
一种工业机器人用机械手结构.pdf

是秋****写意

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种工业机器人用机械手结构.pdf
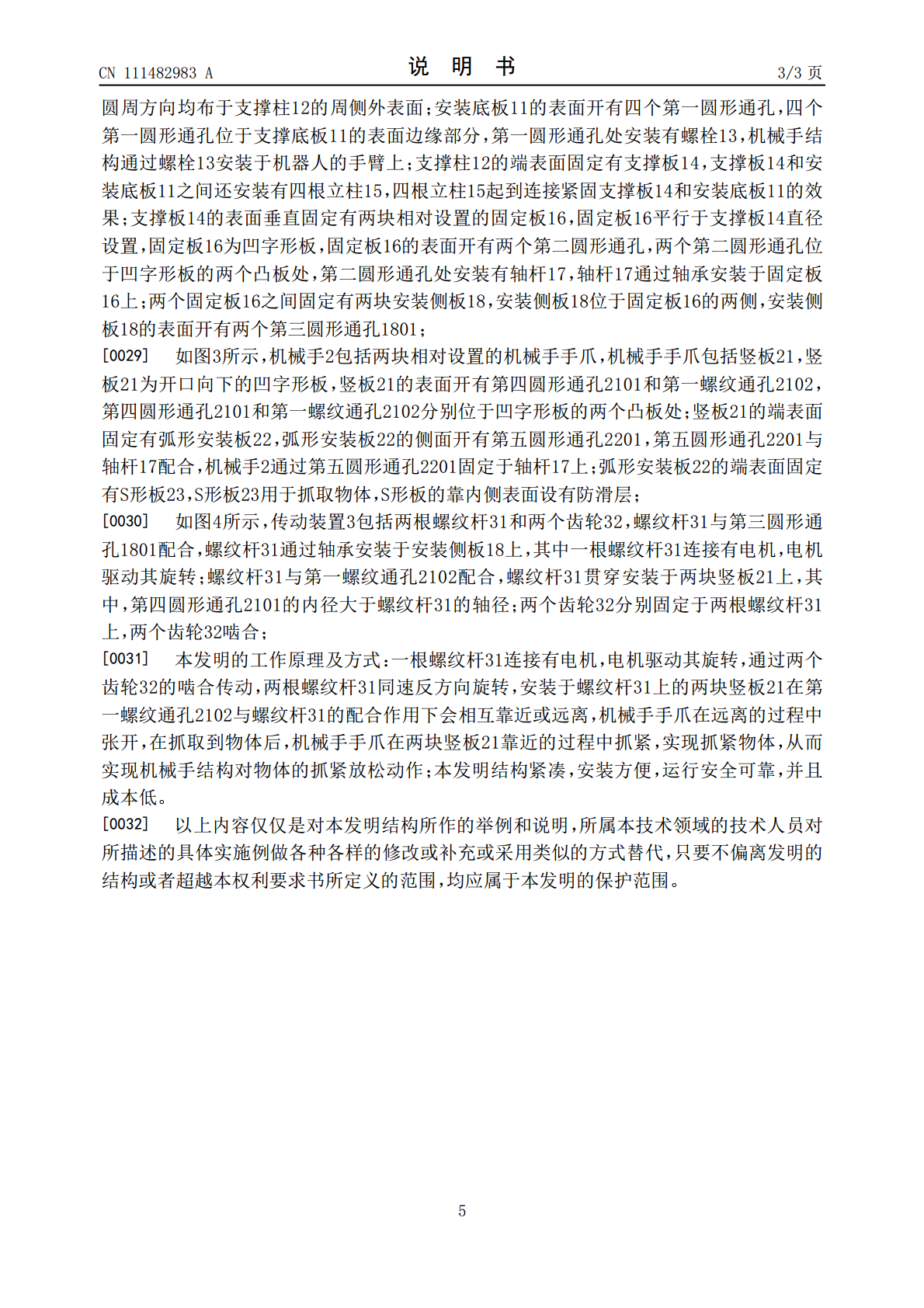
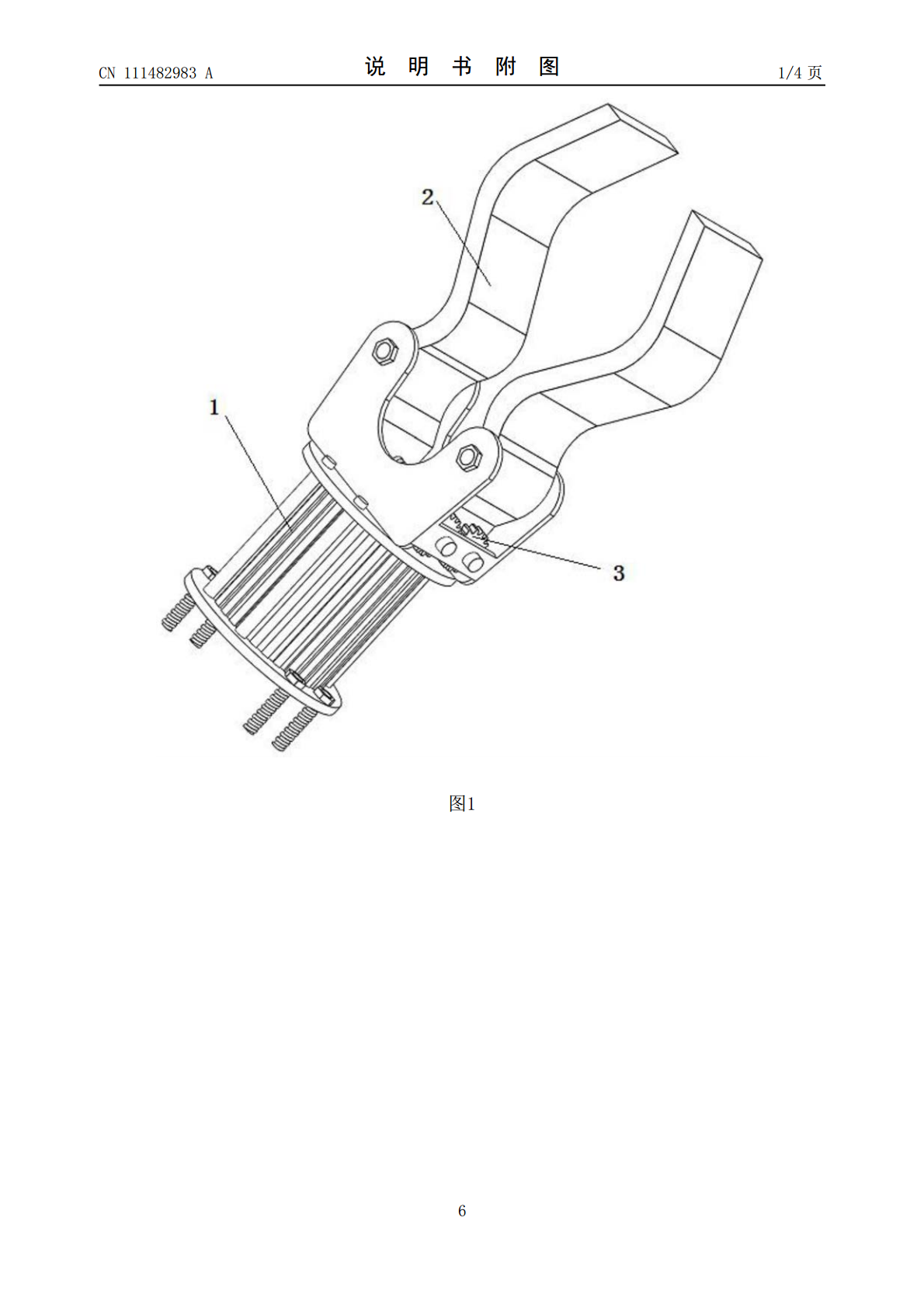
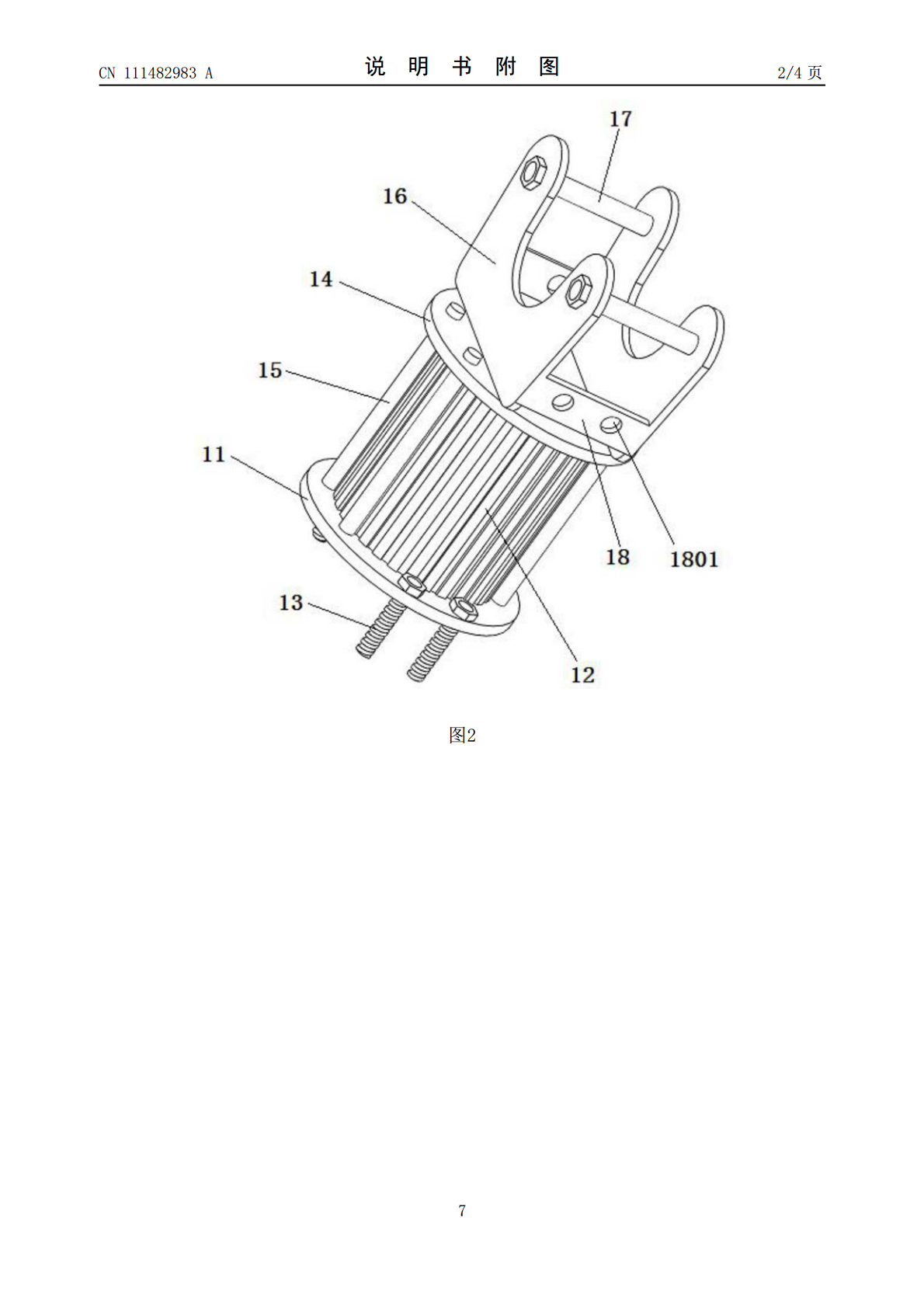
