
车辆转向控制方法、装置及系统.pdf

是你****嘉嘉

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆转向控制方法与装置、车辆转向系统、车辆.pdf
本公开涉及一种车辆转向控制方法与装置、车辆转向系统、车辆,以及计算机可读存储介质。车辆转向控制方法,包括:获取方向盘转角;根据方向盘转角、转角系数以及当前转向模式下方向盘转角与车辆各轮转角的对应关系,确定车辆各轮的目标转角,其中,转角系数与方向盘最大转角和车轮最大转角的比值正相关;根据车辆各轮的目标转角,控制车辆转向。
车辆转向控制方法、装置及系统.pdf
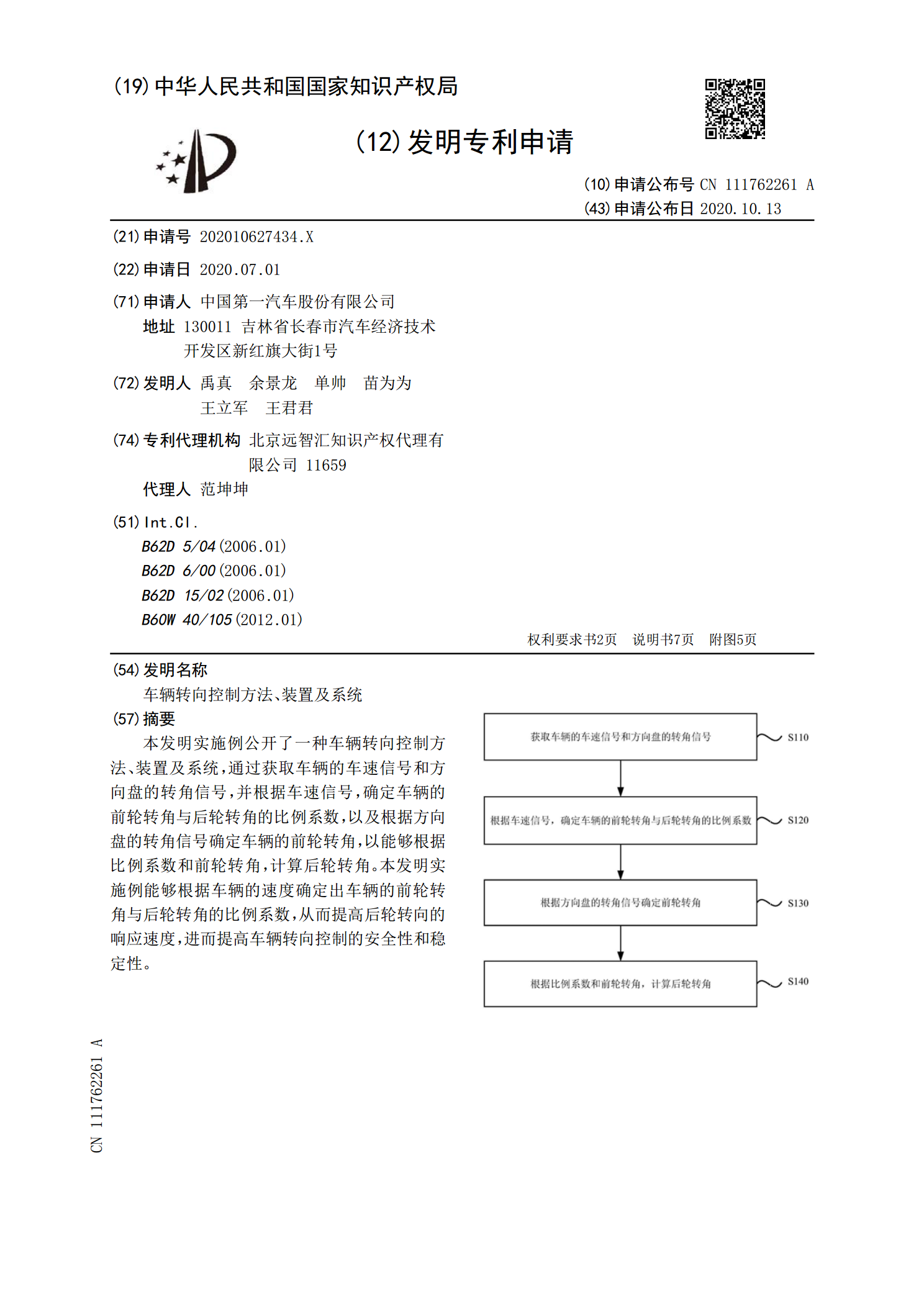
