
一种取料作业过程中的防止塌料的方法.pdf

春景****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种取料作业过程中的防止塌料的方法.pdf
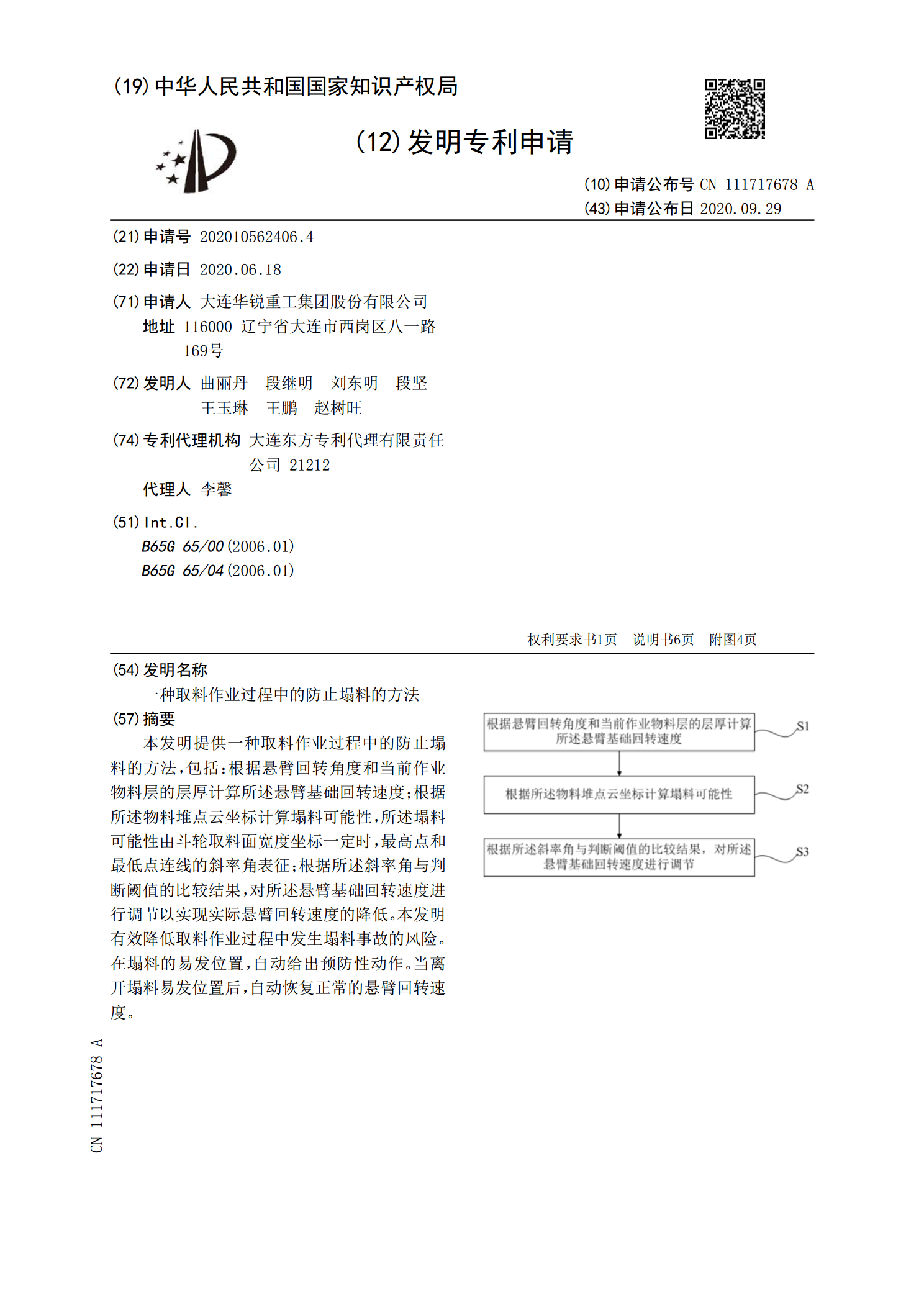
本发明提供一种取料作业过程中的防止塌料的方法,包括:根据悬臂回转角度和当前作业物料层的层厚计算所述悬臂基础回转速度;根据所述物料堆点云坐标计算塌料可能性,所述塌料可能性由斗轮取料面宽度坐标一定时,最高点和最低点连线的斜率角表征;根据所述斜率角与判断阈值的比较结果,对所述悬臂基础回转速度进行调节以实现实际悬臂回转速度的降低。