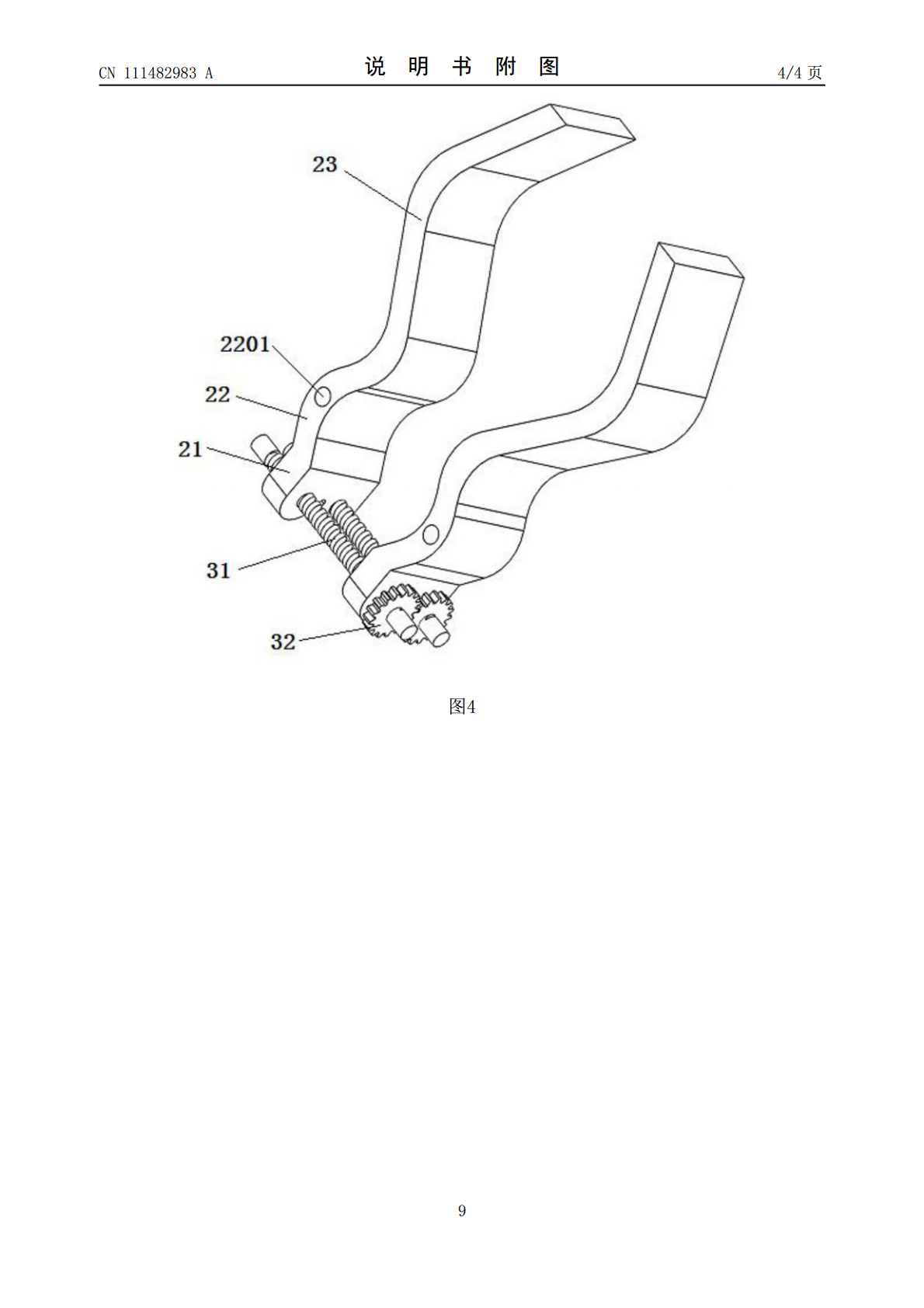
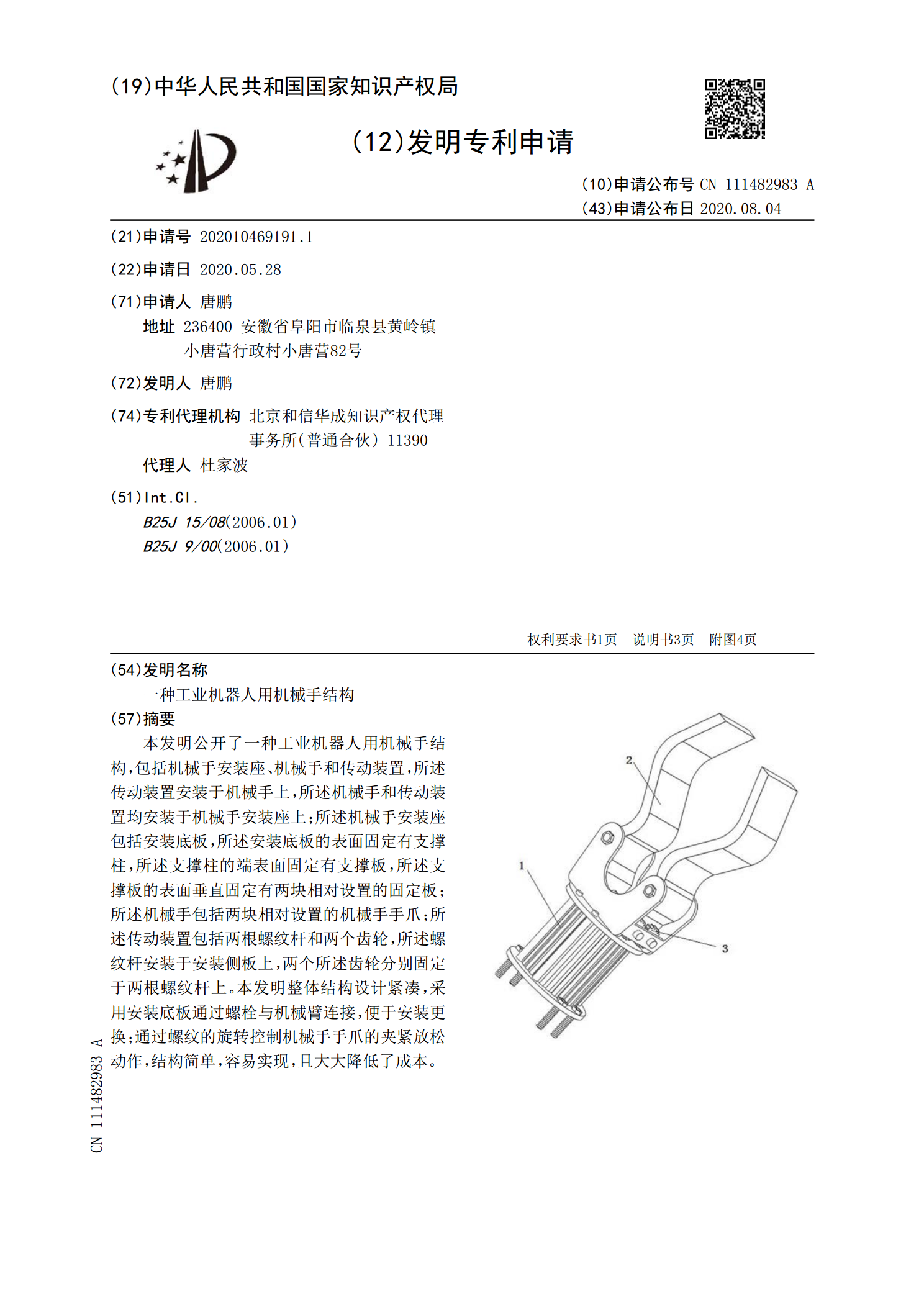
本发明公开了一种工业机器人用机械手结构,包括机械手安装座、机械手和传动装置,所述传动装置安装于机械手上,所述机械手和传动装置均安装于机械手安装座上;所述机械手安装座包括安装底板,所述安装底板的表面固定有支撑柱,所述支撑柱的端表面固定有支撑板,所述支撑板的表面垂直固定有两块相对