
车辆转向控制方法、装置、系统以及车辆.pdf

宏硕****mo

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共36页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆转向控制方法、装置、系统以及车辆.pdf
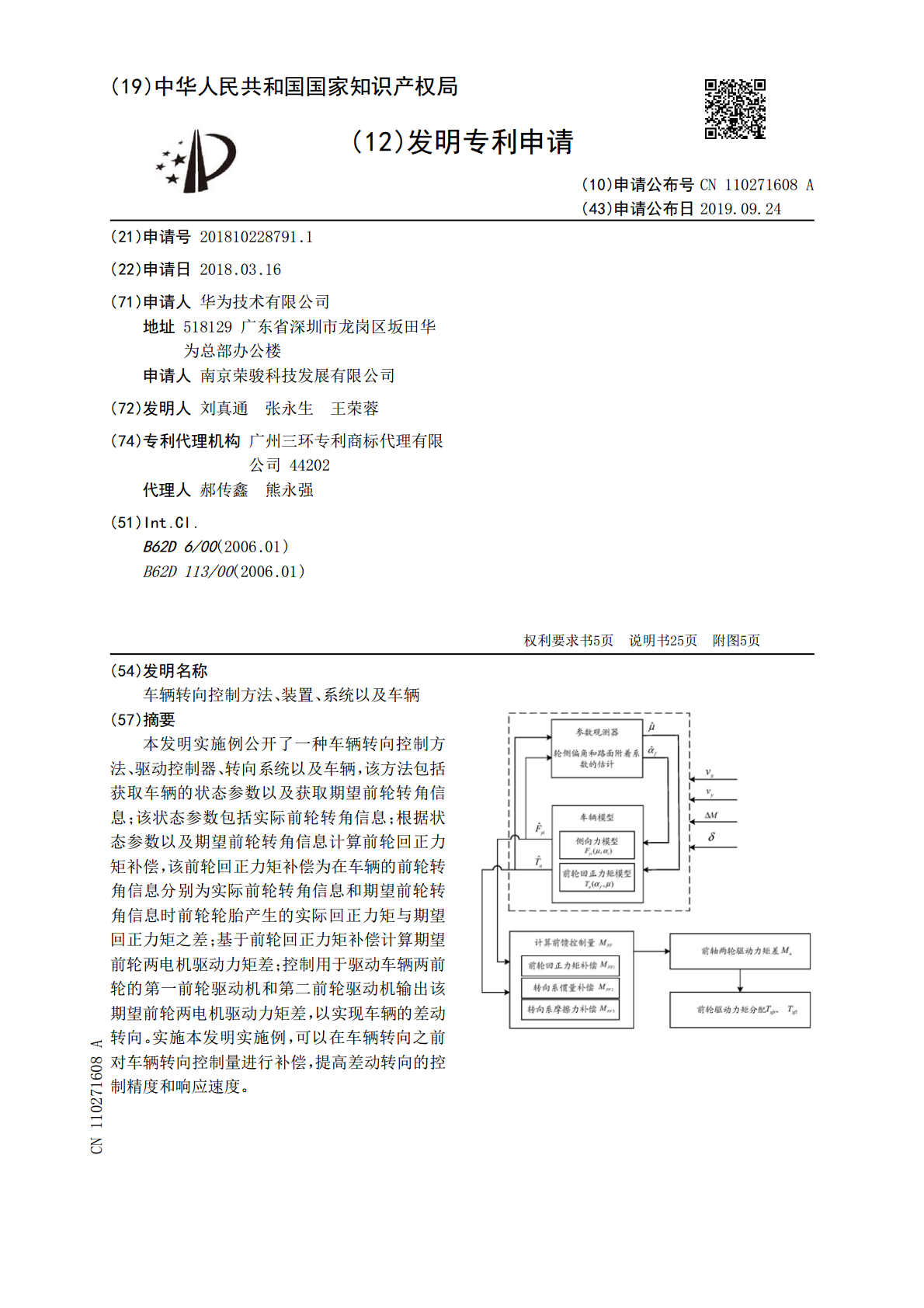
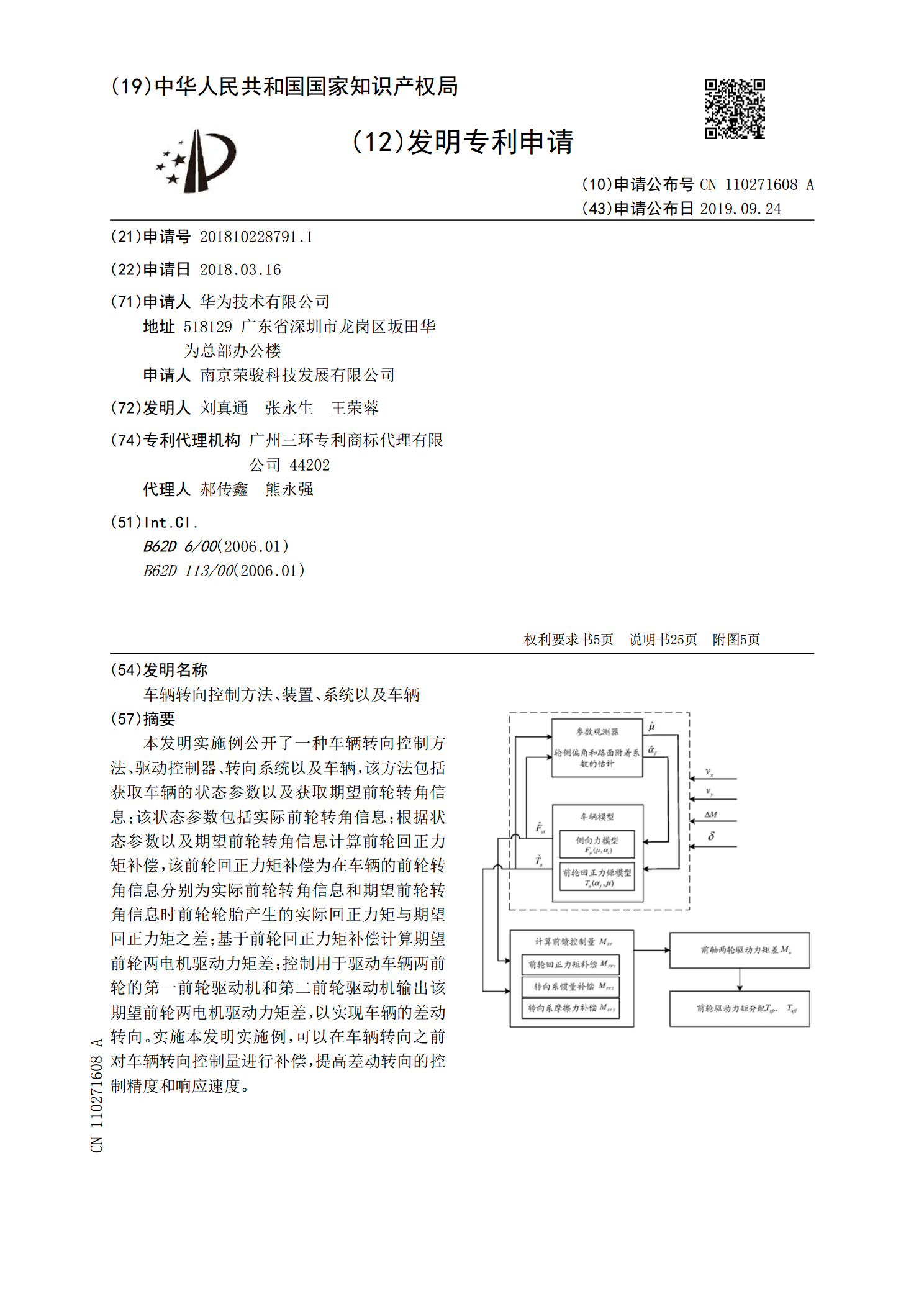
