
车辆的定位方法、系统、设备及计算机可读存储介质.pdf

玉怡****文档


1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆的定位方法、系统、设备及计算机可读存储介质.pdf
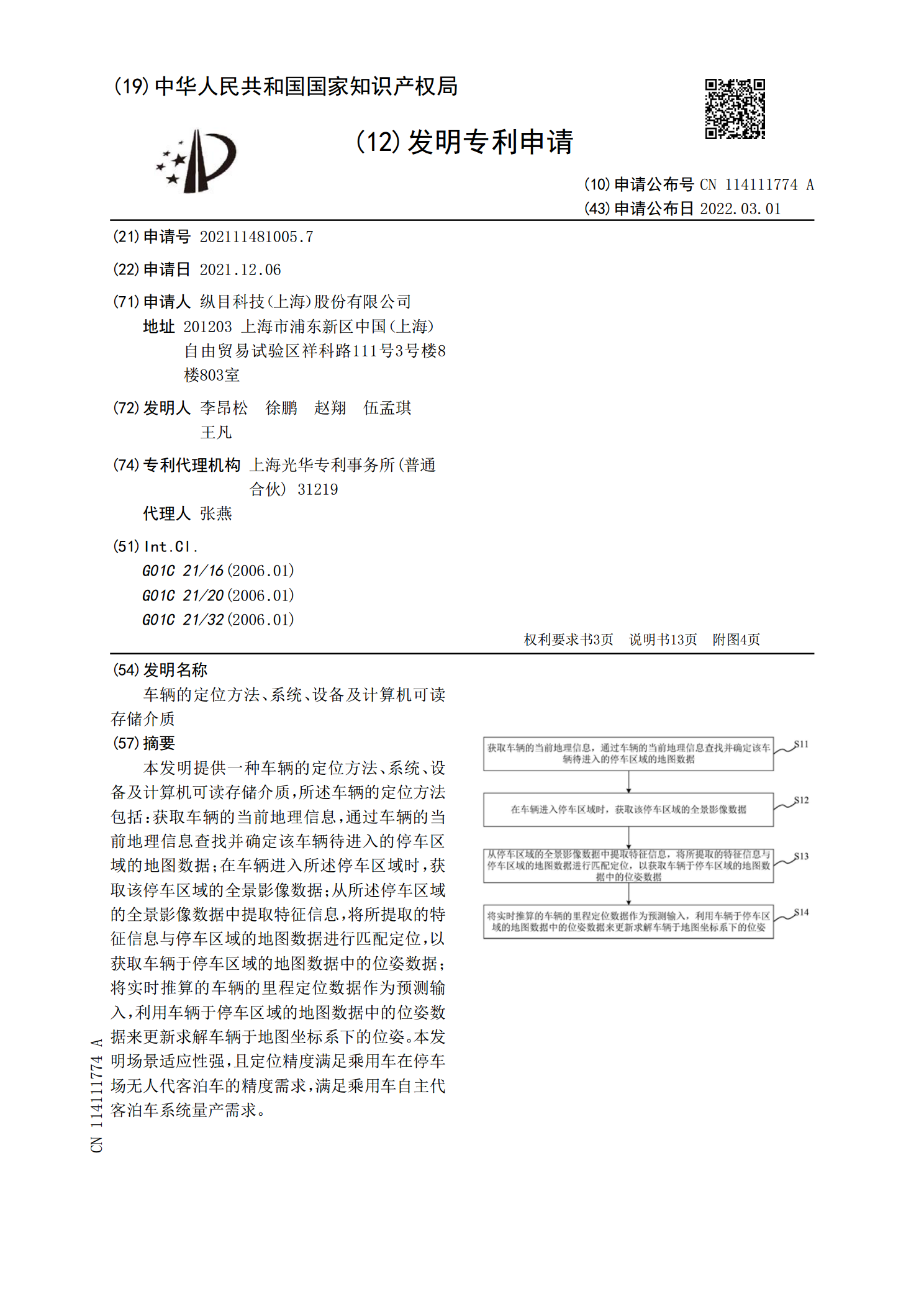
本发明提供一种车辆的定位方法、系统、设备及计算机可读存储介质,所述车辆的定位方法包括:获取车辆的当前地理信息,通过车辆的当前地理信息查找并确定该车辆待进入的停车区域的地图数据;在车辆进入所述停车区域时,获取该停车区域的全景影像数据;从所述停车区域的全景影像数据中提取特征信息,将所提取的特征信息与停车区域的地图数据进行匹配定位,以获取车辆于停