
一种工业用智能机器人仿生机械手抓取设备.pdf

小宏****aa


1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种工业用智能机器人仿生机械手抓取设备.pdf
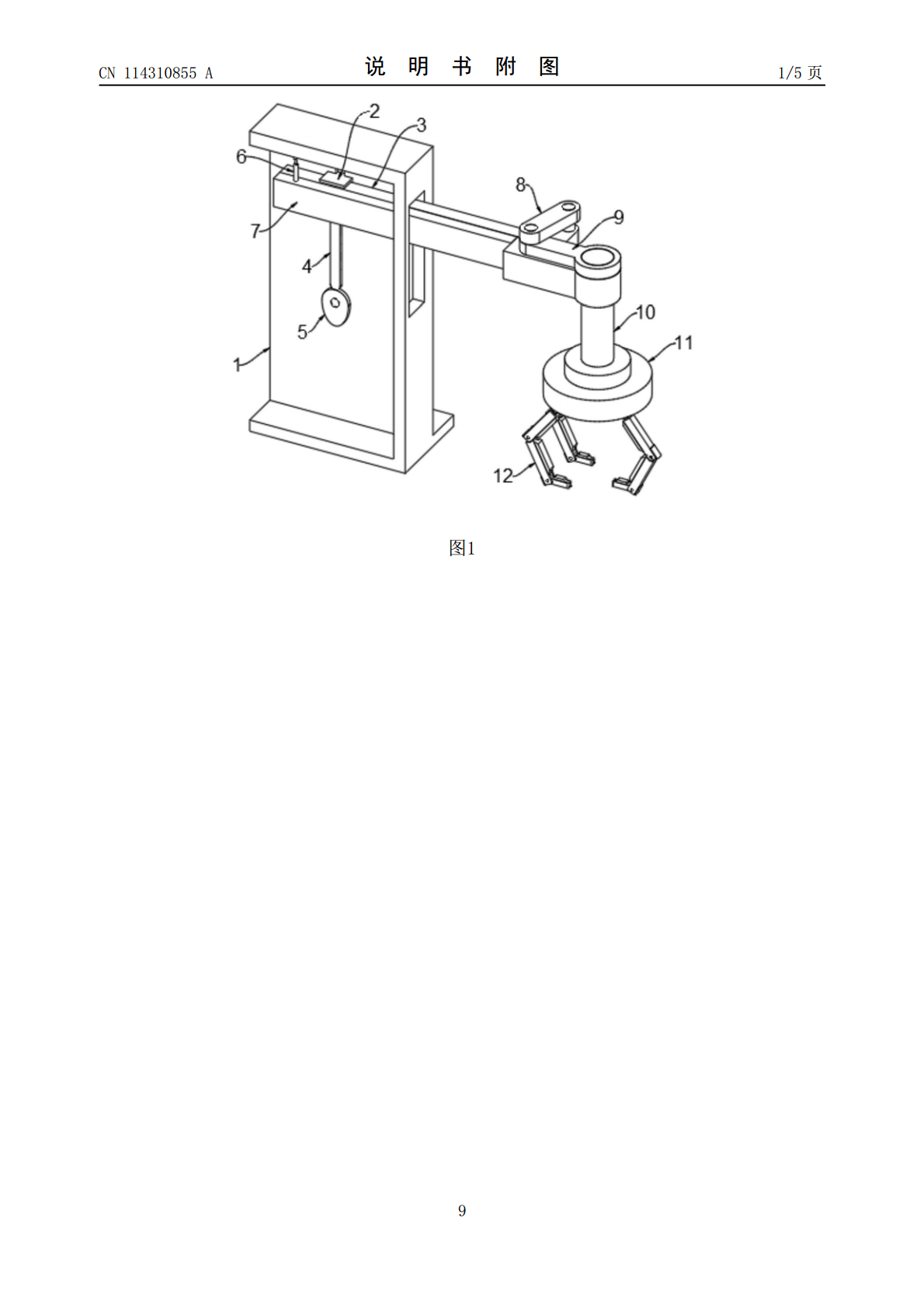
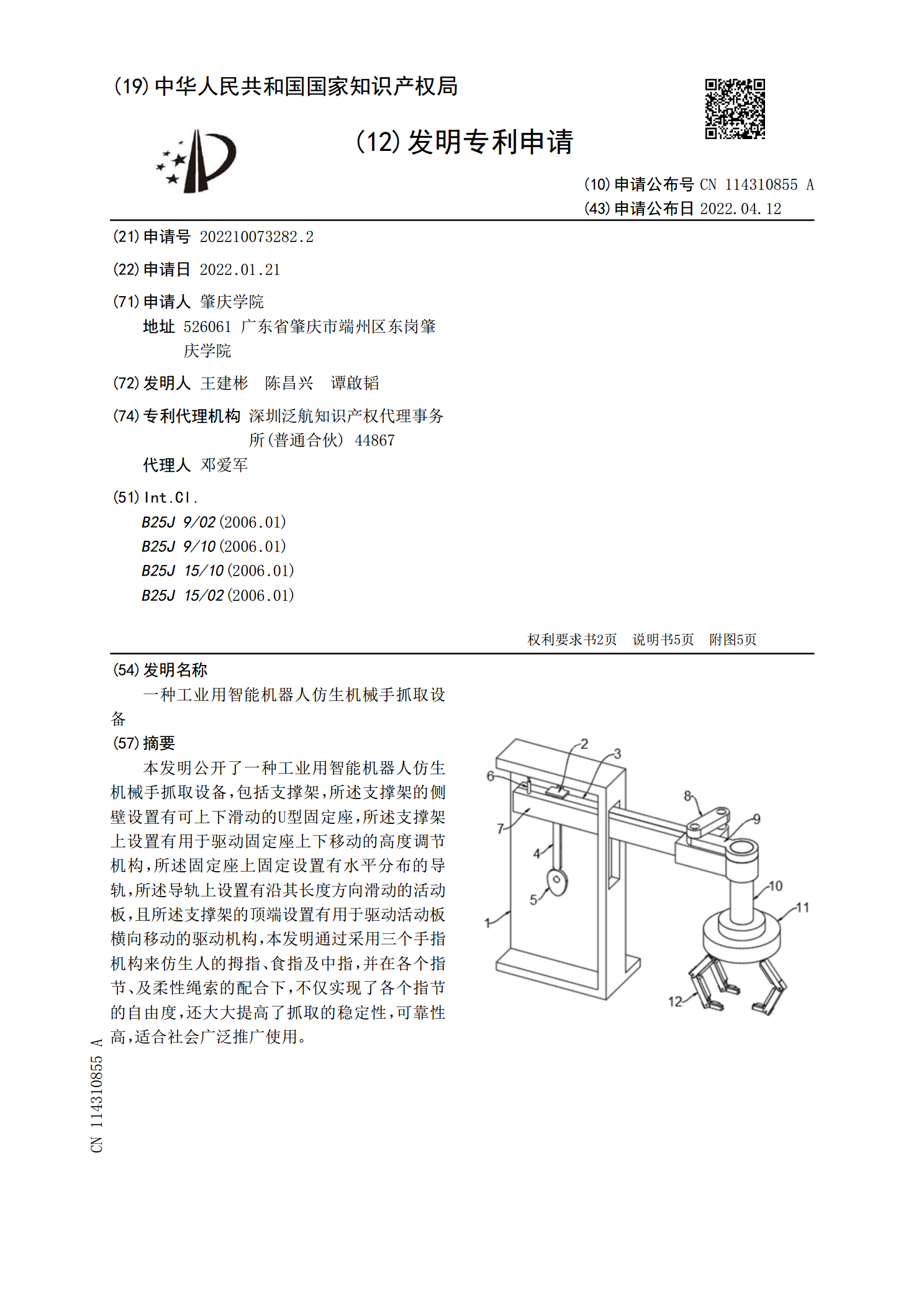
本发明公开了一种工业用智能机器人仿生机械手抓取设备,包括支撑架,所述支撑架的侧壁设置有可上下滑动的U型固定座,所述支撑架上设置有用于驱动固定座上下移动的高度调节机