本发明实施例公开了一种车辆转向控制方法、驱动控制器、转向系统以及车辆,该方法包括获取车辆的状态参数以及获取期望前轮转角信息;该状态参数包括实际前轮转角信息;根据状态参数以及期望前轮转角信息计算前轮回正力矩补偿,该前轮回正力矩补偿为在车辆的前轮转角信息分别为实际前轮转角信息和期望前轮转角信息时前轮轮胎产生的实际回正力矩与期望回正力矩之差;基于前轮回正力矩补偿计算期望前轮两电机驱动力矩差;控制用于驱动车辆两前轮的第一前轮驱动机和第二前轮驱动机输出该期望前轮两电机驱动力矩差,以实现车辆的差动转向。实施本发明实施
车辆以及车辆的转向控制系统和方法、装置.pdf
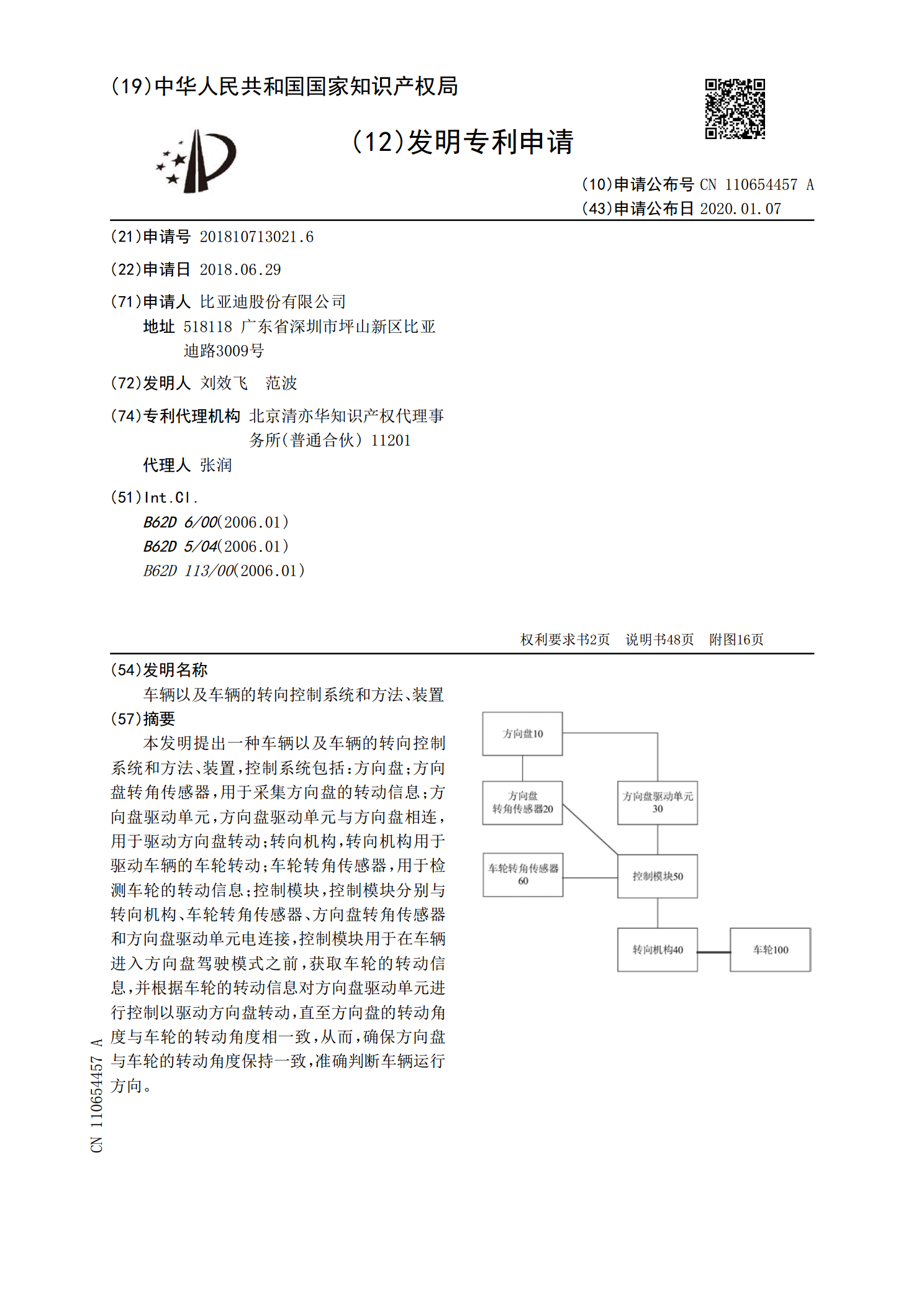
本发明提出一种车辆以及车辆的转向控制系统和方法、装置,控制系统包括:方向盘;方向盘转角传感器,用于采集方向盘的转动信息;方向盘驱动单元,方向盘驱动单元与方向盘相连,用于驱动方向盘转动;转向机构,转向机构用于驱动车辆的车轮转动;车轮转角传感器,用于检测车轮的转动信息;控制模块,控制模块分别与转向机构、车轮转角传感器、方向盘转角传感器和方向盘驱动单元电连接,控制模块用于在车辆进入方向盘驾驶模式之前,获取车轮的转动信息,并根据车轮的转动信息对方向盘驱动单元进行控制以驱动方向盘转动,直至方向盘的转动角度与车轮的转