本发明实施例公开了一种车辆转向控制方法、装置及系统,通过获取车辆的车速信号和方向盘的转角信号,并根据车速信号,确定车辆的前轮转角与后轮转角的比例系数,以及根据方向盘的转角信号确定车辆的前轮转角,以能够根据比例系数和前轮转角,计算后轮转角。本发明实施例能够根据车辆的速度确定出车辆的前轮转角与后轮转角的比例系数,从而提高后轮转向的响应速度,进而提高车辆转向控制的安全性和稳定性。
车辆转向控制方法、装置、系统以及车辆.pdf
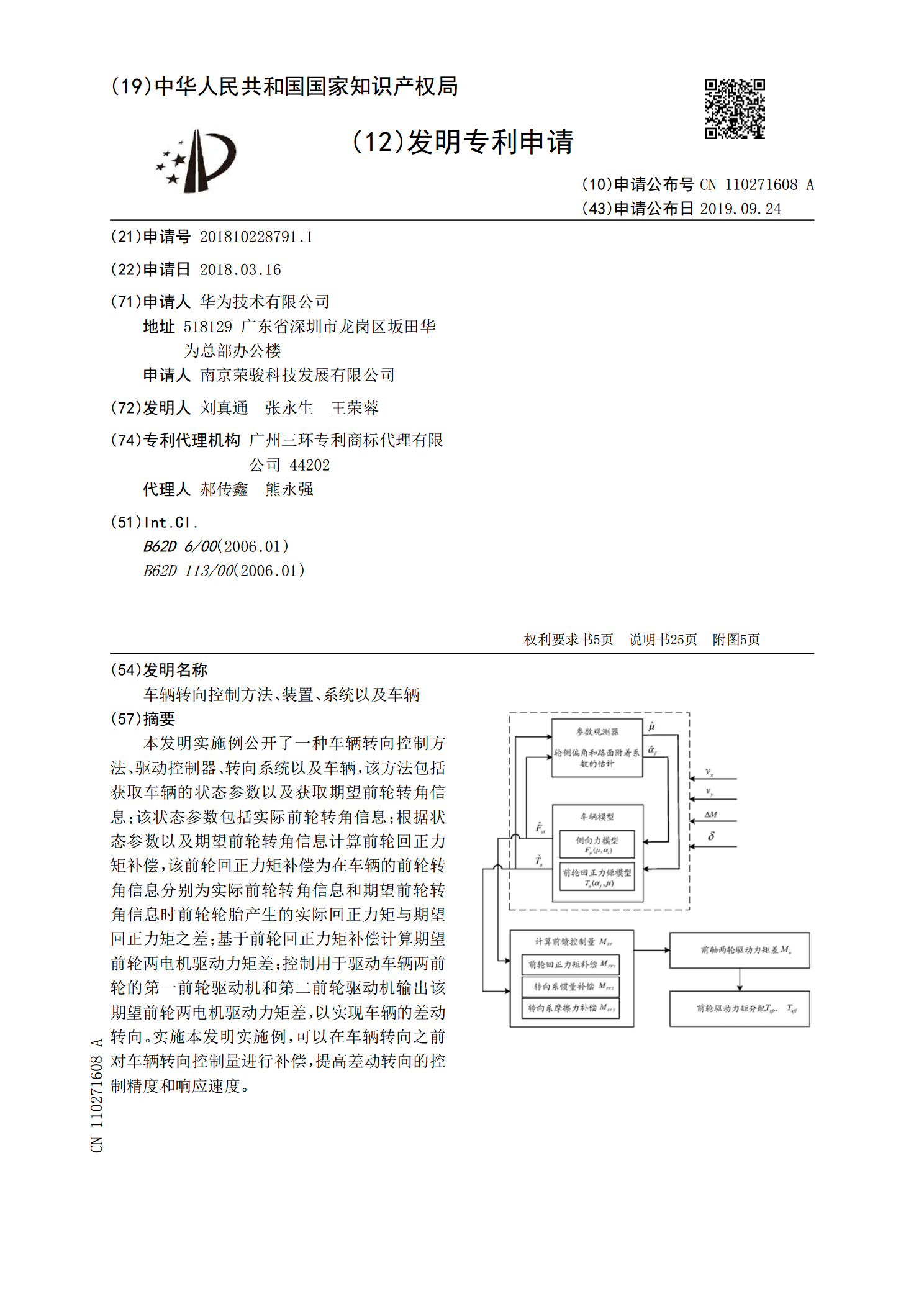
本发明实施例公开了一种车辆转向控制方法、驱动控制器、转向系统以及车辆,该方法包括获取车辆的状态参数以及获取期望前轮转角信息;该状态参数包括实际前轮转角信息;根据状态参数以及期望前轮转角信息计算前轮回正力矩补偿,该前轮回正力矩补偿为在车辆的前轮转角信息分别为实际前轮转角信息和期望前轮转角信息时前轮轮胎产生的实际