构,所述固定座上固定设置有水平分布的导轨,所述导轨上设置有沿其长度方向滑动的活动板,且所述支撑架的顶端设置有用于驱动活动板横向移动的驱动机构,本发明通过采用三个手指机构来仿生人的拇指、食指及中指,并在各个指节、及柔性绳索的配合下,不仅实现了各个指节的自由度,还大大提高了抓取的稳定性,可靠性高,适合社会广泛推广使用。

一种工业用智能机器人仿生机械手抓取设备.pdf
本发明涉及机器人部件制造技术领域,且公开了一种工业用智能机器人仿生机械手抓取设备,包括仿生套,所述仿生套的内部活动连接有支撑架,支撑架的上部固定连接有通风管,通风管远离支撑架的一端活动连接有扇叶杆,扇叶杆的两侧滑动连接有抽吸管道,抽吸管道的上部活动连接有转盘,转盘远离抽吸管道的一侧活动连接有拾取机构。对物品进行抓取,手指弯曲的同时会带动扇叶杆在抽吸管道内进行滑动,因手指弯曲会将仿生套内的气流向中心位置挤压,气流带动扇叶进行旋转,扇叶产生的气流会吹拂至拾取机构表面,后通过中空通道流出,流动至拾取的部件表面,
一种工业机器人用产品抓取装置.pdf
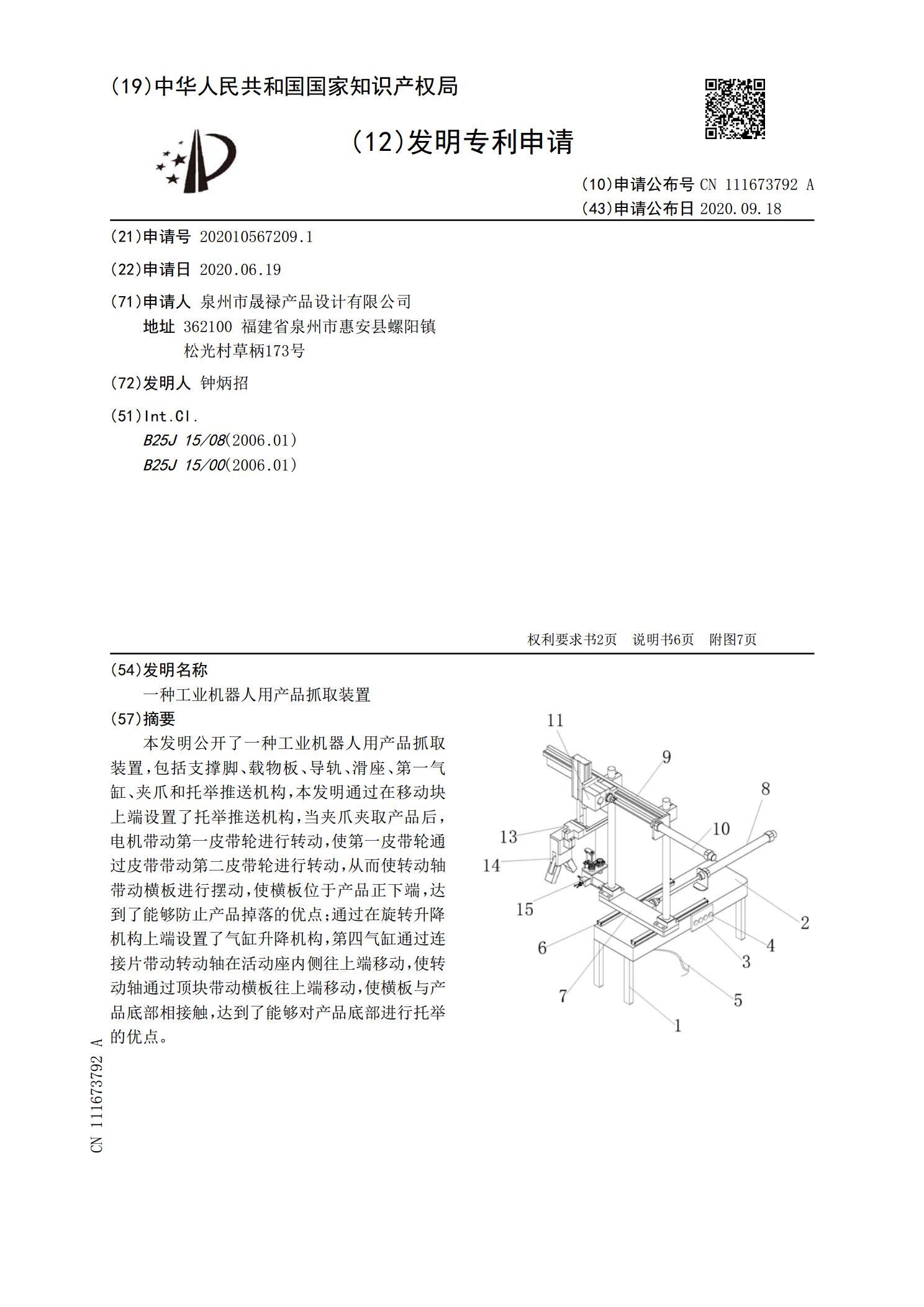
本发明公开了一种工业机器人用产品抓取装置,包括支撑脚、载物板、导轨、滑座、第一气缸、夹爪和托举推送机构,本发明