本发明有效降低取料作业过程中发生塌料事故的风险。在塌料的易发位置,自动给出预防性动作。当离开塌料易发位置后,自动恢复正常的悬臂回转速度。

一种斗轮取料机取料混配作业的控制方法.pdf
本发明公开了一种斗轮取料机取料混配作业的控制方法,涉及斗轮取料机取料控制领域,包括按比例取料;斗轮取料机参数设置;进行多模式控制;互通共享多台斗轮取料机的信息;计算物料汇合点距离差和时间差;控制步进精度;获取取料瞬时流量波形图对比数值,并记录混配质量;计算单位时间内混配取料累积量,调整多台所述斗轮取料机各自的参数,本发明从多台斗轮取料机之间数据信息互通共享以及斗轮机回转速度多模式控制,得到单位时间内的累计量趋势图对比、瞬时量波形图对比、行走位置信息界面显示等多方面信息,降低取料司机操作强度、记录取料混配过
一种青贮饲料取料机的取料机构及取料方法.pdf
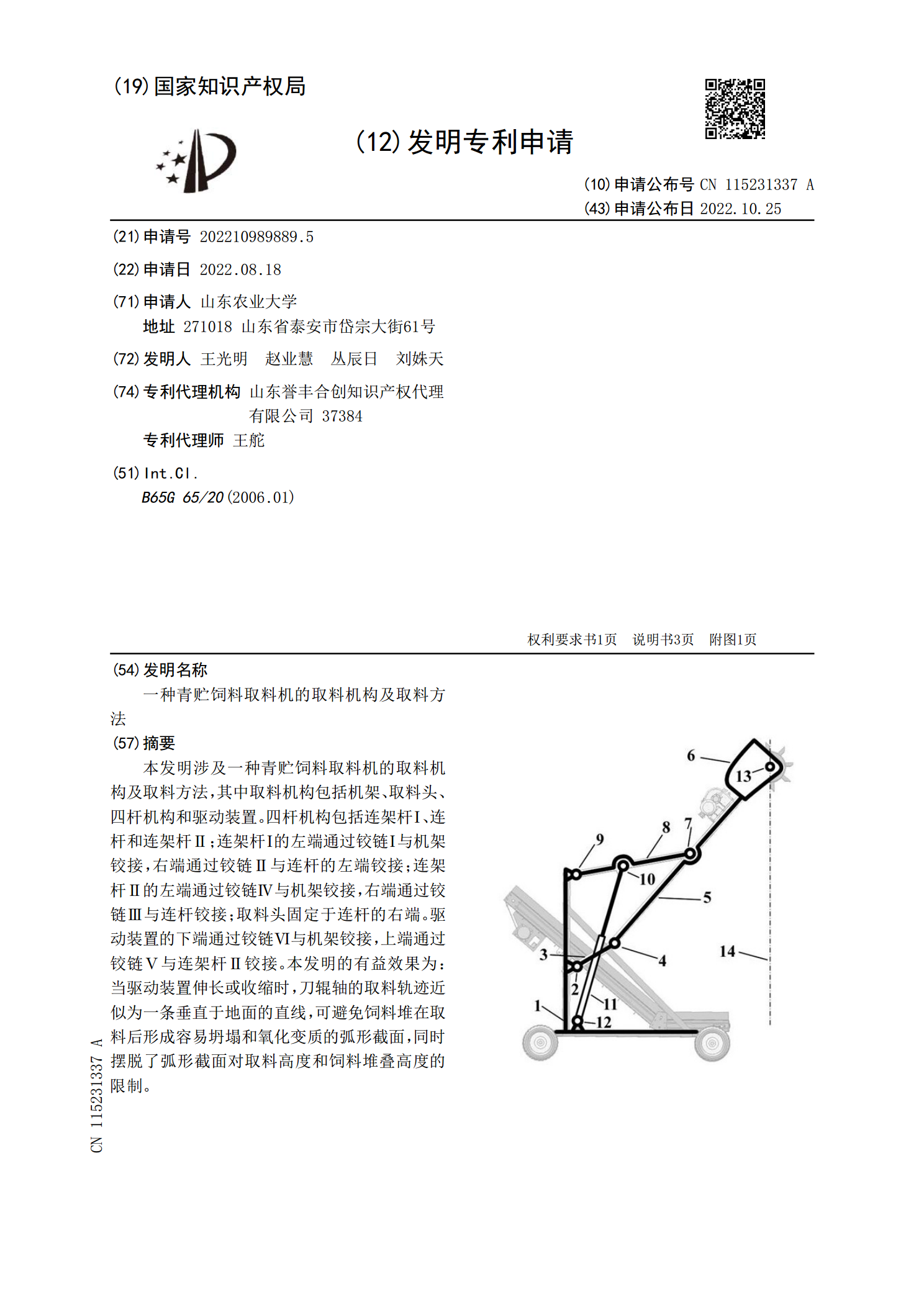
本发明涉及一种青贮饲料取料机的取料机构及取料方法,其中取料机构包括机架、取料头、四杆机构和驱动装置。四杆机构包括连架杆Ⅰ、连杆和连架杆Ⅱ;连架杆Ⅰ的左端通过铰链Ⅰ与机架铰接,右端通过铰链Ⅱ与连杆的左端铰接;连架杆Ⅱ的左端通过铰链Ⅳ与机架铰接,右端通过铰链Ⅲ与连杆铰接;取料头固定于连杆的右端。驱动装置的下端通过铰链Ⅵ与机架铰接,上端通过铰链Ⅴ与连架杆Ⅱ铰接。本发明的有益效果为:当驱动装置伸长或收缩时,刀辊轴的取料轨迹近似为一条垂直于地面的直线,可避免饲料堆在取料后形成容易坍塌和氧化变质的弧形截面,同时摆脱了