回正力矩与期望回正力矩之差;基于前轮回正力矩补偿计算期望前轮两电机驱动力矩差;控制用于驱动车辆两前轮的第一前轮驱动机和第二前轮驱动机输出该期望前轮两电机驱动力矩差,以实现车辆的差动转向。实施本发明实施
车辆的转向控制方法及车辆的转向控制装置.pdf
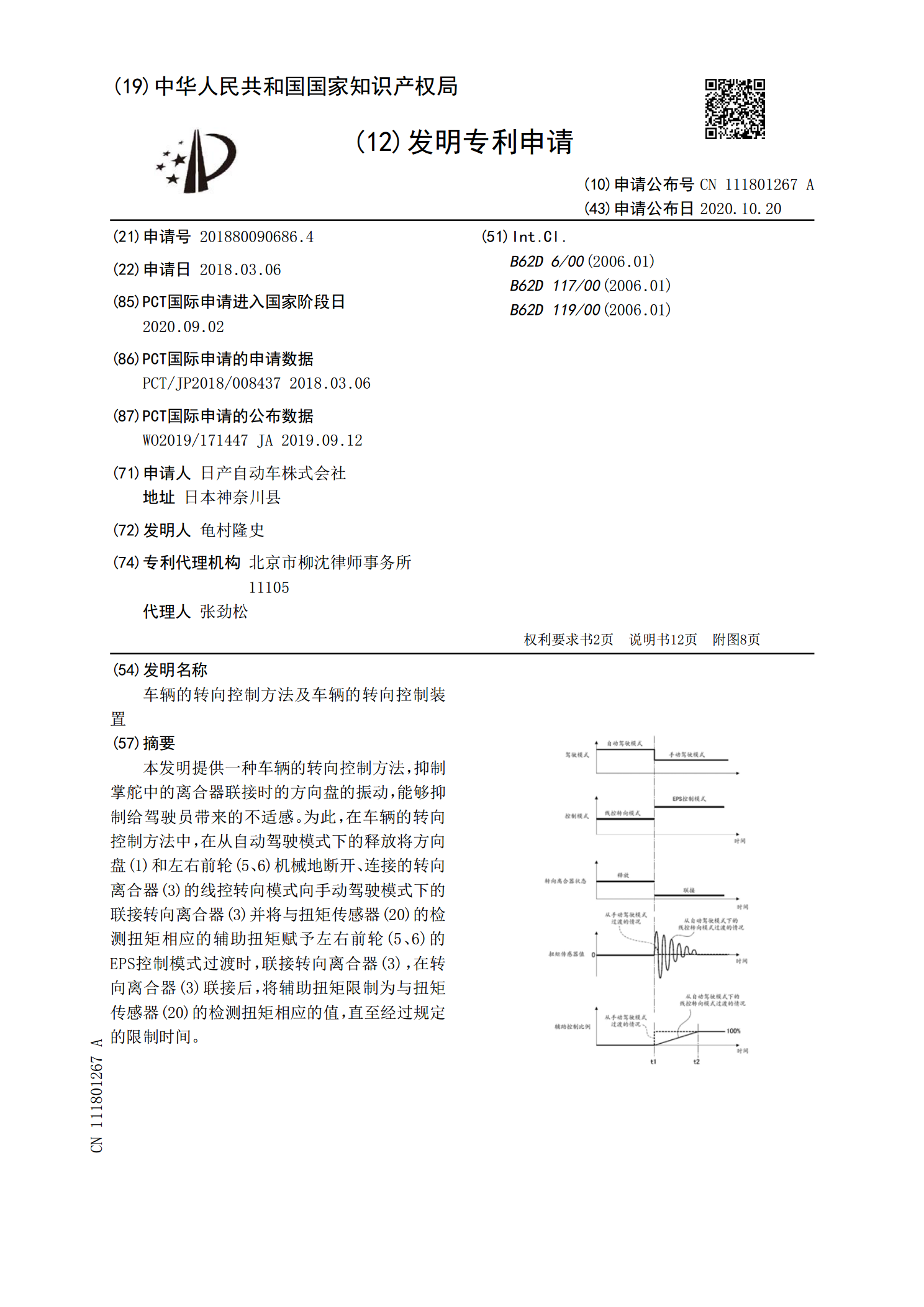
本发明提供一种车辆的转向控制方法,抑制掌舵中的离合器联接时的方向盘的振动,能够抑制给驾驶员带来的不适感。为此,在车辆的转向控制方法中,在从自动驾驶模式下的释放将方向盘(1)和左右前轮(5、6)机械地断开、连接的转向离合器(3)的线控转向模式向手动驾驶模式下的联接转向离合器(3)并将与扭矩传感器(20)的检测扭矩相应的辅助扭矩赋予左右前轮(5、6)的EPS控制模式过渡时,联接转向离合器(3),在转向离合器(3)联接后,将辅助扭矩限制为与扭矩传感器(20)的检测扭矩相应的值,直至经过规定的限制时间。
