
一种双抓手搬运机械手臂装置.pdf

听云****君哇


1/5

2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双抓手搬运机械手臂装置.pdf
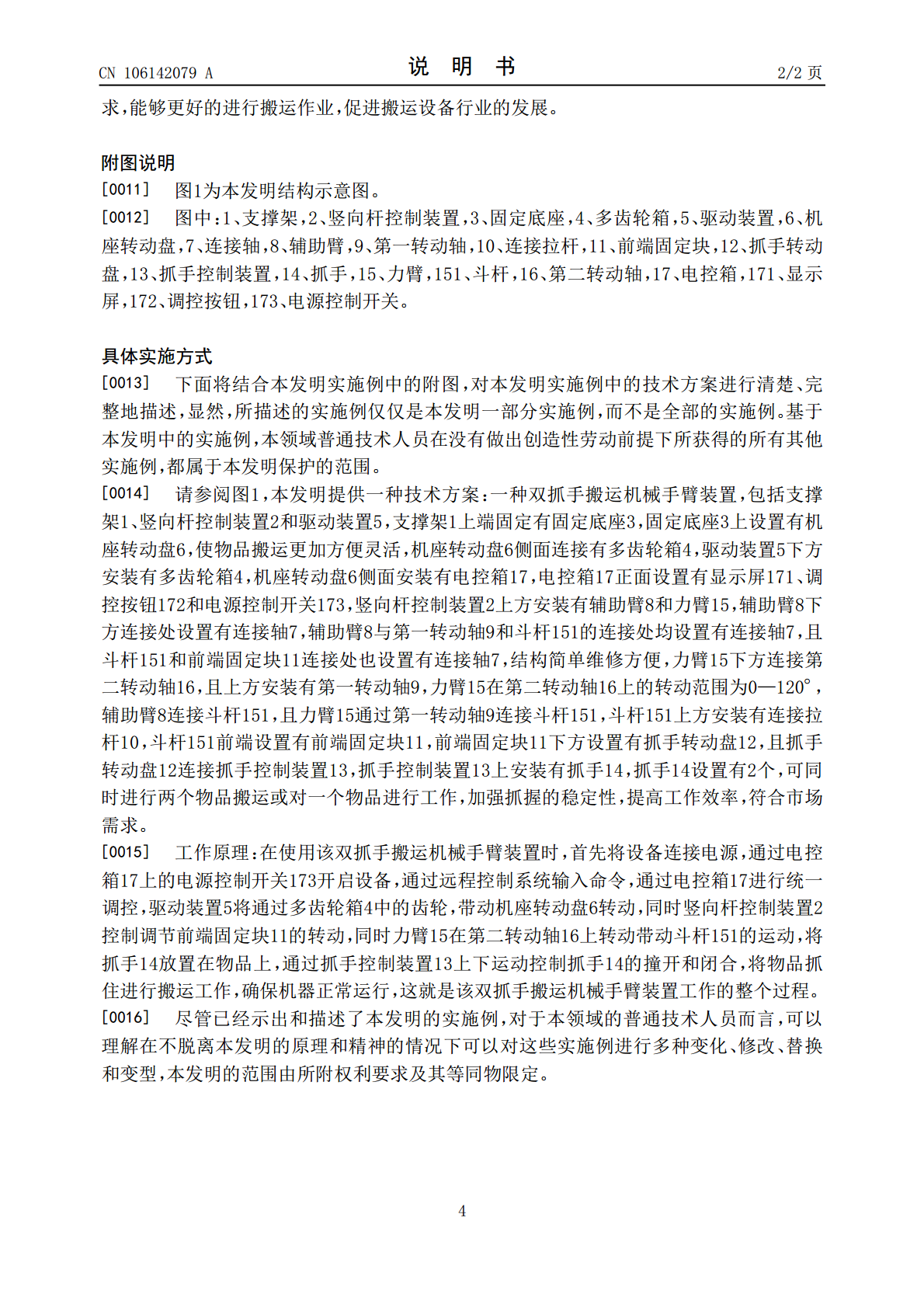
本发明公开了一种双抓手搬运机械手臂装置,包括支撑架、竖向杆控制装置和驱动装置,所述支撑架上端固定有固定底座,所述固定底座上设置有机座转动盘,所述机座转动盘侧面连接有多齿轮箱,所述驱动装置下方安装有多齿轮箱,所述辅助臂连接斗杆,且力臂通过第一转动轴连接斗杆,所述斗杆前端设置有前端固定块,所述前端固定块下方设置有抓手转动盘,且抓手转动盘连接抓手控制装置,所述抓手控制装置上安装有抓手。