一种取料机取料控制方法及装置.pdf
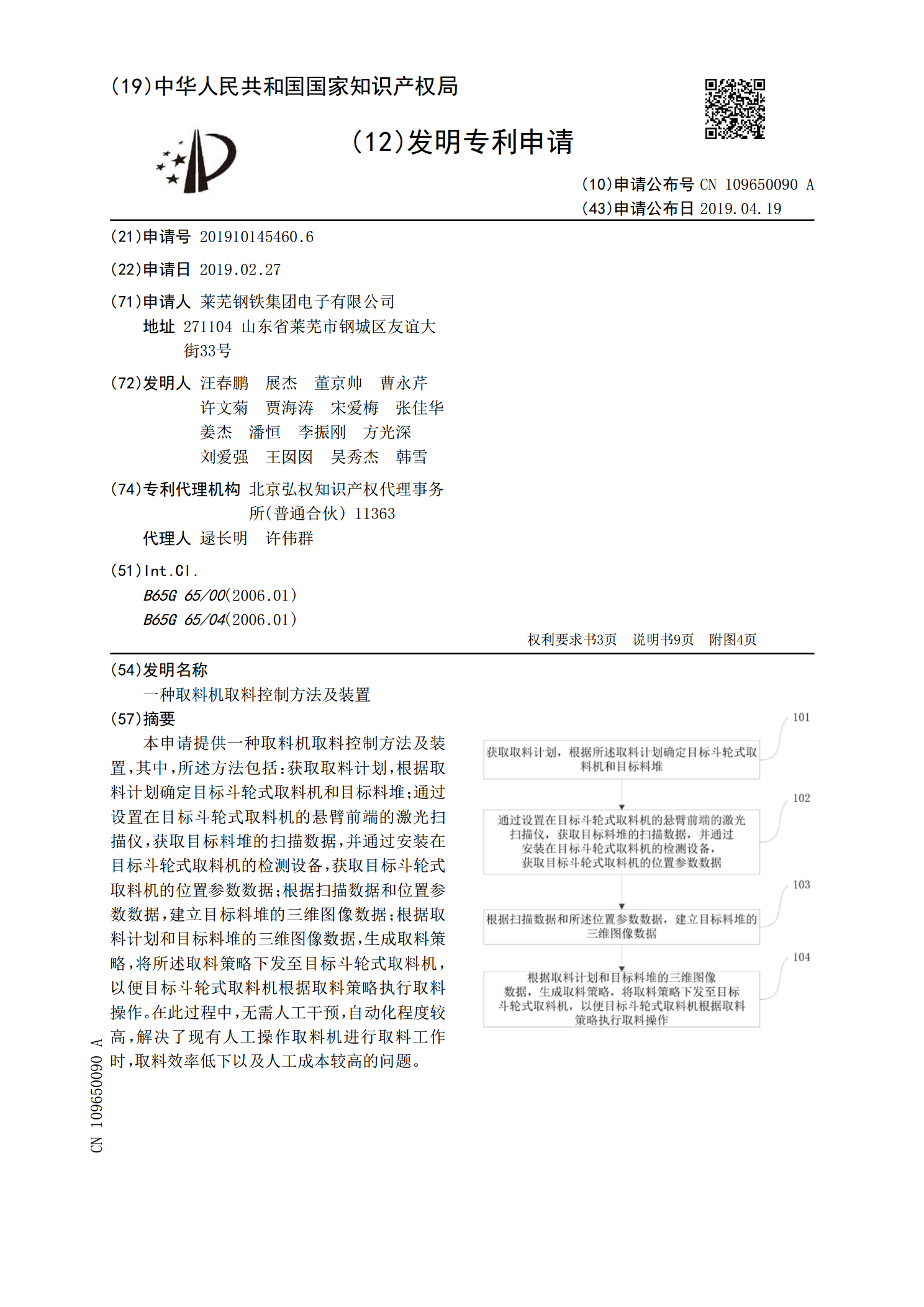
本申请提供一种取料机取料控制方法及装置,其中,所述方法包括:获取取料计划,根据取料计划确定目标斗轮式取料机和目标料堆;通过设置在目标斗轮式取料机的悬臂前端的激光扫描仪,获取目标料堆的扫描数据,并通过安装在目标斗轮式取料机的检测设备,获取目标斗轮式取料机的位置参数数据;根据扫描数据和位置参数数据,建立目标料堆的三维图像数据;根据取料计划和目标料堆的三维图像数据,生成取料策略,将所述取料策略下发至目标斗轮式取料机,以便目标斗轮式取料机根据取料策略执行取料操作。在此过程中,无需人工干预,自动化程度较高,解决了现
