
转向机构、转向系统及车辆.pdf

英瑞****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
转向机构、转向系统及车辆.pdf
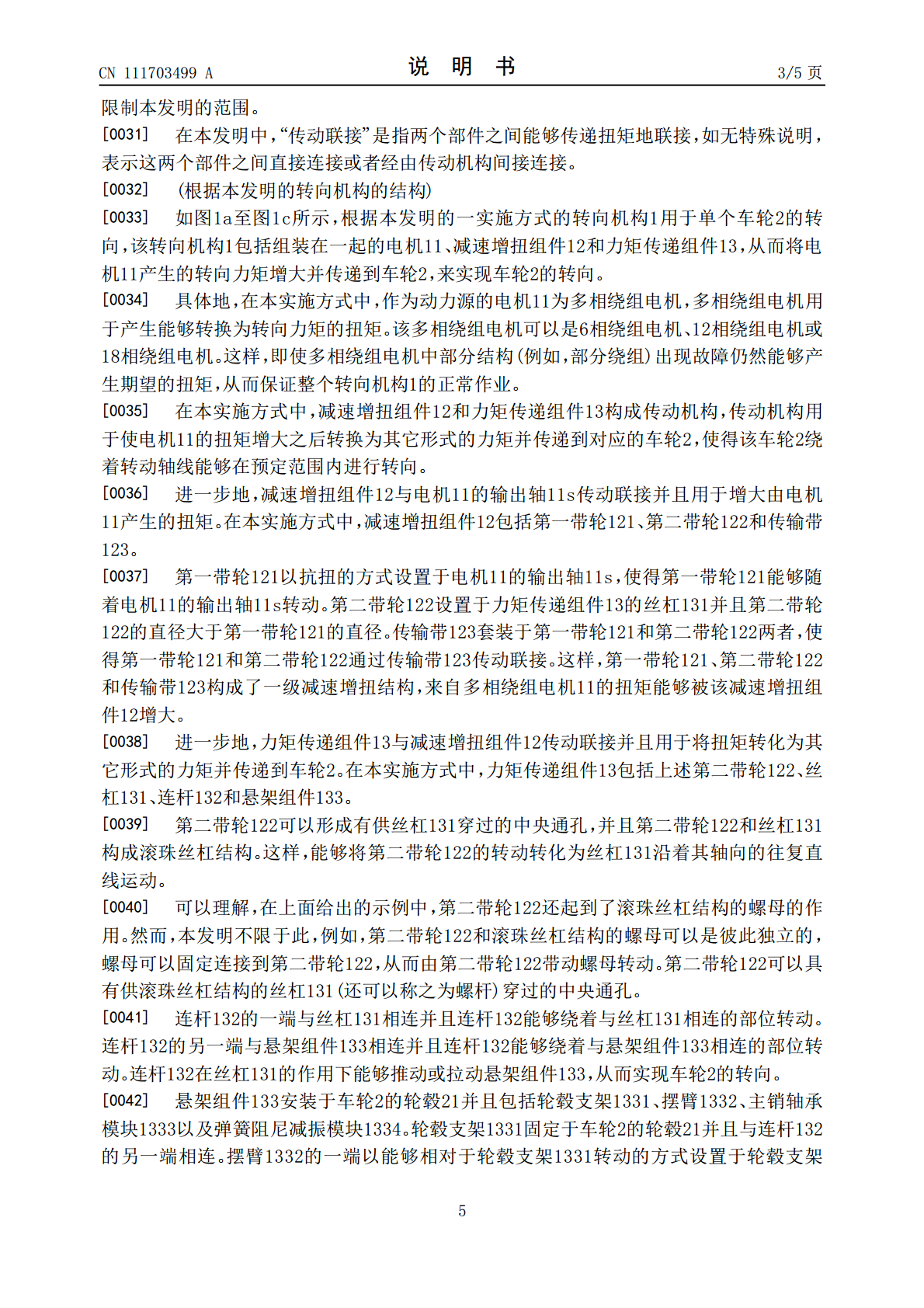
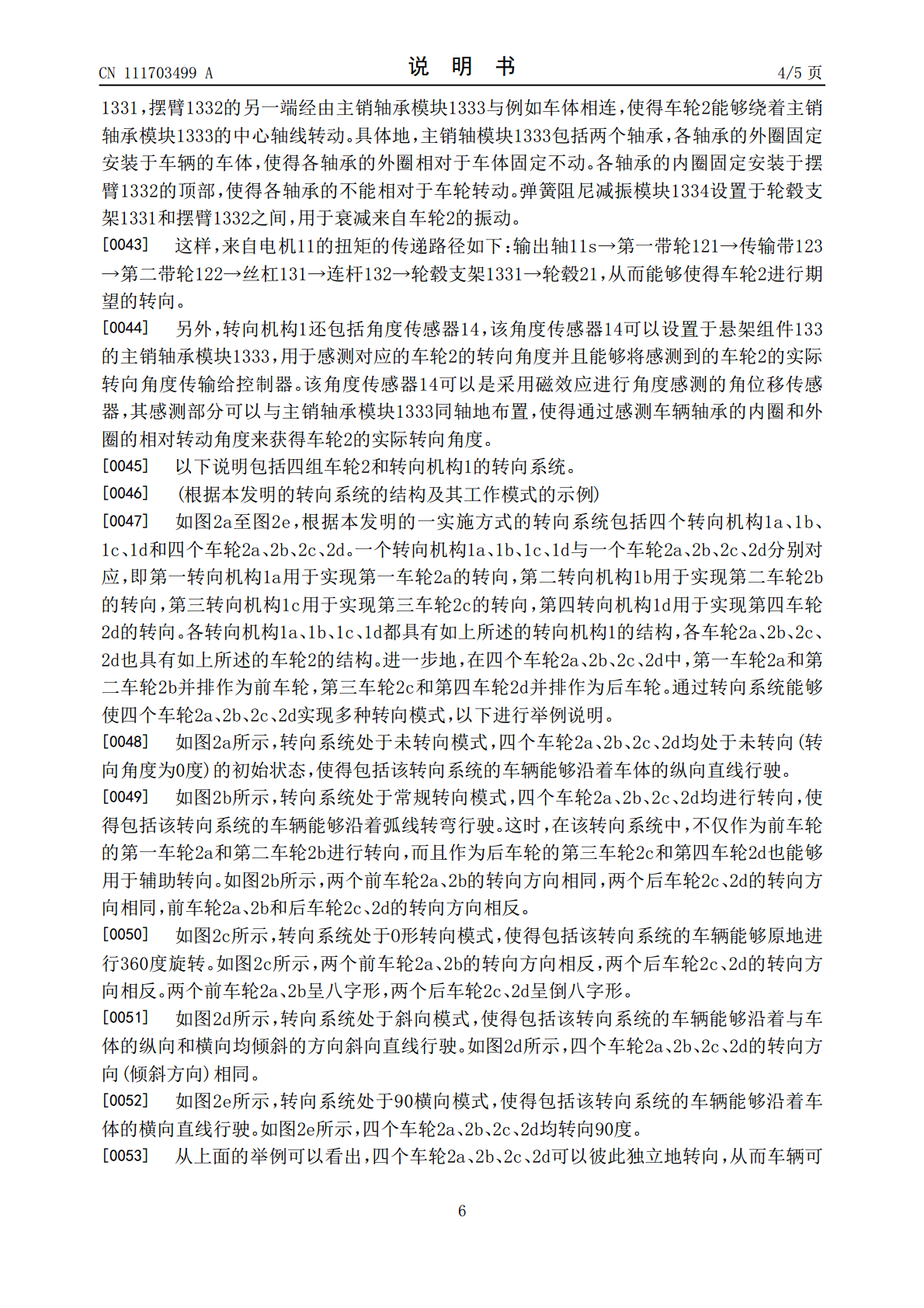
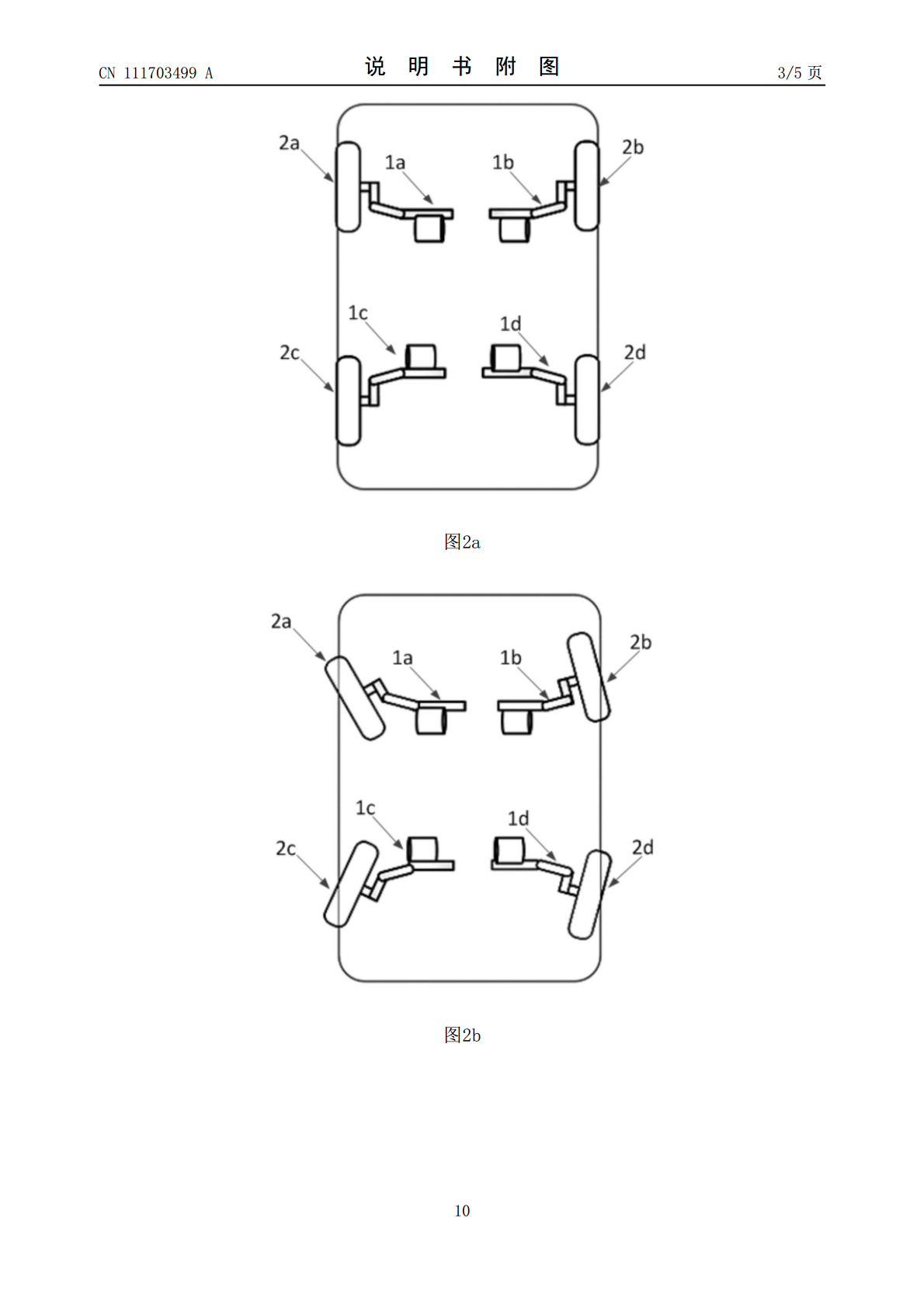
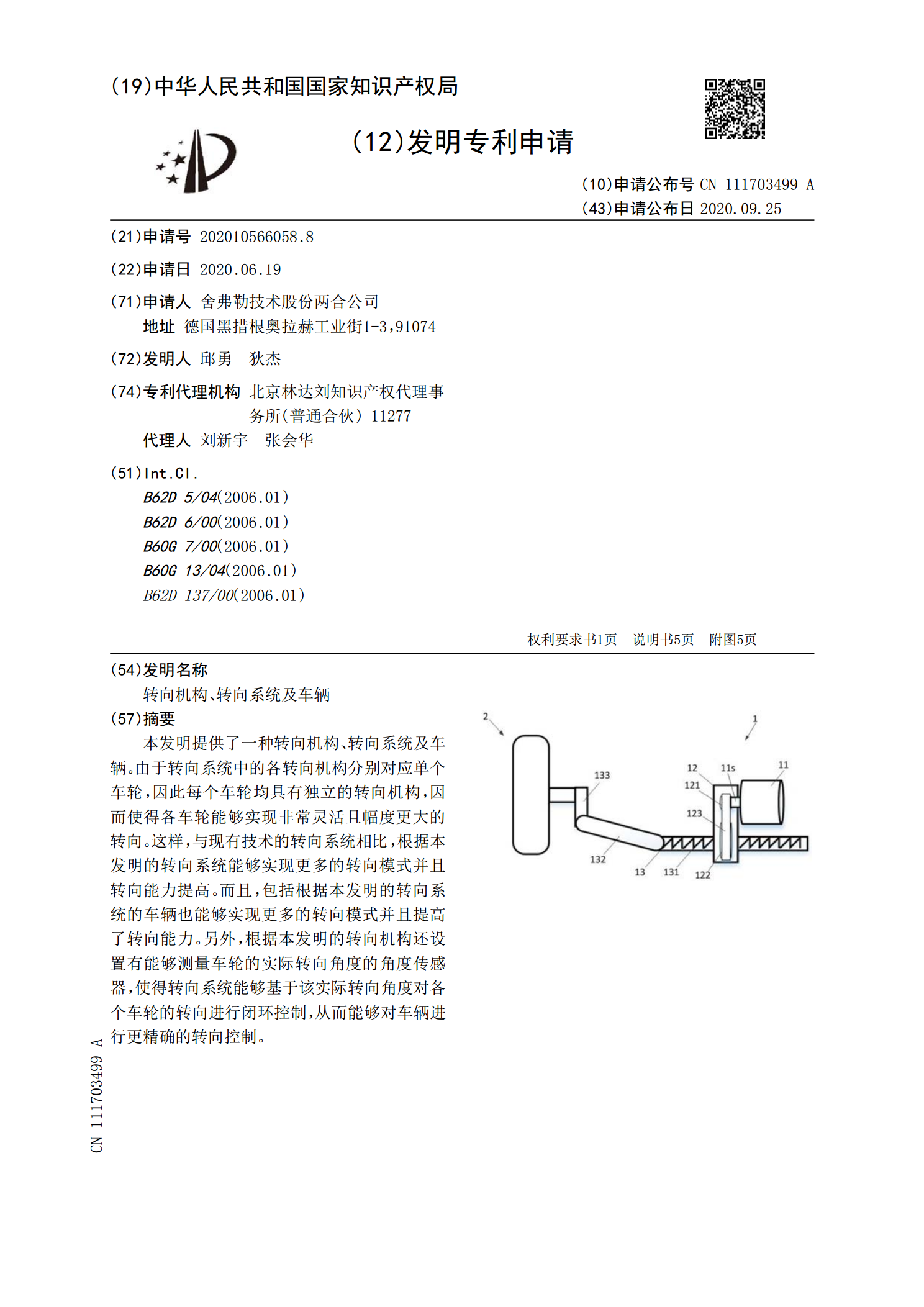