设置的固定板;所述机械手包括两块相对设置的机械手手爪;所述传动装置包括两根螺纹杆和两个齿轮,所述螺纹杆安装于安装侧板上,两个所述齿轮分别固定于两根螺纹杆上。本发明整体结构设计紧凑,采用安装底板通过螺栓与机械臂连接,便于安装更换;通过螺
一种工业机器人用故障诊断结构.pdf
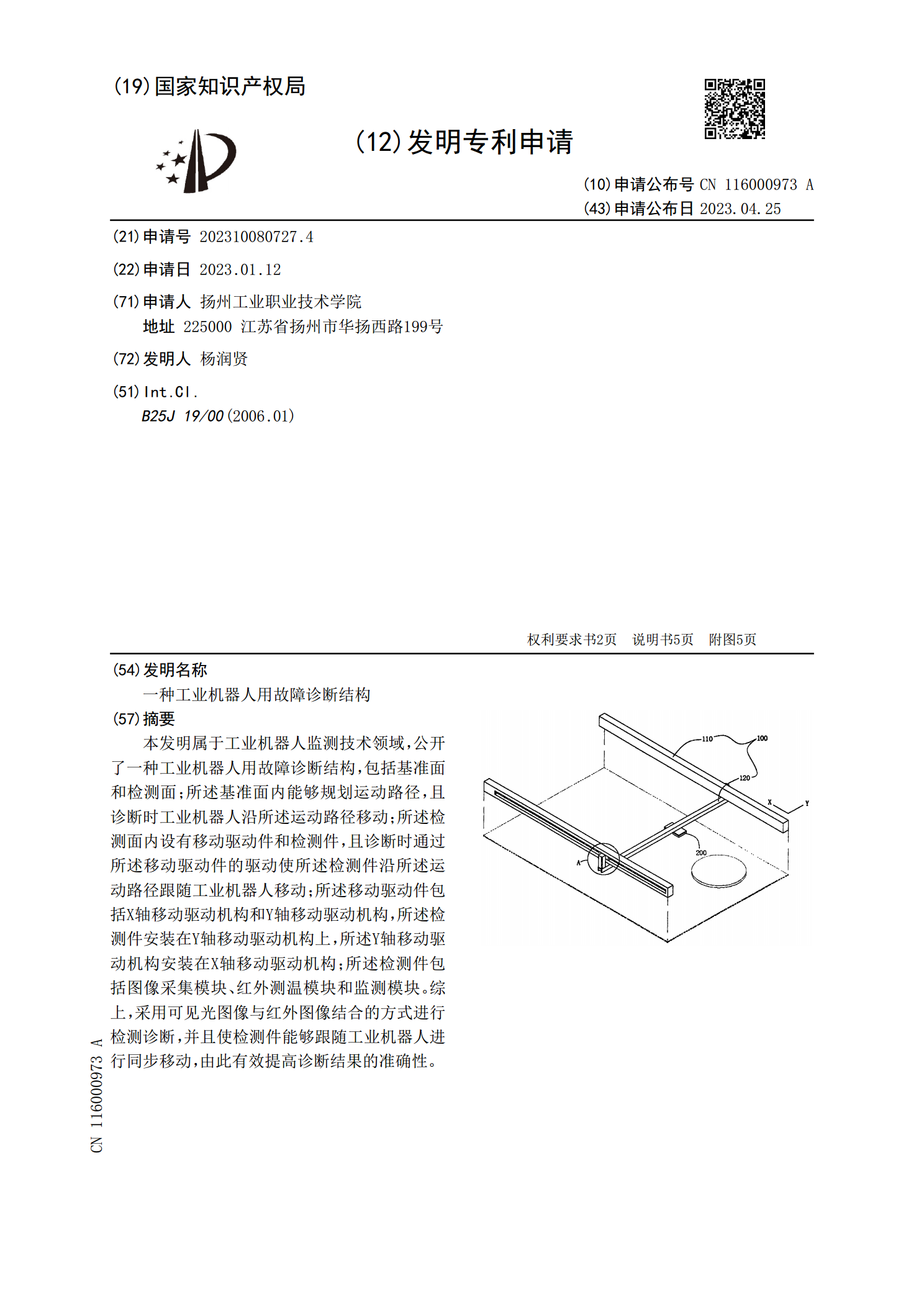
本发明属于工业机器人监测技术领域,公开了一种工业机器人用故障诊断结构,包括基准面和检测