车辆以及车辆的转向控制系统和方法、装置.pdf
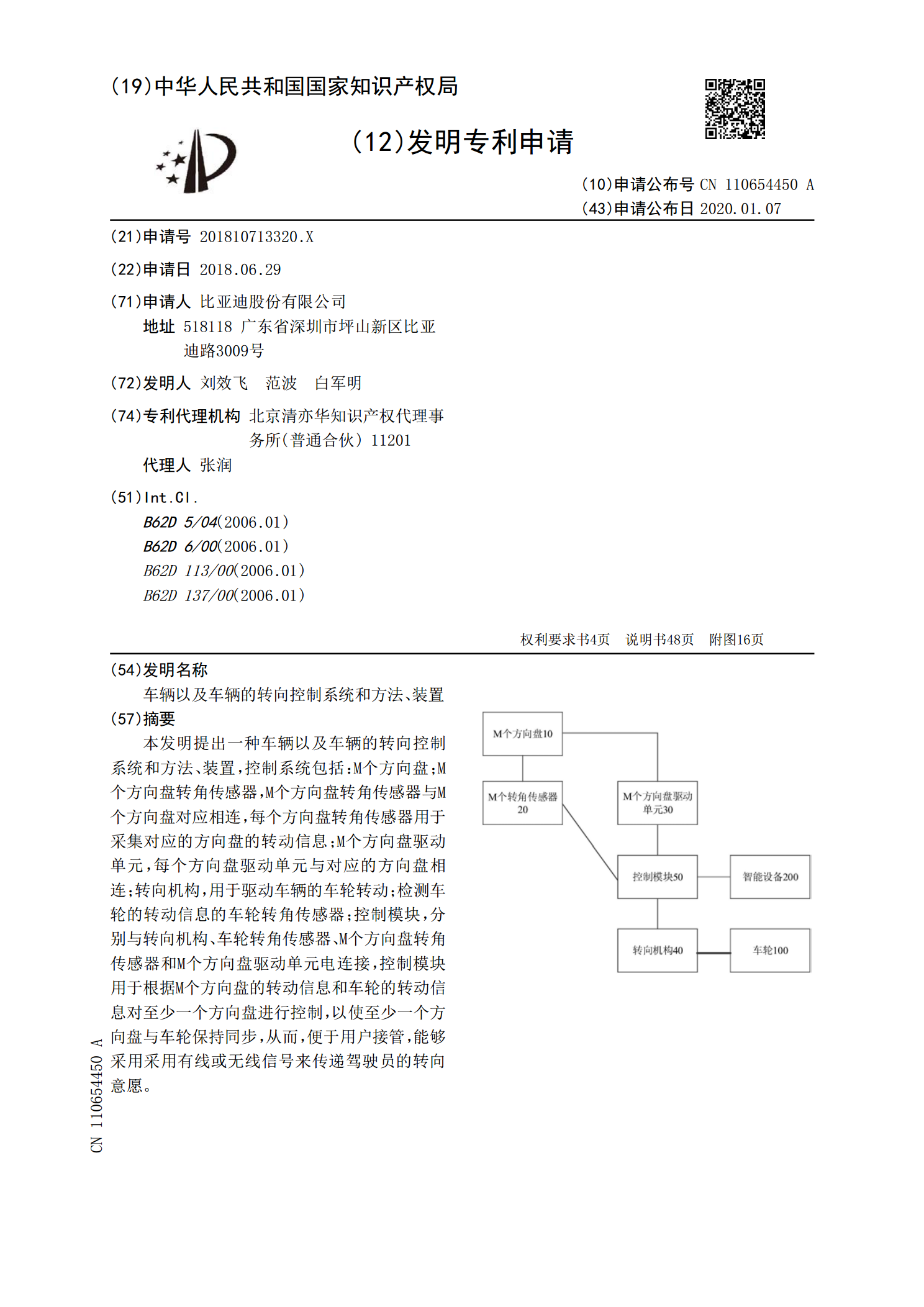
本发明提出一种车辆以及车辆的转向控制系统和方法、装置,控制系统包括:M个方向盘;M个方向盘转角传感器,M个方向盘转角传感器与M个方向盘对应相连,每个方向盘转角传感器用于采集对应的方向盘的转动信息;M个方向盘驱动单元,每个方向盘驱动单元与对应的方向盘相连;转向机构,用于驱动车辆的车轮转动;检测车轮的转动信息的车轮转角传感器;控制模块,分别与转向机构、车轮转角传感器、M个方向盘转角传感器和M个方向盘驱