通过在移动块上端设置了托举推送机构,当夹爪夹取产品后,电机带动第一皮带轮进行转动,使第一皮带轮通过皮带带动第二皮带轮进行转动,从而使转动轴带动横板进行摆动,使横板位于产品正下端,达到了能够防止产品掉落的优点;通过在旋转升降机构上端设置了气缸升降机构,第四气缸通过连接片带动转动轴在活动座内侧往上端移动,使转动轴通过顶块带动横板往上端移动,使横板与产品底部相接触,达到了能够对产品底部进行托举的优点。
一种工业机器人用机械抓取装置.pdf
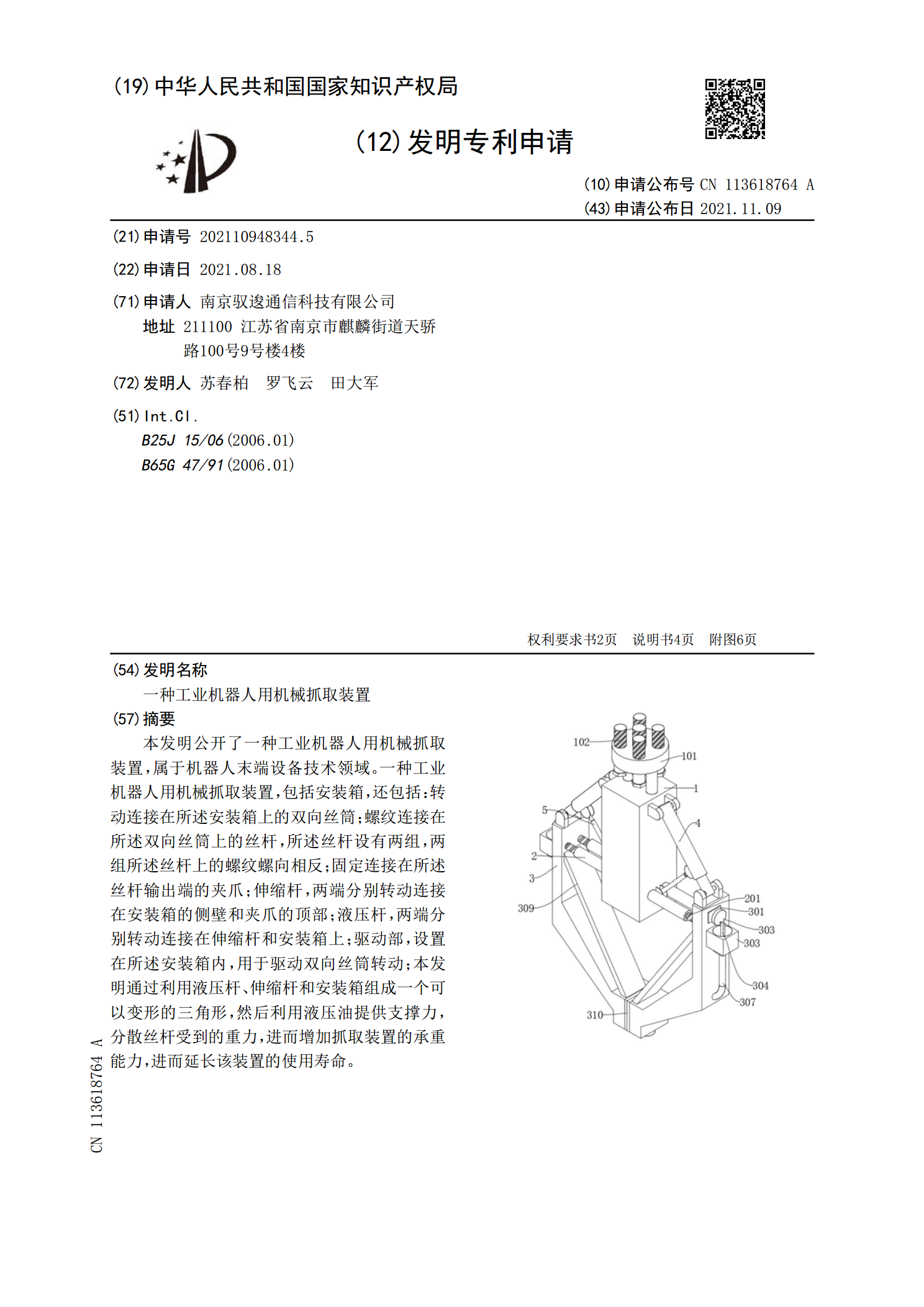