面;所述基准面内能够规划运动路径,且诊断时工业机器人沿所述运动路径移动;所述检测面内设有移动驱动件和检测件,且诊断时通过所述移动驱动件的驱动使所述检测件沿所述运动路径跟随工业机器人移动;所述移动驱动件包括X轴移动驱动机构和Y轴移动驱动机构,所述检测件安装在Y轴移动驱动机构上,所述Y轴移动驱动机构安装在X轴移动驱动机构;所述检测件包括图像采集模块、红外测温模块和监测模块。综上,采用可见光图像与红外图像结合的方式进行检测诊断
一种工业用机械手.pdf
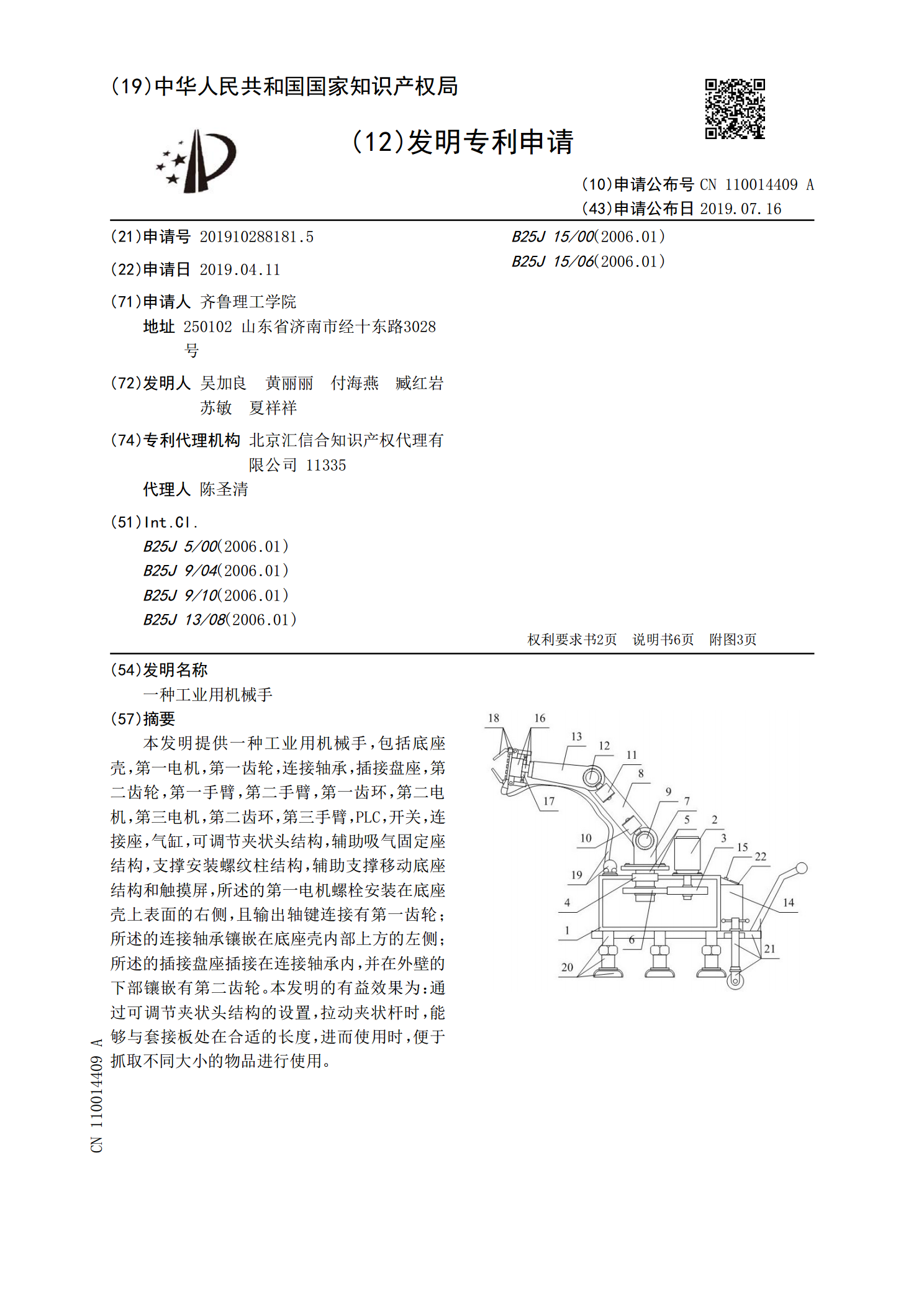
本发明提供一种工业用机械手,包括底座壳,第一电机,第一齿轮,连接轴承,插接盘座,第二齿轮,第一手臂,第二手臂,第一齿环,第二电机,第三电机,第二齿环,第三手臂,PLC,开关,连接座,气缸,可调节夹状头结构,辅助吸气固定座结构,支撑安装螺纹柱结构,辅助支撑移动底座结构和触摸屏,所述的第一电机螺栓安装在底座壳上表面的右侧,且输出轴键连接有第一齿轮;所述的连