一种斗轮取料机取料控制方法及斗轮取料机.pdf
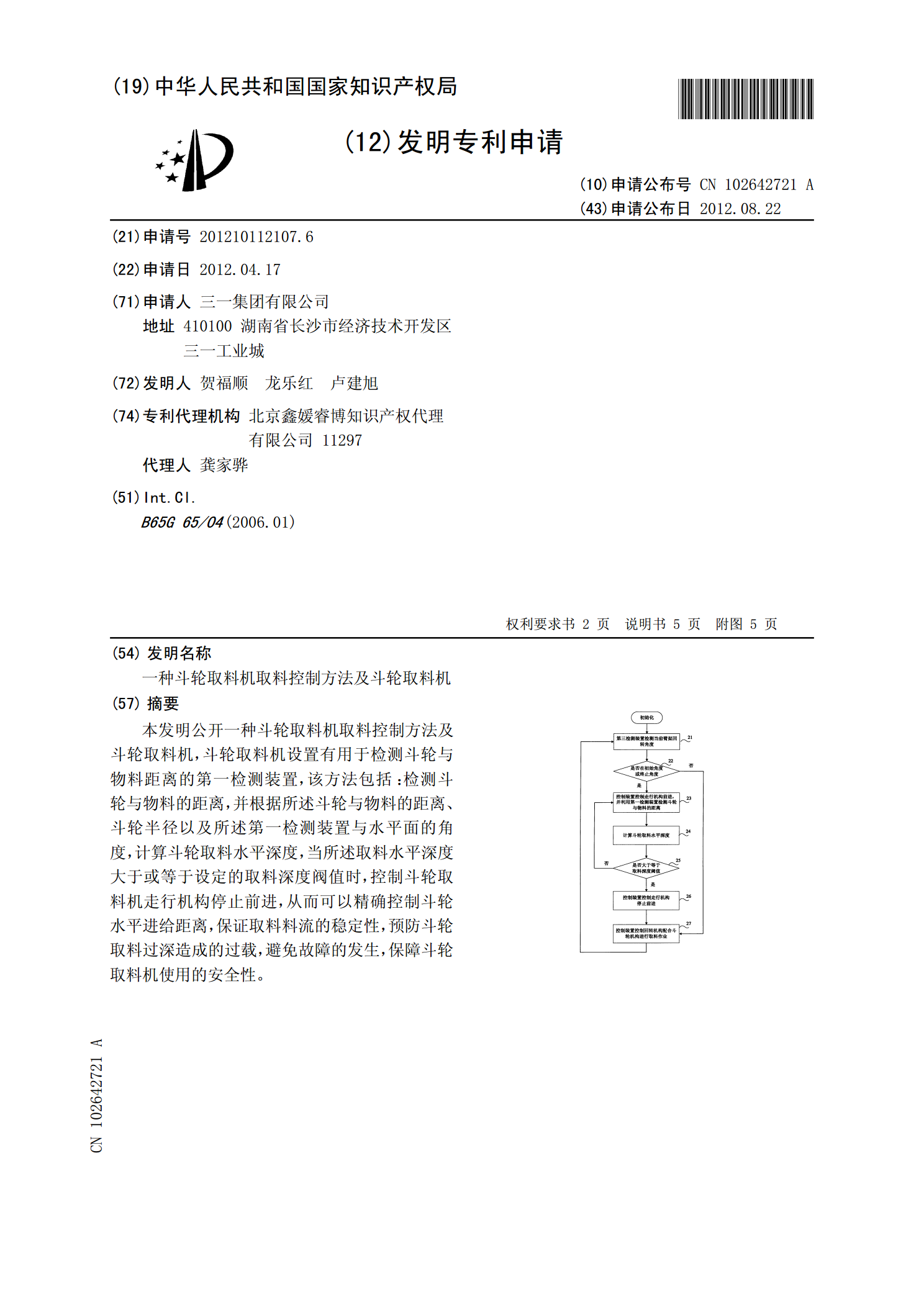
本发明公开一种斗轮取料机取料控制方法及斗轮取料机,斗轮取料机设置有用于检测斗轮与物料距离的第一检测装置,该方法包括:检测斗轮与物料的距离,并根据所述斗轮与物料的距离、斗轮半径以及所述第一检测装置与水平面的角度,计算斗轮取料水平深度,当所述取料水平深度大于或等于设定的取料深度阀值时,控制斗轮取料机走行机构停止前进,从而可以精确控制斗轮水平进给距离,保证取料料流的稳定性,预防斗轮取料过深造成的过载,避免故障的发生,保障斗轮取料机使用的安全性。