本发明公开了一种工业机器人用机械抓取装置,属于机器人末端设备技术领域。一种工业机器人用机械抓取装置,包括安装箱,还包括:转动连接在所述安装箱上的双向丝筒;螺纹连接在所述双向丝筒上的丝杆,所述丝杆设有两组,两组所述丝杆上的螺纹螺向相反;固定连接在所述丝杆输出端的夹爪;伸缩杆,两端分别转动连接在安装箱的侧壁和夹爪的顶部;液压杆,两端分别转动连接在伸缩杆和安装箱上;驱动部,设置在所述安装箱内,用于驱动双向丝筒转动;本发明通过利用液压杆、伸缩杆和安装箱组成一个可以变形的三角形,然后利用液压油提供支撑力,分散丝杆受
一种工业机器人用机械抓取装置.pdf
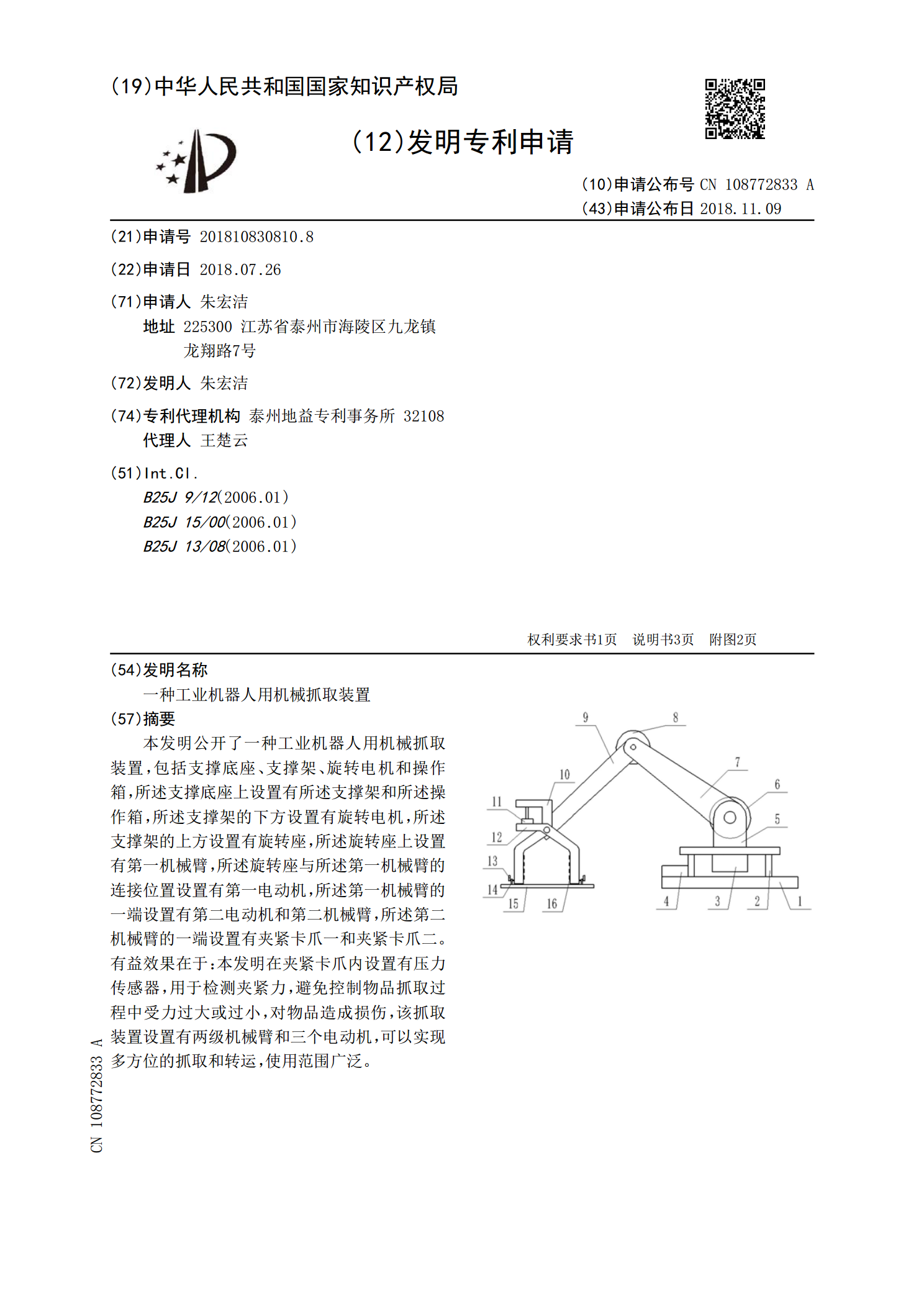
本发明公开了一种工业机器人用机械抓取装置,包括支撑底座、支撑架、旋转电机和操作箱,所述支撑底座上设置有所述支撑架和所述操作箱,所述支撑架的下方设置有旋转电机,所述支撑架的上方设置有旋转座,所述旋转座上设置有第一机械臂,所述旋转座与所述第一机械臂的连接位置设置有第一电动机,所述第一机械臂的一端设置有第二电动机和第二机械臂,所述第二机械臂的一端设置有夹紧卡爪一和夹紧卡爪二。有益效果在于:本发明在夹紧卡爪内设置有压力传感器,用于检测夹紧力,避免控制物品抓取过程中受力过大或过小,对物品造成损伤,该抓取装置设置有两