接轴承镶嵌在底座壳内部上方的左侧;所述的插接盘座插接在连接轴承内,并在外壁的下部镶嵌有第二齿轮。本发明的有益效果为:通过可调节夹状头结构的设置,拉动夹状杆时
一种工业用智能机器人仿生机械手抓取设备.pdf
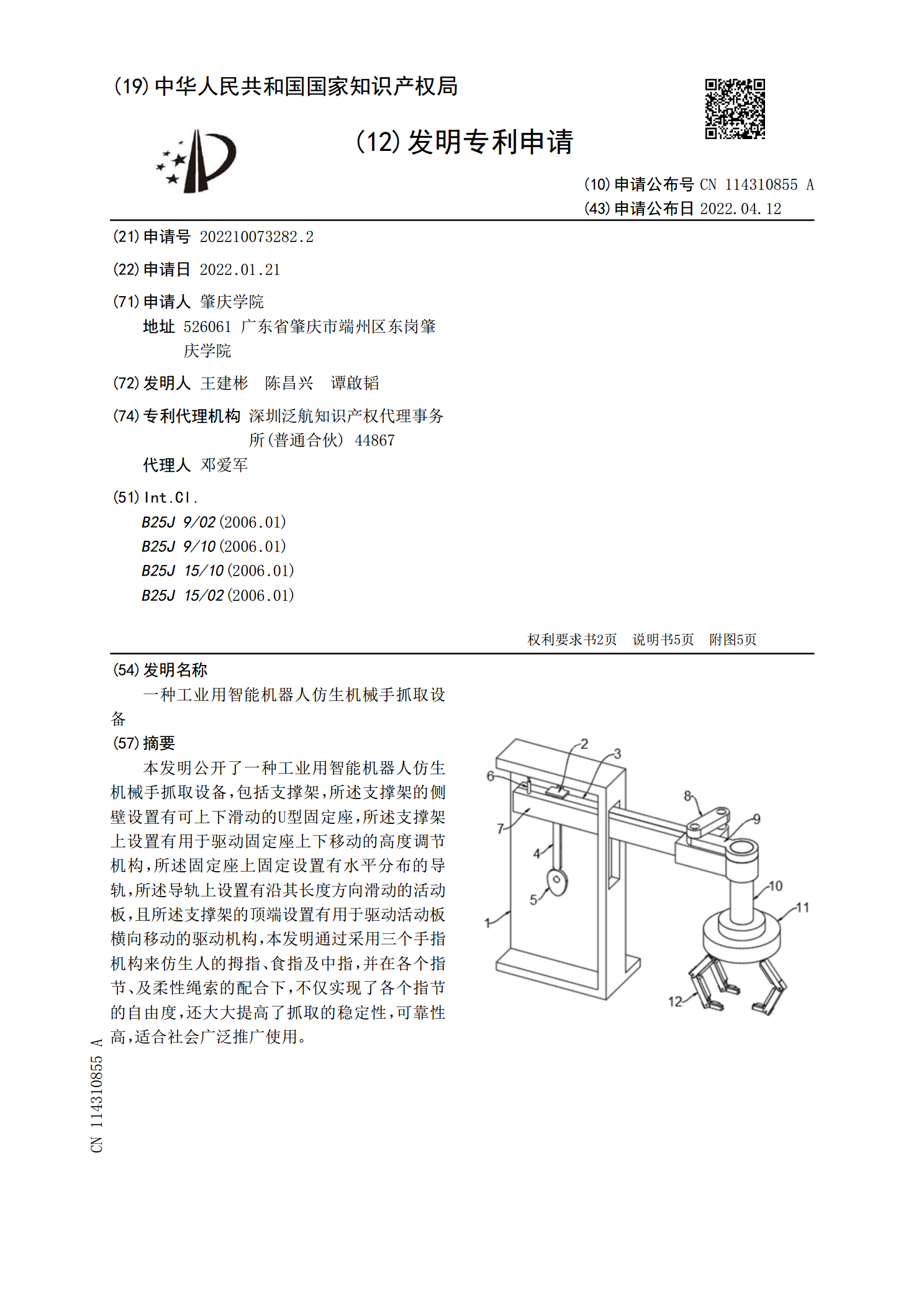
本发明公开了一种工业用智能机器人仿生机械手抓取设备,包括支撑架,所述支撑架的侧壁设置有可上下滑动的U型固定座,所述支撑架上设置有用于驱动固定座上下移动的高度调节机构,所述固定座上固定设置有水平分布的导轨,所述导轨上设置有沿其长度方向滑动的活动板,且所述支撑架的顶端设置有用于驱动活动板横向移动的驱动机构,本发明通过采用三个手指机构来仿生人的拇指、食指及中指,并在各个指节、及柔性绳索的配合下,不仅实现了各个指节的自由度,还大大提高了抓取的稳定性,可靠性高,适合社会广泛推广使用。

一种工业用智能机器人仿生机械手抓取设备.pdf
本发明涉及机器人部件制造技术领域,且公开了一种工业用智能机器人仿生机械手抓取设备,包括仿生套,所述仿生套的内部活动连接有支撑架,支撑架的上部固定连接有通风管,通风管远离支撑架的一端活动连接有扇叶杆,扇叶杆的两侧滑动连接有抽吸管道,抽吸管道的上部活动连接有转盘,转盘远离抽吸管道的一侧活动连接有拾取机构。对物品进行抓取,手指弯曲的同时会带动扇叶杆在抽吸管道内进行滑动,因手指弯曲会将仿生套内的气流向中心位置挤压,气流带动扇叶进行旋转,扇叶产生的气流会吹拂至拾取机构表面,后通过中空通道流出,流动至拾取的部件表面,