该双抓手搬运机械手臂装置,结构设计合理,采用机座转动盘使设备可全方位进行工作,使物品搬运更加方便灵活,采用双抓手设计,加强抓握的
一种玻璃基板搬运机械手臂.pdf
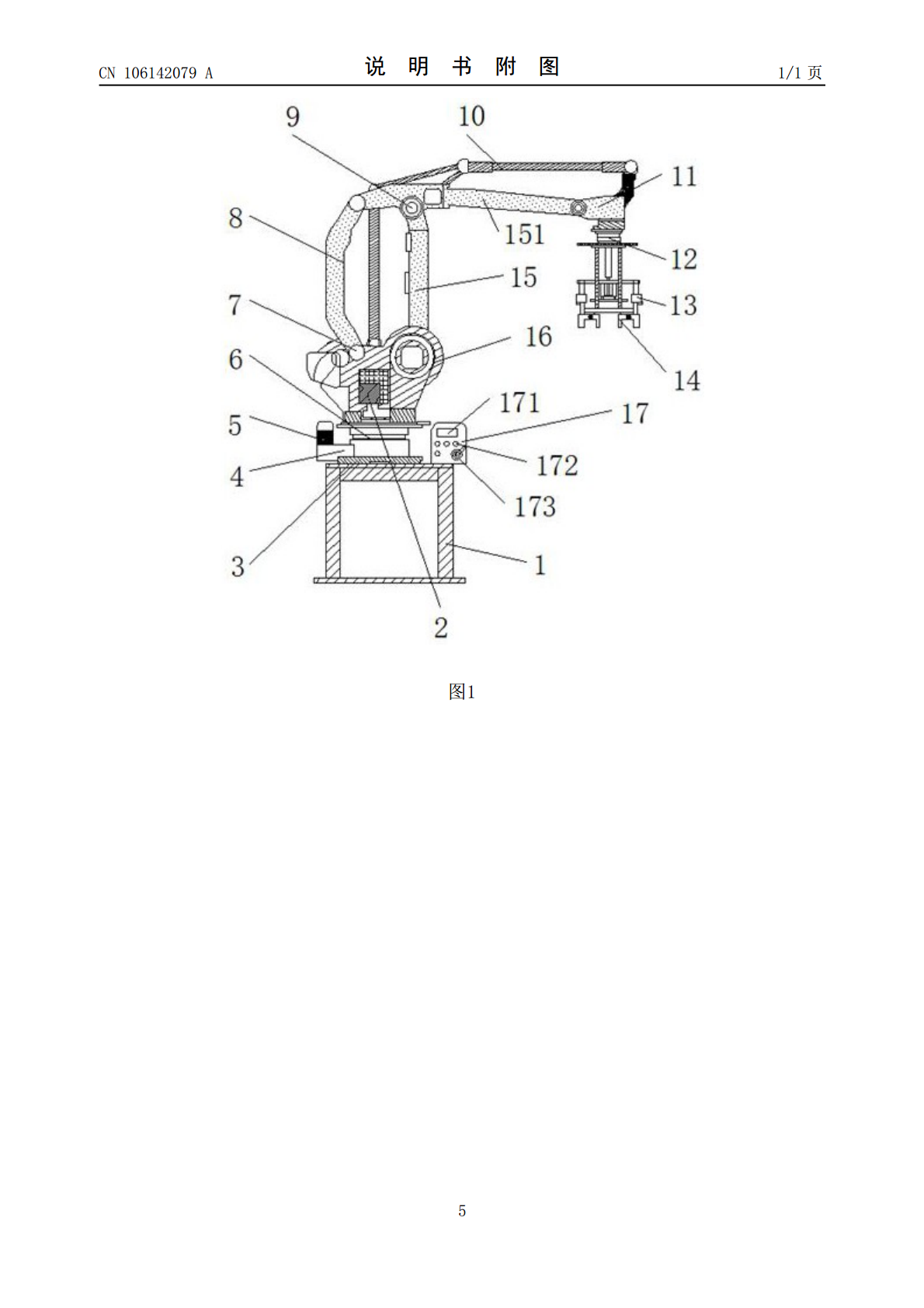
本发明公开一种玻璃基板搬运机械手臂,包括机械手臂本体,机械手臂本体内侧分布有两排牙叉,每个牙叉的支撑端均设有滚轮,滚轮外周设有柔性轮套;机械手臂在搬运玻璃基板时,玻璃基板在两排牙叉之间形成下陷,由于滚轮的作用,使玻璃基板在下陷的过程中为跟随滚轮的滚动状态,从而避免了与牙叉之间滑动摩擦而造成损伤的问题;柔