本发明提供了一种转向机构、转向系统及车辆。由于转向系统中的各转向机构分别对应单个车轮,因此每个车轮均具有独立的转向机构,因而使得各车轮能够实现非常灵活且幅度更大的转向。这样,与现有技术的转向系统相比,根据本发明的转向系统能够实现更多的转向模式并且转向能力提高。而且,包括根据本发明的转向系统的车辆也能够实现更多的转向模式并且提高了转向能力。另外,根据本发明的转向机构还设置有能够测量车轮的实际转向角度的角度传感器,使得转向系统能够基于该实际转向角度对各个车轮的转向进行闭环控制,从而能够对车辆进行更精确的转向控
车轮转向机构、车辆转向系统和车辆.pdf
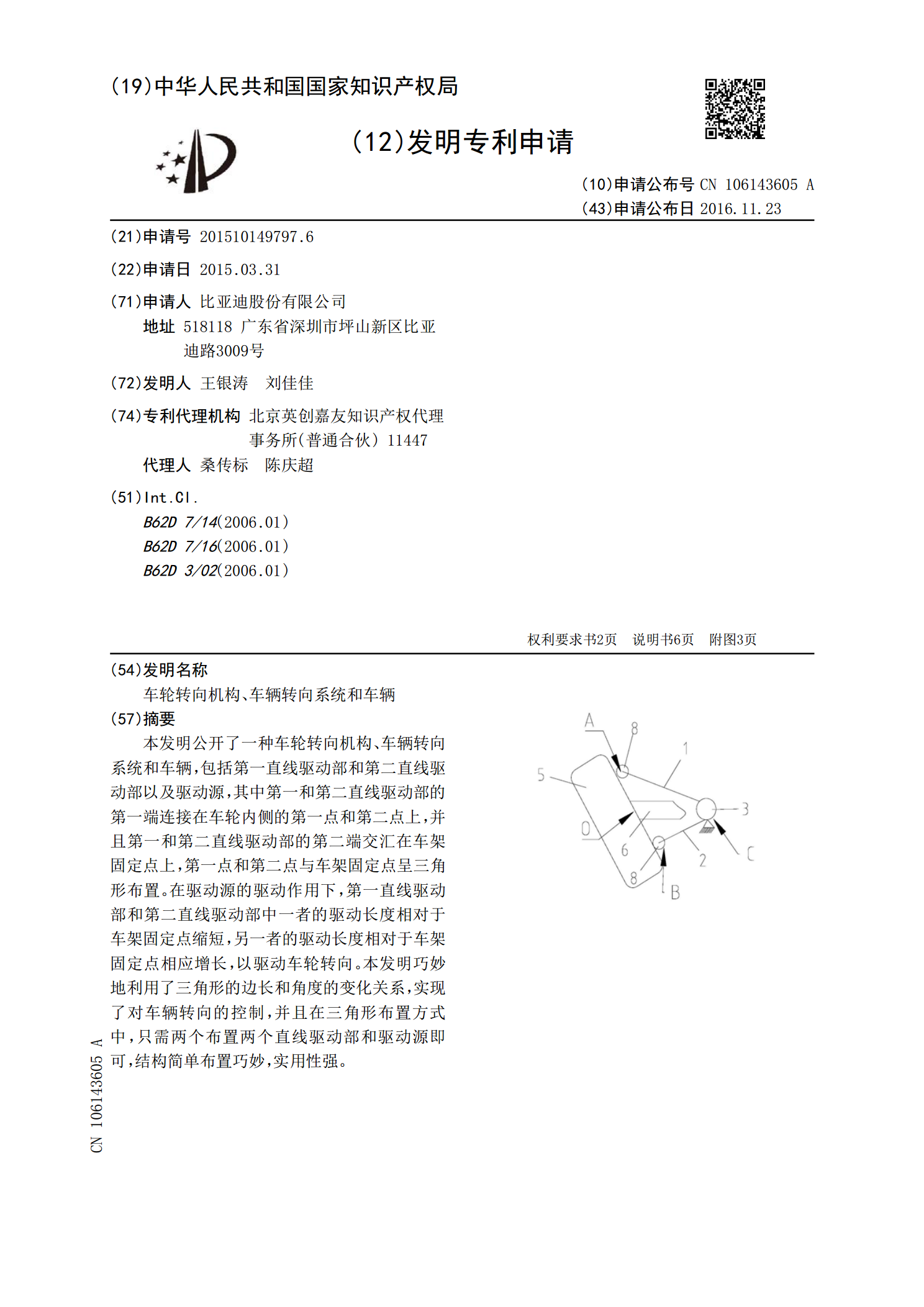
本发明公开了一种车轮转向机构、车辆转向系统和车辆,包括第一直线驱动部和第二直线驱动部以及驱动源,其中第一和第二直线驱动部的第一端连接在车轮内侧的第一点和第二点上,并且第一和第二直线驱动部的第二端交汇在车架固定点上,第一点和第二点与车架固定点呈三角形布置。