车区域的地图数据中的位姿数据;将实时推算的车辆的里程定位数据作为预测输入,利用车辆于停车区域的地图数据中的位姿数据来更新求解车辆于地图坐标系下的位姿。本发明场景适应性强

车辆的定位方法、系统、设备及计算机可读存储介质.pdf
本发明提供一种车辆的定位方法、系统、设备及计算机可读存储介质,定位方法包括:实时获取车辆于多个时刻的位姿;将实时获取的多个时刻的位姿定义为观测数据依次接收至预先构建的校正模型,其中,预设校正模型包括若干用于预测车辆位姿的滤波器;在当前时刻预先构建的校正模型接收到第i+1个观测数据时,对前i个滤波器分别进行融合检测,若前i个滤波器中的滤波器检测通过,则利用第i+1个观测数据,更新检测通过的滤波器,并提取出校正后的车辆于当前时刻的位姿;第i+1个观测数据非第一个观测数据。本发明适用于任何有车位号的停车场,且通
定位方法、定位设备、车辆以及计算机可读存储介质.pdf
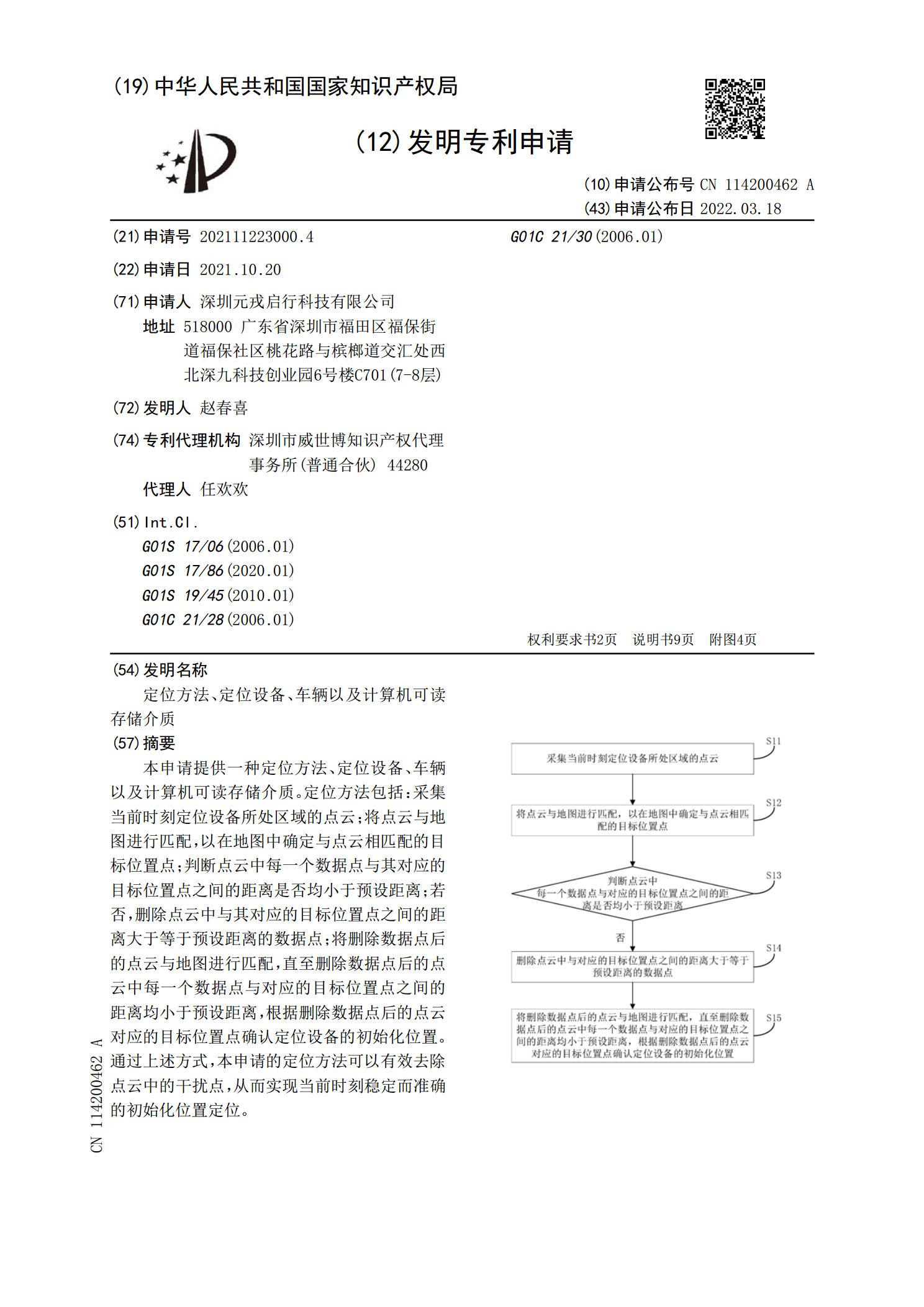
本申请提供一种定位方法、定位设备、车辆以及计算机可读存储介质。定位方法包括:采集当前时刻定位设备所处区域的点云;将点云与地图进行匹配,以在地图中确定与点云相匹配的目标位置点;判断点云中每一个数据点与其对应的目标位置点之间的距离是否均小于预设距离;若否,删除点云中与其对应的目标位置点之间的距离大于等于预设距离的数据点;将删除数据点后的点云与地图进行匹配,直至删除数据点后的点云中每一个数据点与对应的目标位置点之间的距离均小于预设距离,根据删除数据点后的点云对应的目标位置点确认定位设备的初始化位置。通过上述方式