动单元电连接,控制模块用于根据M个方向盘的转动信息和车轮的转动信息对至少一个方向盘进行控制,以使至少一个方向盘
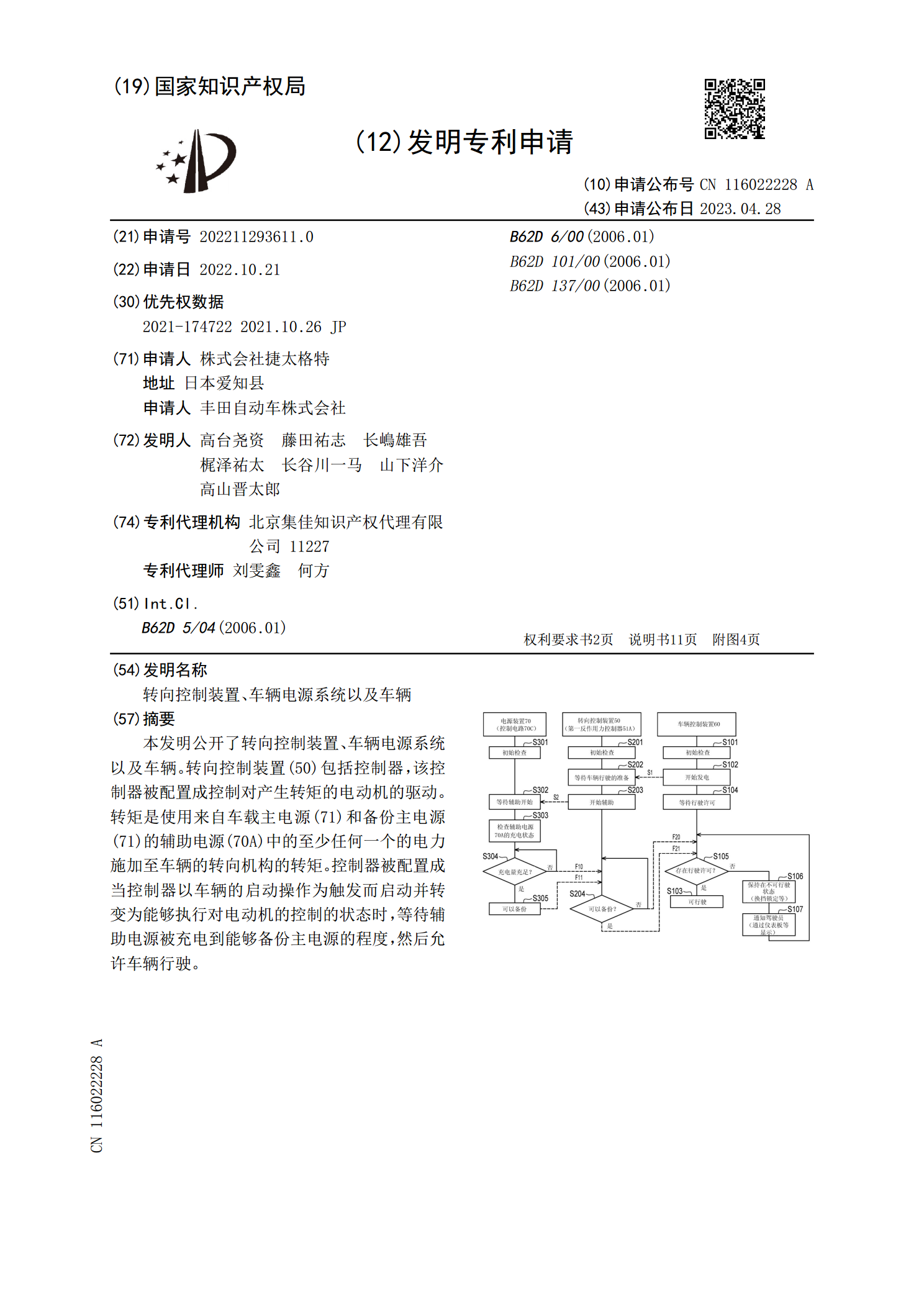
转向控制装置、车辆电源系统以及车辆.pdf
本发明公开了转向控制装置、车辆电源系统以及车辆。转向控制装置(50)包括控制器,该控制器被配置成控制对产生转矩的电动机的驱动。转矩是使用来自车载主电源(71)和备份主电源(71)的辅助电源(70A)中的至少任何一个的电力施加至车辆的转向机构的转矩。