在驱动源的驱动作用下,第一直线驱动部和第二直线驱动部中一者的驱动长度相对于车架固定点缩短,另一者的驱动长度相对于车架固定点相应增长,以驱动车轮转向。本发明巧妙地利用了三角形的边长和角度的变化关系,实现了对车辆转向的控制,并且在三角形布置方式中,只需两个布置
车辆转向传动机构、车辆转向系统和车辆.pdf
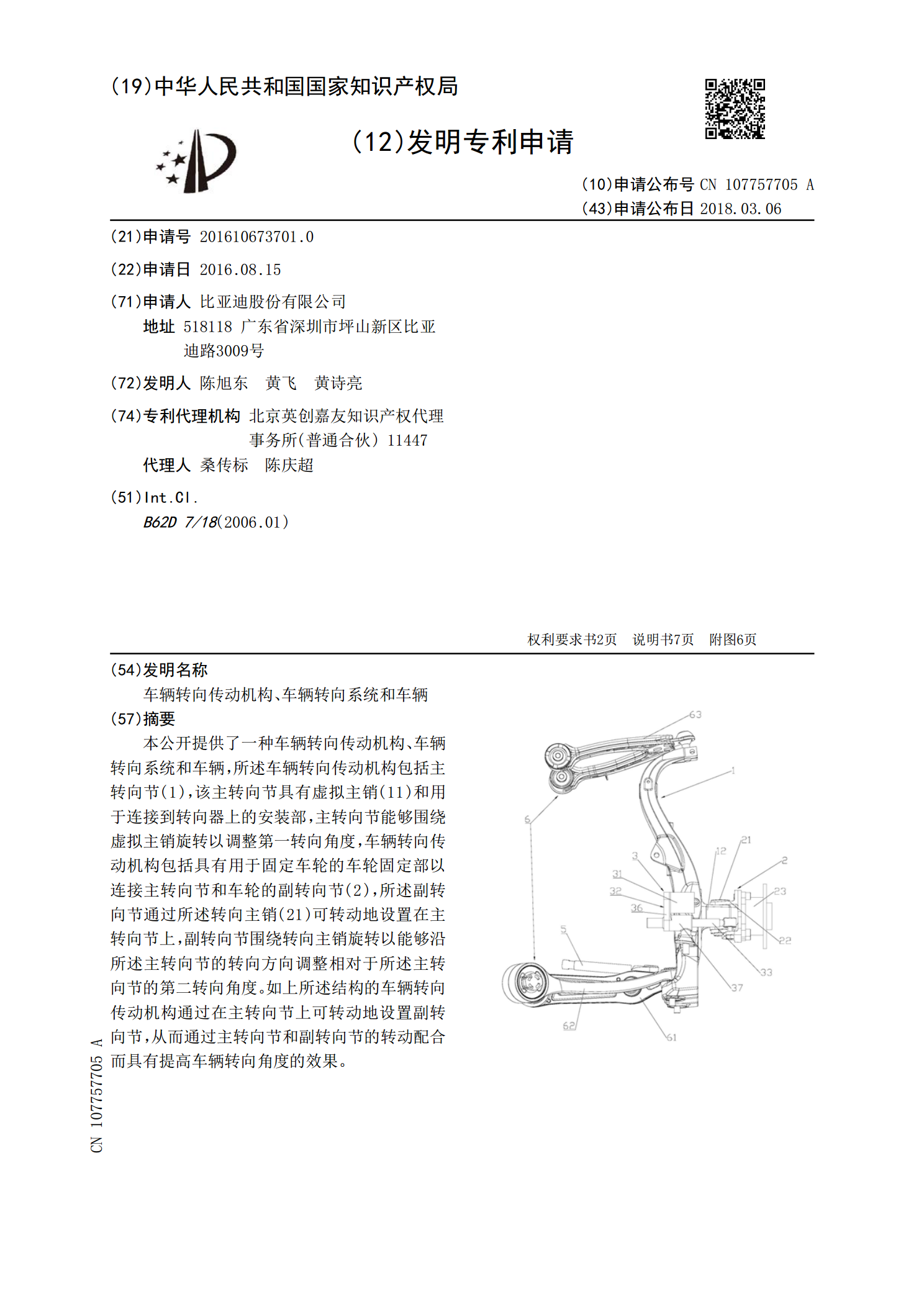
本公开提供了一种车辆转向传动机构、车辆转向系统和车辆,所述车辆转向传动机构包括主转向节(1),该主转向节具有虚拟主销(11)和用于连接到转向器上的安装部,主转向节能