车道定位方法、计算机设备、计算机可读存储介质及车辆.pdf
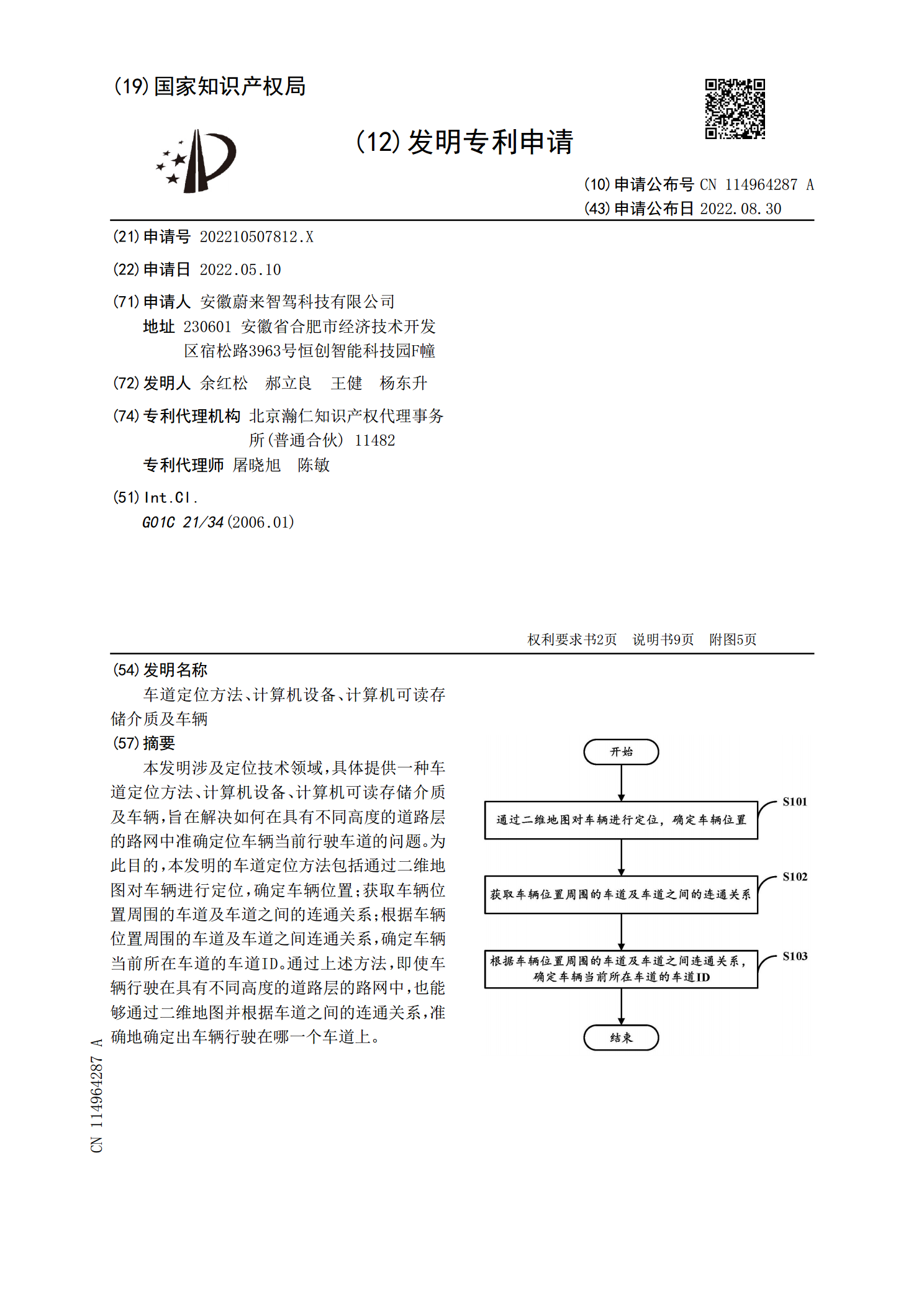
本发明涉及定位技术领域,具体提供一种车道定位方法、计算机设备、计算机可读存储介质及车辆,旨在解决如何在具有不同高度的道路层的路网中准确定位车辆当前行驶车道的问题。为此目的,本发明的车道定位方法包括通过二维地图对车辆进行定位,确定车辆位置;获取车辆位置周围的车道及车道之间的连通关系;根据车辆位置周围的车道及车道之间连通关系,确定车辆当前所在车道的车道ID。通过上述方法,即使车辆行驶在具有不同高度的道路层的路网中,也能够通过二维地图并根据车道之间的连通关系,准确地确定出车辆行驶在哪一个车道上。