性轮套既能够对玻璃基板实现保护,又能够提供一定的支撑力,保证玻璃基板被可靠地搬运;本发明为后序工艺提供可靠保证,提高了产品的成品率。
一种板材搬运用的机械抓手.pdf
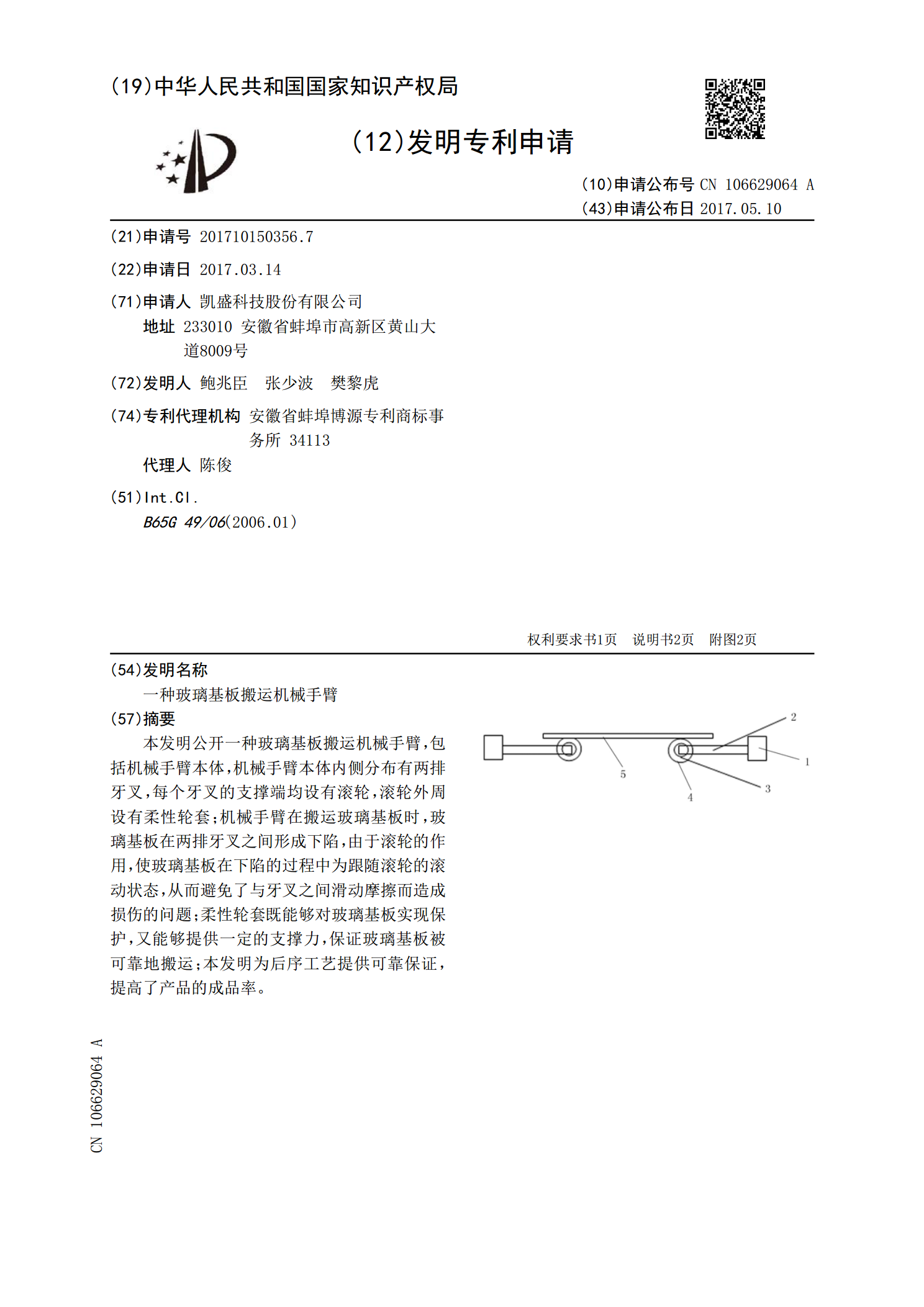
本发明涉及一种板材搬运用的机械抓手,包括电机,电机下方具有将电机固定安装的主架,主架上左部、右部均安装有横向导轨,每个横向导轨上均水平滑动安装有双边齿条,两个双边齿条之间设有与主心轴通过键相连的凸轮,凸轮上开有凸槽,每个双边齿条上靠近凸轮的一端均滑动安装在凸槽内,每个双边齿条的前侧、后侧均啮合有分齿轮。