
一种双行程伸缩机械手臂装置及其操作方法.pdf

含秀****66

1/7
2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双行程伸缩机械手臂装置及其操作方法.pdf
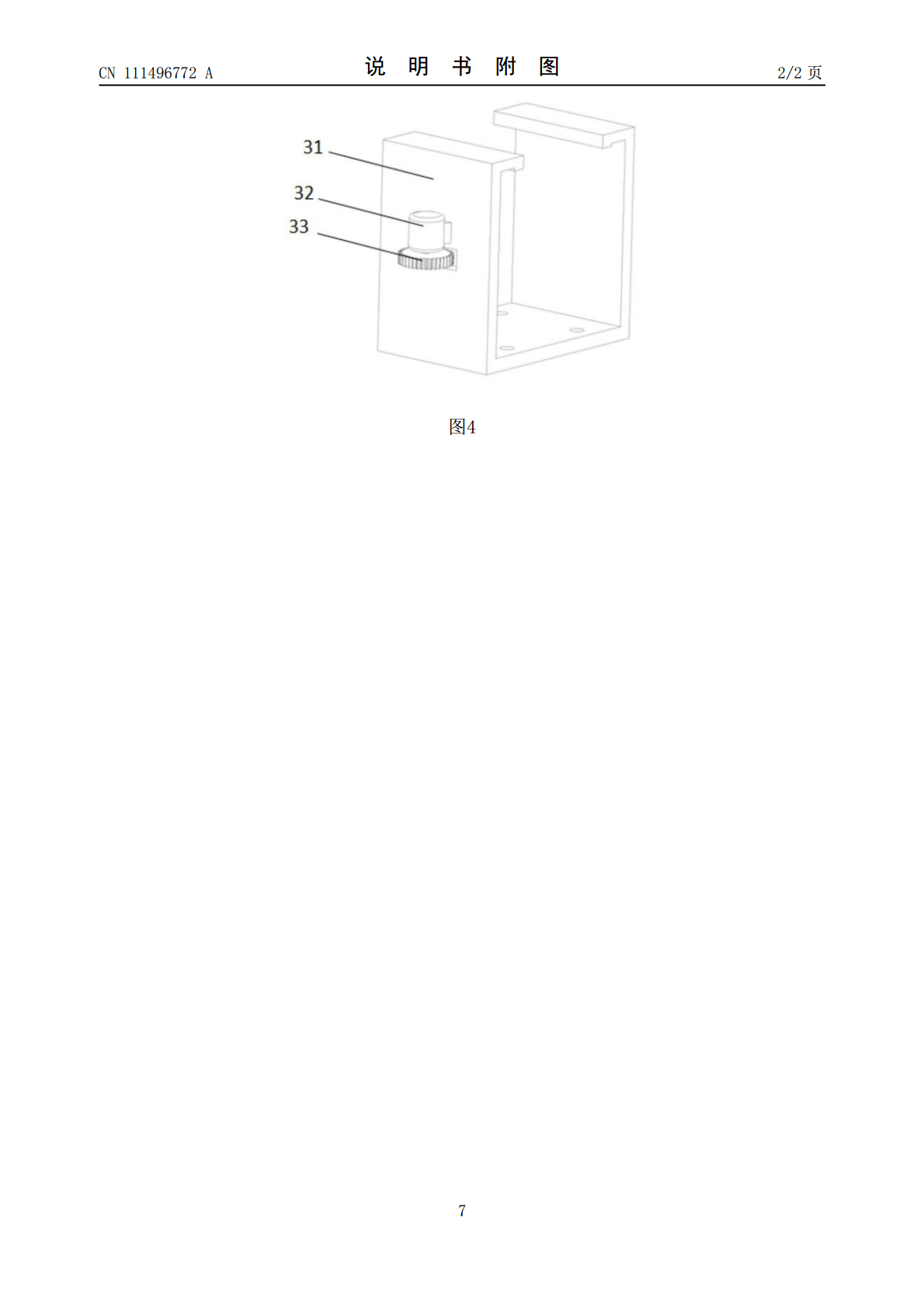
本发明公开了一种双行程伸缩机械手臂装置及其操作方法,所述装置包括:固定臂,包括:油缸;油缸的筒体外壁设置有加强肋和第一运动导槽;伸缩筒臂,包括:筒臂本体;筒臂本体的内壁设置有导轨,外壁设置有驱动齿条和第二运动导槽;其中,筒臂本体固连于油缸的活塞杆;筒臂本体通过导轨可移动的安装于第一运动导槽;手爪安装座,包括:安装座本体和驱动齿轮;安装座本体可移动的安装于第二运动导槽;驱动齿轮与驱动齿条相啮合,形成齿轮齿条传动结构,用于实现手爪安装座在筒臂本体上,沿第二运动导槽移动。本发明的装置位移较大,结构紧凑且具有较好