控制器被配置成当控制器以车辆的启动操作为触发而启动并转变为能够执行对电动机的控制的状态时,等待辅助电源被充电到能够备份主电源的程度,然后允许车辆行驶。
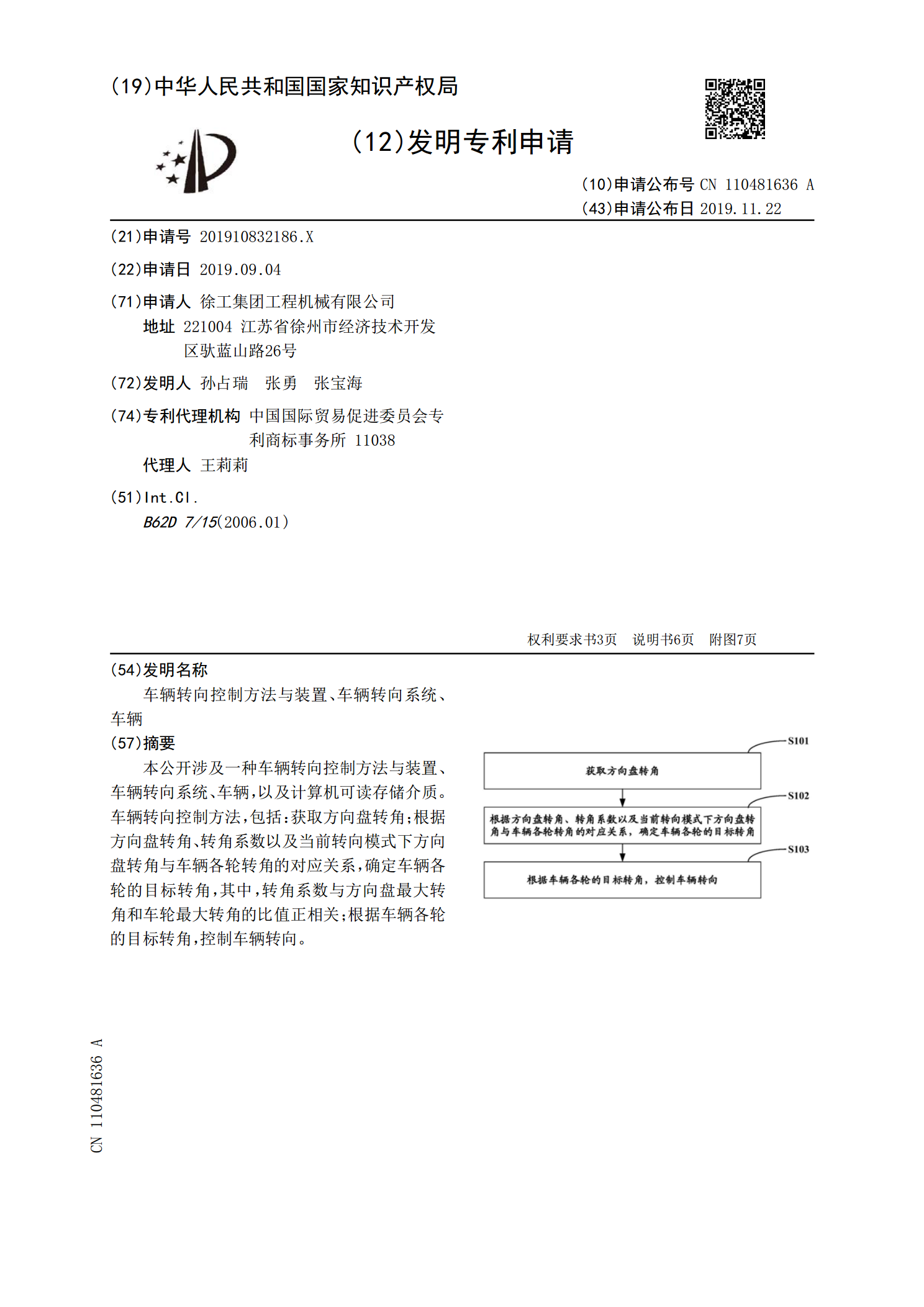
车辆转向控制方法与装置、车辆转向系统、车辆.pdf
本公开涉及一种车辆转向控制方法与装置、车辆转向系统、车辆,以及计算机可读存储介质。车辆转向控制方法,包括:获取方向盘转角;根据方向盘转角、转角系数以及当前转向模式下方向盘转角与车辆各轮转角的对应关系,确定车辆各轮的目标转角,其中,转角系数与方向盘最大转角和车轮最大转角的比值正相关;根据车辆各轮的目标转角,控制车辆转向。