本发明自动化程度高,通过两个双边齿条与凸槽的滑动配合,能够频繁且交替式地控制前侧的夹取块与后侧的夹取块进行合拢或分离,达到多次自动方便抓取或释放板材的效果,且便于机器人对板材的运输。

一种机械抓手装置.pdf
本发明涉及一种机械抓手装置,包括装置固定板,旋转定位组件和抓取组件。所述装置固定板是可将整个机械抓手装置固定安装在机械臂上,机械臂带动装置到相应的实验工位。所述旋转定位组件包括旋转电机,编码器,电机底座,轴承,旋转连接轴等。所述抓取组件包括组件外壳,驱动电机,电机固定板,齿轮,齿条,导轨,滑块,限位传感器,限位挡片,以及曲柄。本发明可以实现抓手的360°旋转,每个方向上的实验板均可以抓取。并且可以适配各种不同类型的实验板,抓取实验板的力度可根据实验板类型可调。本发明能灵活运用在自动化的实验平台上,快速高效
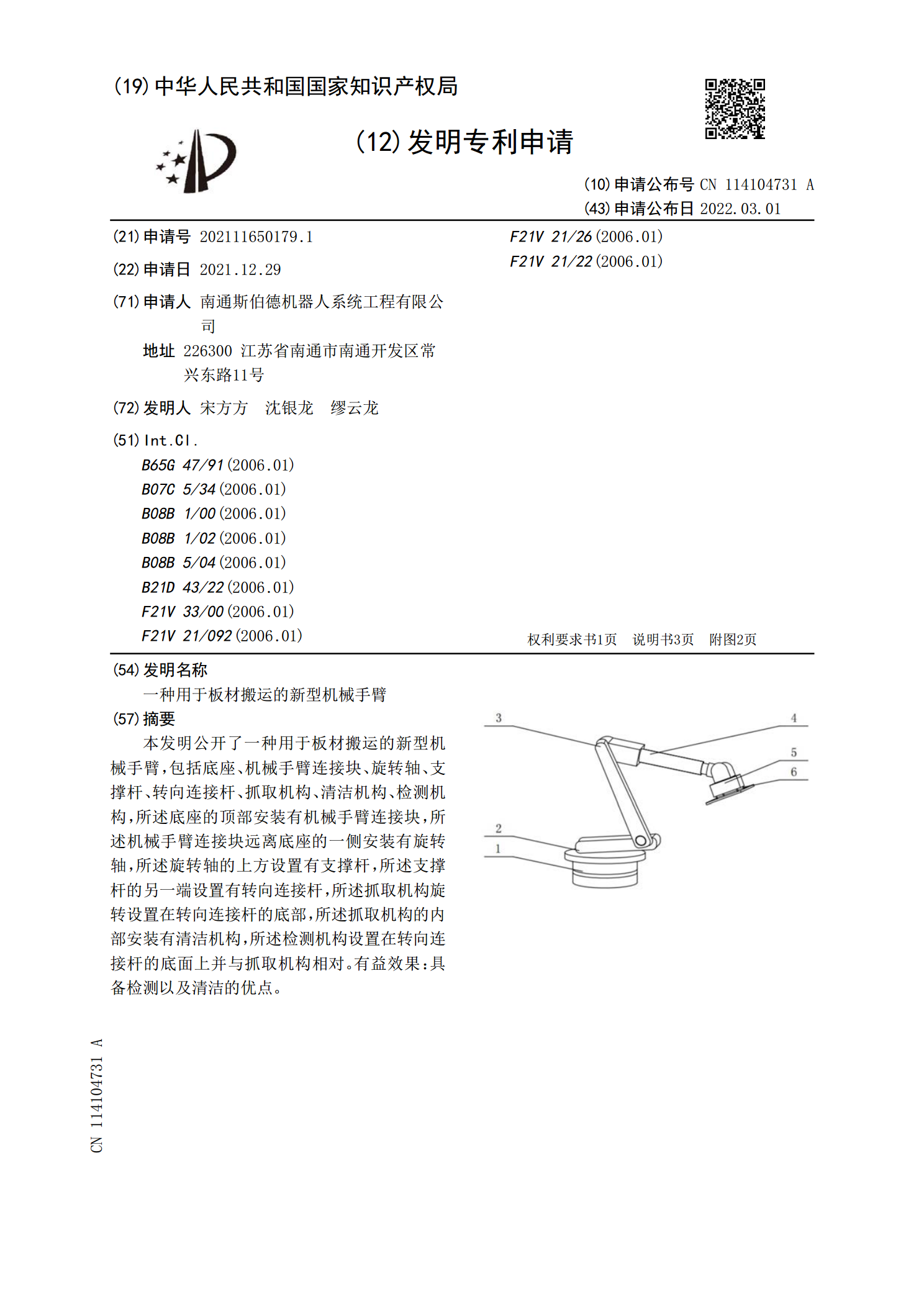
一种用于板材搬运的新型机械手臂.pdf
本发明公开了一种用于板材搬运的新型机械手臂,包括底座、机械手臂连接块、旋转轴、支撑杆、转向连接杆、抓取机构、清洁机构、检测机构,所述底座的顶部安装有机械手臂连接块,所述机械手臂连接块远离底座的一侧安装有旋转轴,所述旋转轴的上方设置有支撑杆,所述支撑杆的另一端设置有转向连接杆,所述抓取机构旋转设置在转向连接杆的底部,所述抓取机构的内部安装有清洁机构,所述检测机构设置在转向连接杆的底面上并与抓取机构相对。有益效果:具备检测以及清洁的优点。