一种用于辅助机械手臂伸缩旋转的装置.pdf
本发明专利公开了一种机械手辅助伸缩装置,包括有底座、旋转底座、伸缩箱体、齿条、齿轮、旋转杆、散热孔、电控箱、控制板、电动推杆、散热器、温度传感器、PLC控制器、蓄电池、联轴器、电机。本发明专利结构科学合理,使用安全方便,设置了伸缩箱体,能够有效的辅助机械手臂进行升高或者降低,设置了齿轮齿条,能够有效实现机械手臂的自如旋转,设置了温度传感器和散热器,能够有效的对底座内部的机械元件进行散热处理,能够有效的保证底座内部的机械元件时刻处于正常的工作温度下,保证了机械手臂的正常工作,具有很好的实用价值。

一种双抓手搬运机械手臂装置.pdf
本发明公开了一种双抓手搬运机械手臂装置,包括支撑架、竖向杆控制装置和驱动装置,所述支撑架上端固定有固定底座,所述固定底座上设置有机座转动盘,所述机座转动盘侧面连接有多齿轮箱,所述驱动装置下方安装有多齿轮箱,所述辅助臂连接斗杆,且力臂通过第一转动轴连接斗杆,所述斗杆前端设置有前端固定块,所述前端固定块下方设置有抓手转动盘,且抓手转动盘连接抓手控制装置,所述抓手控制装置上安装有抓手。该双抓手搬运机械手臂装置,结构设计合理,采用机座转动盘使设备可全方位进行工作,使物品搬运更加方便灵活,采用双抓手设计,加强抓握的
一种多级旋转伸缩型机械手臂.pdf
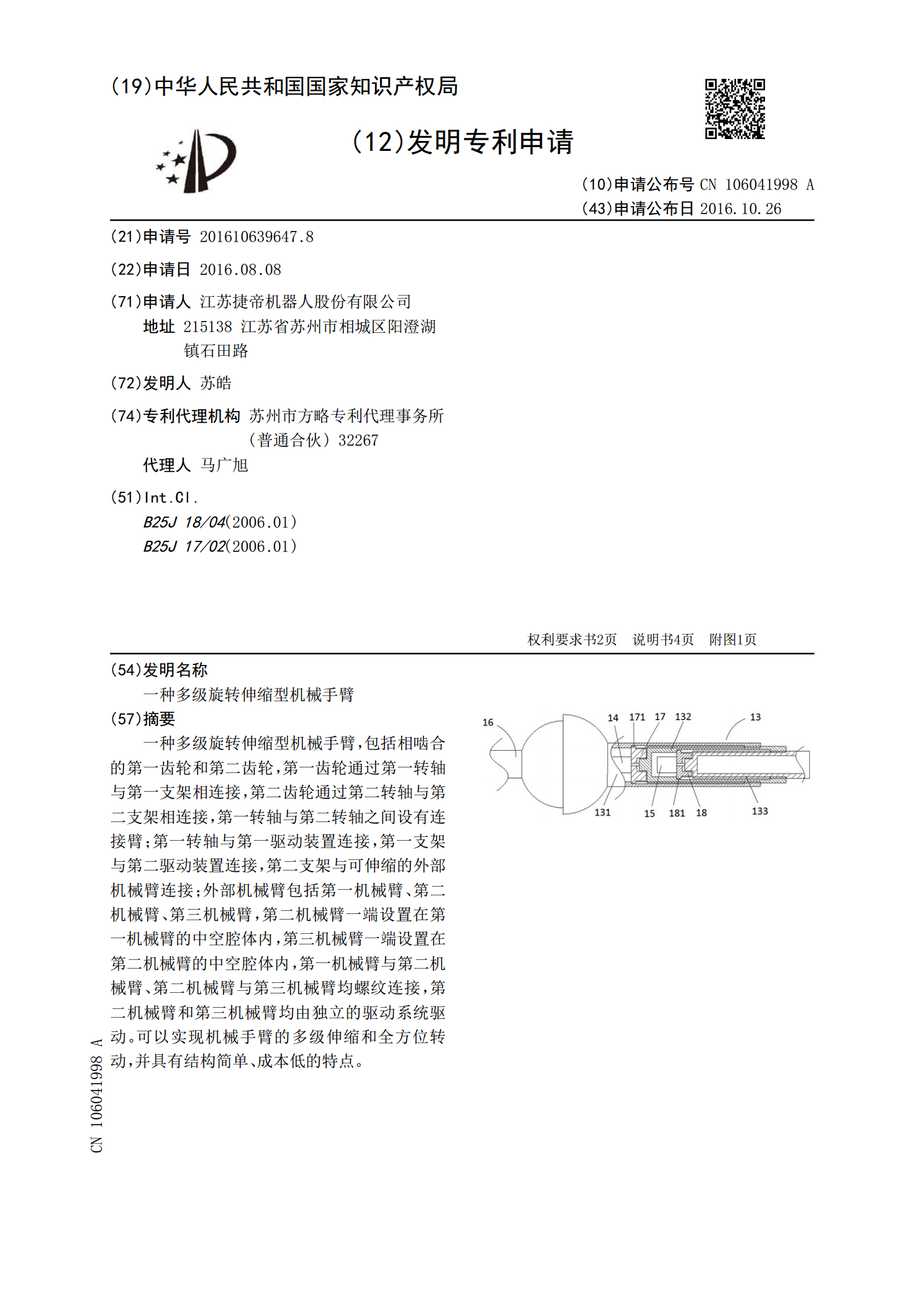
一种多级旋转伸缩型机械手臂,包括相啮合的第一齿轮和第二齿轮,第一齿轮通过第一转轴与第一支架相连接,第二齿轮通过第二转轴与第二支架相连接,第一转轴与第二转轴之间设有连接臂;第一转轴与第一驱动装置连接,第一支架与第二驱动装置连接,第二支架与可伸缩的外部机械臂连接;外部机械臂包括第一机械臂、第二机械臂、第三机械臂,第二机械臂一端设置在第一机械臂的中空