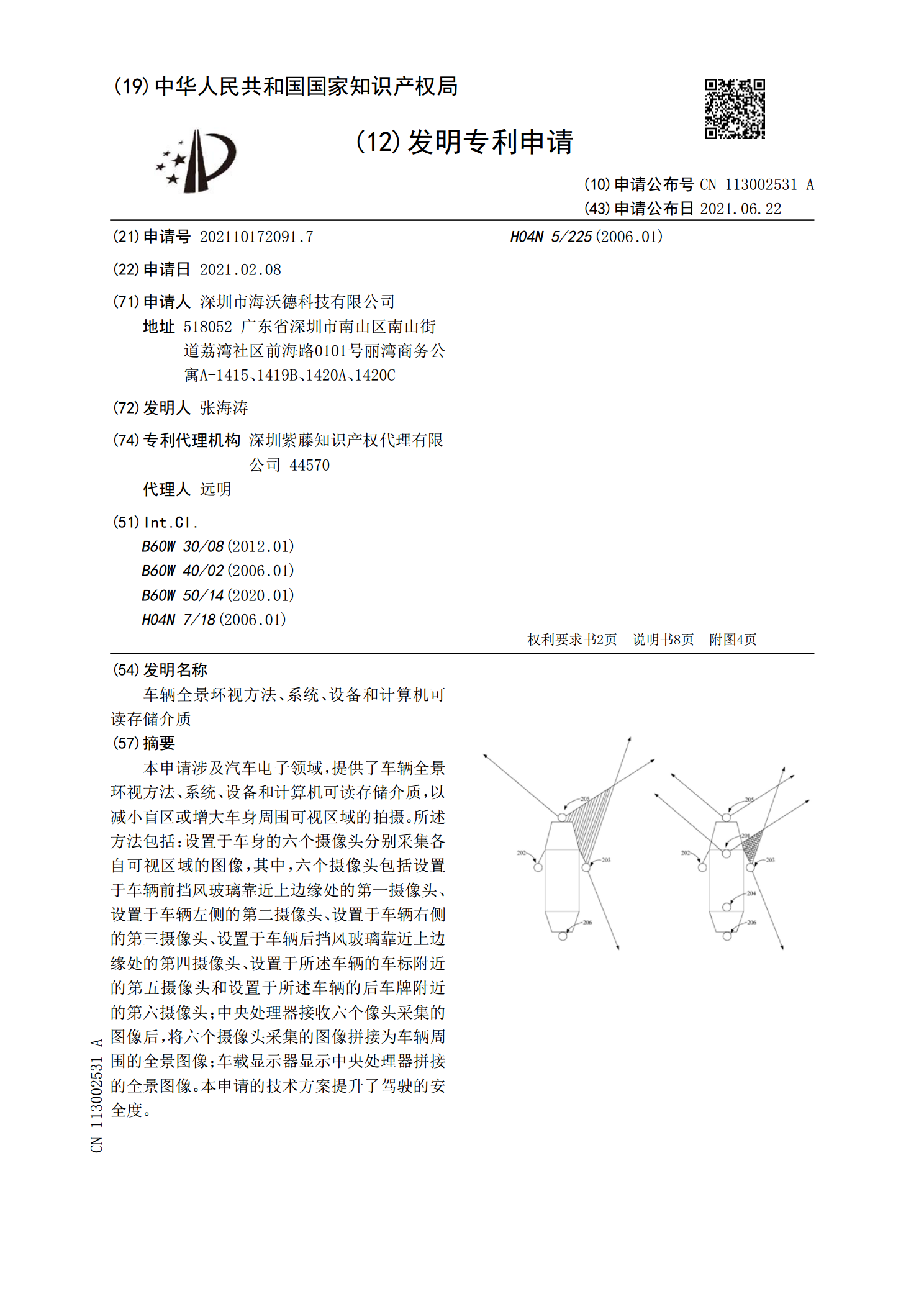
车辆全景环视方法、系统、设备和计算机可读存储介质.pdf
本申请涉及汽车电子领域,提供了车辆全景环视方法、系统、设备和计算机可读存储介质,以减小盲区或增大车身周围可视区域的拍摄。所述方法包括:设置于车身的六个摄像头分别采集各自可视区域的图像,其中,六个摄像头包括设置于车辆前挡风玻璃靠近上边缘处的第一摄像头、设置于车辆左侧的第二摄像头、设置于车辆右侧的第三摄像头、设置于车辆后挡风玻璃靠近上边缘处的第四摄像头、设置于所述车辆的车标附近的第五摄像头和设置于所述车辆的后车牌附近的第六摄像头;中央处理器接收六个像头采集的图像后,将六个摄像头采集的图像拼接为车辆周围的全景图