一种车辆视觉定位方法、系统、设备及可读存储介质.pdf
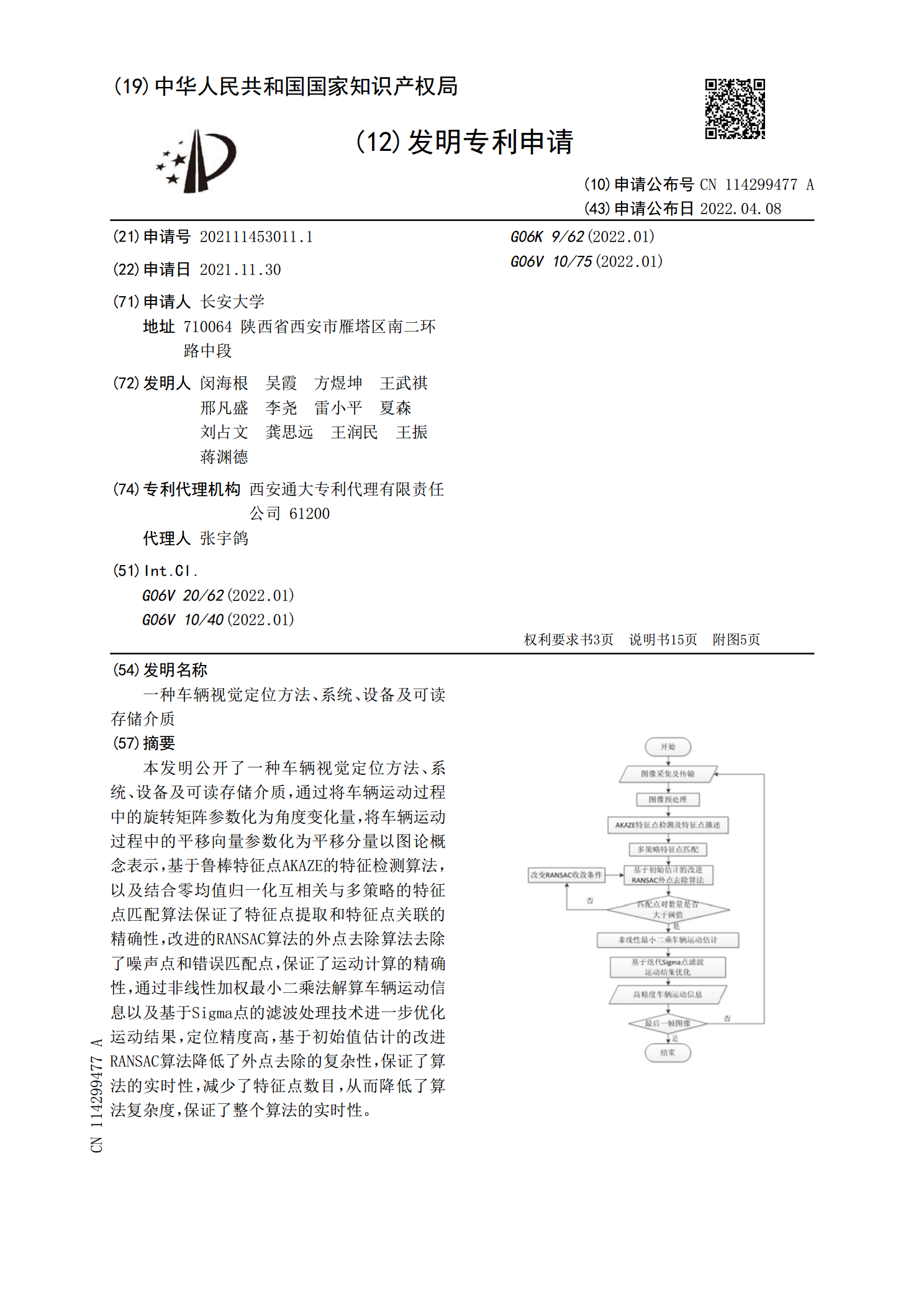
本发明公开了一种车辆视觉定位方法、系统、设备及可读存储介质,通过将车辆运动过程中的旋转矩阵参数化为角度变化量,将车辆运动过程中的平移向量参数化为平移分量以图论概念表示,基于鲁棒特征点AKAZE的特征检测算法,以及结合零均值归一化互相关与多策略的特征点匹配算法保证了特征点提取和特征点关联的精确性,改进的RANSAC算法的外点去除算法去除了噪声点和错误匹配点,保证了运动计算的精确性,通过非线性加权最小二乘法解算车辆运动信息以及基于Sigma点的滤波处理技术进一步优化运动结果,定位精度高,基于初始值估计的改进R