够围绕虚拟主销旋转以调整第一转向角度,车辆转向传动机构包括具有用于固定车轮的车轮固定部以连接主转向节和车轮的副转向节(2),所述副转向节通过所述转向主销(21)可转动地设置在主转向节上,副转向节围绕转向主销旋转以能够沿所述主转向节的转向方向调整相对于所述主转向节的第二转向角度。如上所述结构的车辆转向传动机构通过在主转向节上可转动地设置副转向节,

车辆、车辆的转向传动机构和车辆的转向系统.pdf
本发明公开了一种车辆、车辆的转向传动机构和车辆的转向系统,转向传动机构包括第一传动杆,第一传动杆适于连接在车辆的转向器与车辆的右转向轮之间;第二传动杆,第二传动杆适于连接在转向器与车辆的左转向轮之间;第一传动杆和第二传动杆件均设置成沿各自的轴向可伸缩以使转向传动机构在第一状态和第二状态之间切换,转向传动机构位于第一状态时,左转向轮和右转向轮同向偏转,转向传动机构位于第二状态时,左转向轮和右转向轮相对偏转并偏转至对称设置在车辆的左右两侧,且左转向轮与右转向轮之间的距离从前向后或从后向前逐渐增大。根据本发明实

车辆的转向机构及具有该转向机构的车辆.pdf
本发明公开了一种车辆的转向机构及具有该转向机构的车辆,所述车辆的转向机构包括转向器;两个转向横拉杆,转向器连接在两个转向横拉杆之间;两个转向节,两个转向节分别位于转向器的两侧,其中每个转向节的一端均适于与同侧的车辆的转向轮相连,转向节的另一端均与同侧的转向横拉杆相连;安装支架,转向器安装在安装支架上,且安装支架设置成沿车辆的前后方向可移动以使转向机构在第一状态和第二状态之间切换,转向机构位于第一状态时,两侧的转向轮同向偏转,转向机构位于第二状态时,两侧的转向轮相对偏转并偏转至两侧的转向轮之间的距离从前向后