腔体内,第三机械臂一端设置在第二机械臂的中空腔体内,第一机械臂与第二机械臂、第二机械臂与第三机械臂均螺纹连接,第二机械臂和第三机械臂均由独立的驱动系统驱动。可以实现
一种穿戴式可伸缩采摘机械手臂.pdf
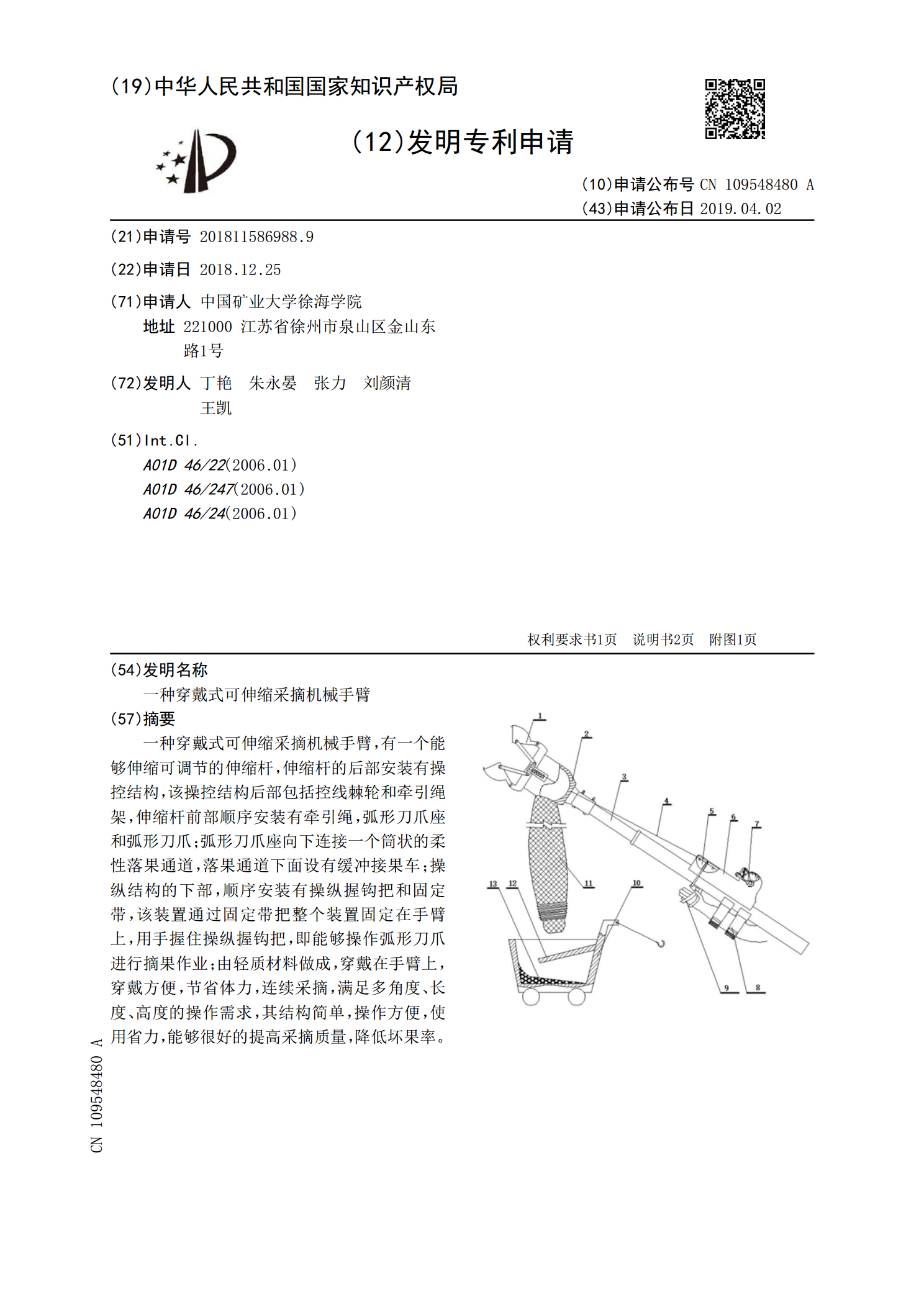
一种穿戴式可伸缩采摘机械手臂,有一个能够伸缩可调节的伸缩杆,伸缩杆的后部安装有操控结构,该操控结构后部包括控线棘轮和牵引绳架,伸缩杆前部顺序安装有牵引绳,弧形刀爪座和弧形刀爪;弧形刀爪座向下连接一个筒状的柔性落果通道,落果通道下面设有缓冲接果车;操纵结构的下部,顺序安装有操纵握钩把和固定带,该装置通过固定带把整个装置固定在手臂上,用手握住操纵握钩把,即能够操作弧形刀爪进行摘果作业;由轻质材料做成,穿戴在手臂上,穿戴方便,节省体力,连续采摘,满足多角度、长度、高度的操作需求,其结构简单,操作方便,使用省力,