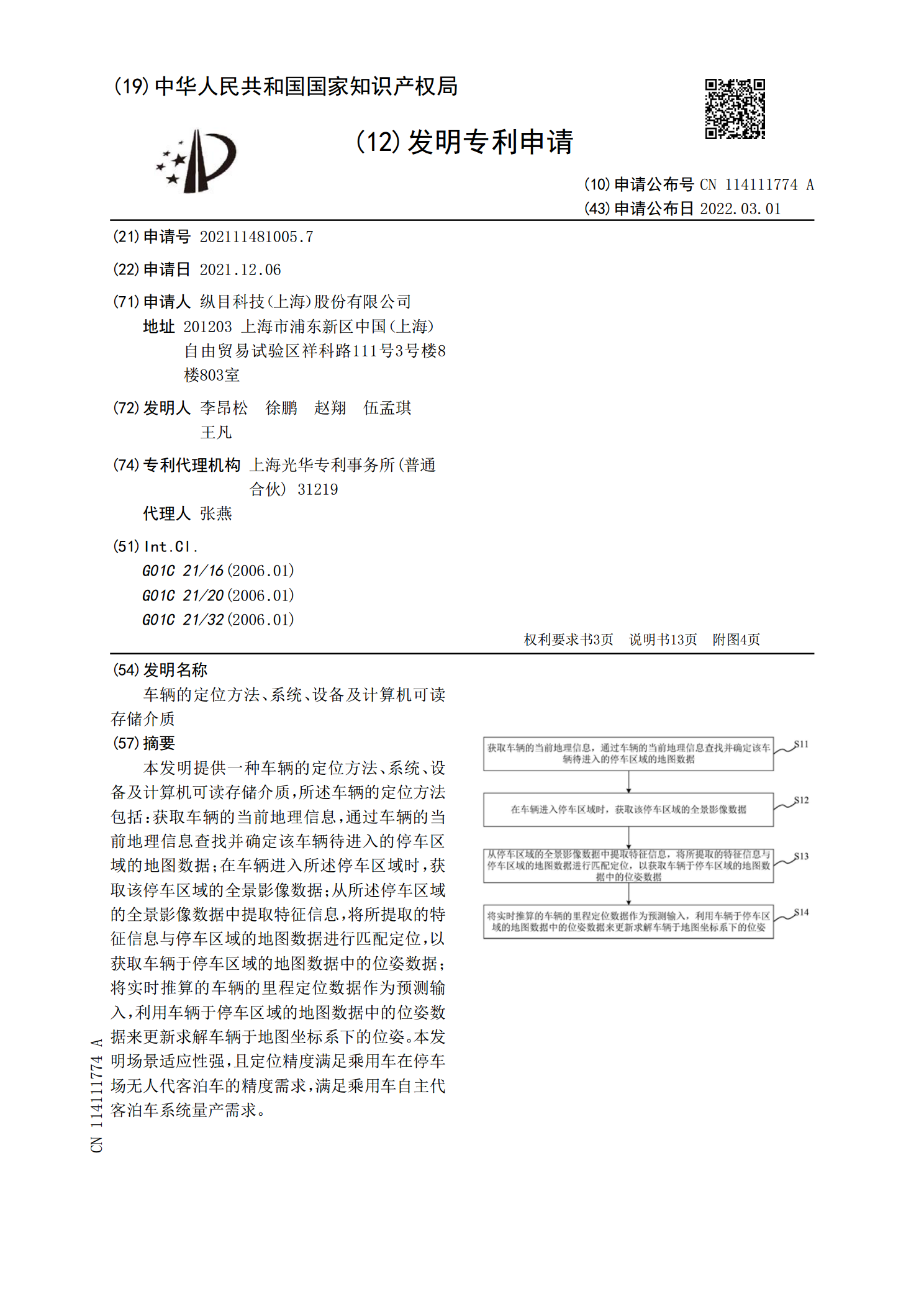
车辆的定位方法、系统、设备及计算机可读存储介质.pdf
本发明提供一种车辆的定位方法、系统、设备及计算机可读存储介质,所述车辆的定位方法包括:获取车辆的当前地理信息,通过车辆的当前地理信息查找并确定该车辆待进入的停车区域的地图数据;在车辆进入所述停车区域时,获取该停车区域的全景影像数据;从所述停车区域的全景影像数据中提取特征信息,将所提取的特征信息与停车区域的地图数据进行匹配定位,以获取车辆于停车区域的地图数据中的位姿数据;将实时推算的车辆的里程定位数据作为预测输入,利用车辆于停车区域的地图数据中的位姿数据来更新求解车辆于地图坐标系下的位姿。本发明场景适应性强