车辆转向装置及该车辆转向装置的控制方法.pdf
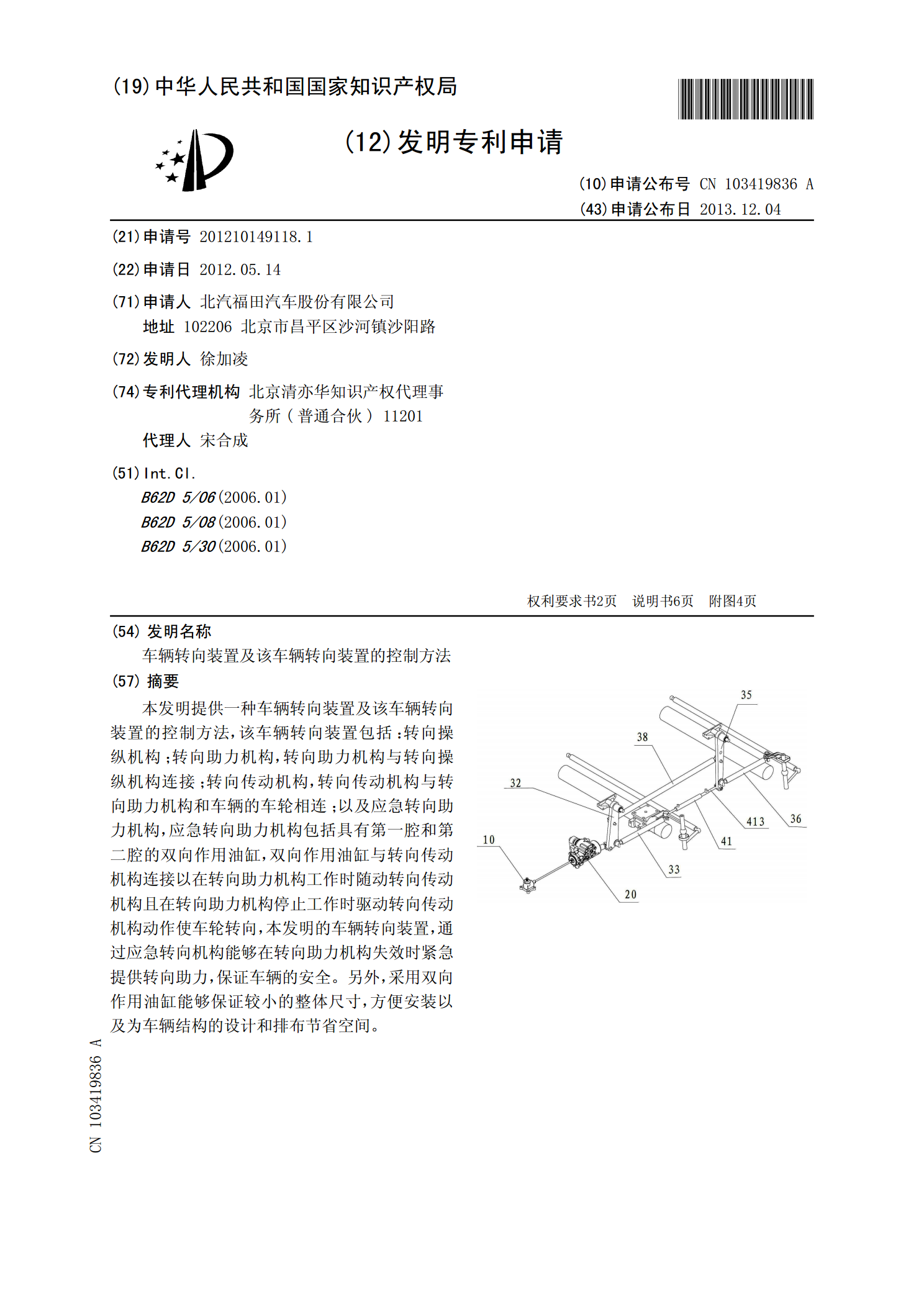
本发明提供一种车辆转向装置及该车辆转向装置的控制方法,该车辆转向装置包括:转向操纵机构;转向助力机构,转向助力机构与转向操纵机构连接;转向传动机构,转向传动机构与转向助力机构和车辆的车轮相连;以及应急转向助力机构,应急转向助力机构包括具有第一腔和第二腔的双向作用油缸,双向作用油缸与转向传动机构连接以在转向助力机构工作时随动转向传动机构且在转向助力机构停止工作时驱动转向传动机构动作使车轮转向,本发明的车辆转向装置,通过应急转向机构能够在转向助力机构失效时紧急提供转向助力,保证车辆的安全。另外,采用双向作用油