
无人移动装置的转弯控制方法、装置、系统及存储介质.pdf

努力****甲寅


1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人移动装置的转弯控制方法、装置、系统及存储介质.pdf
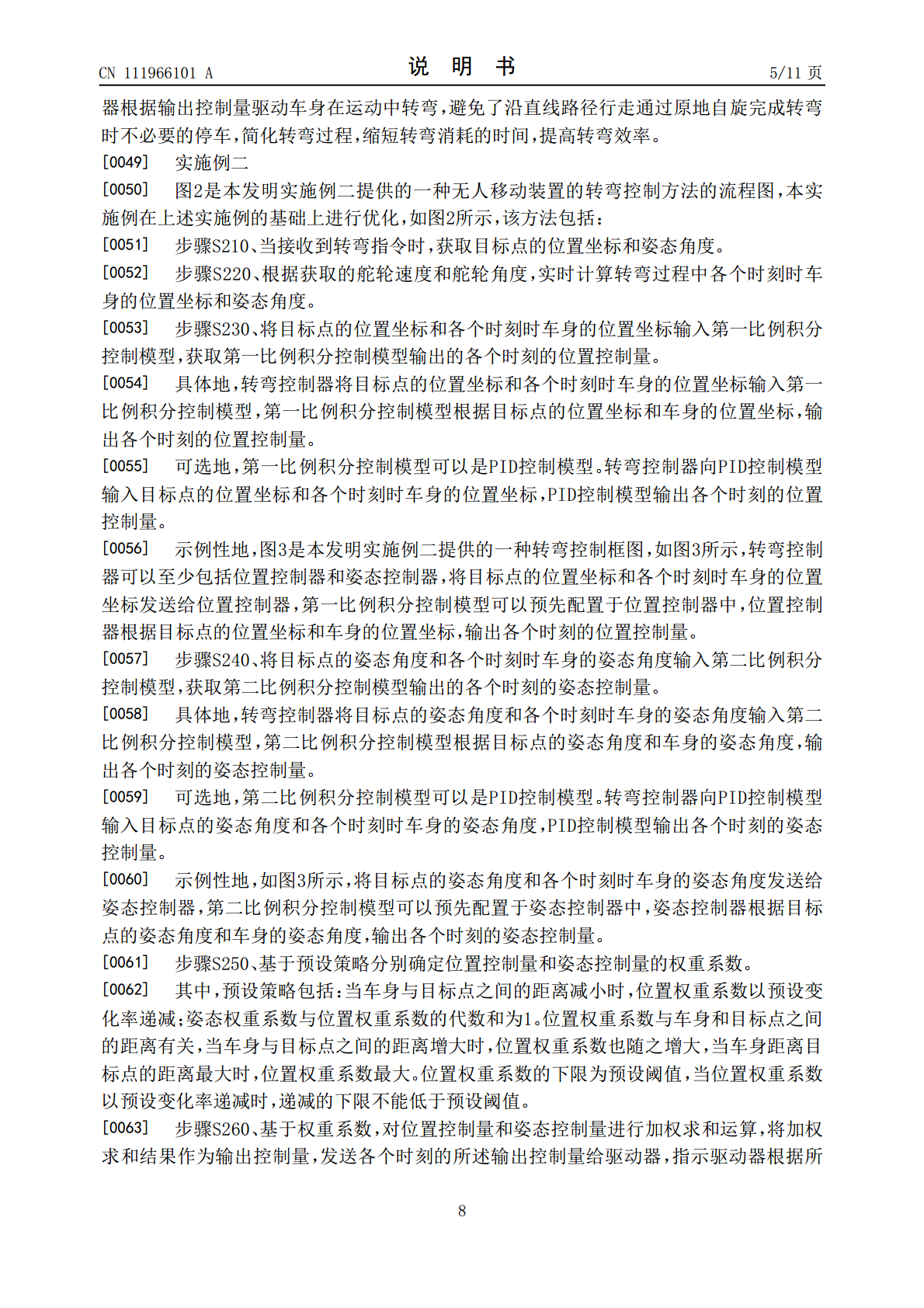
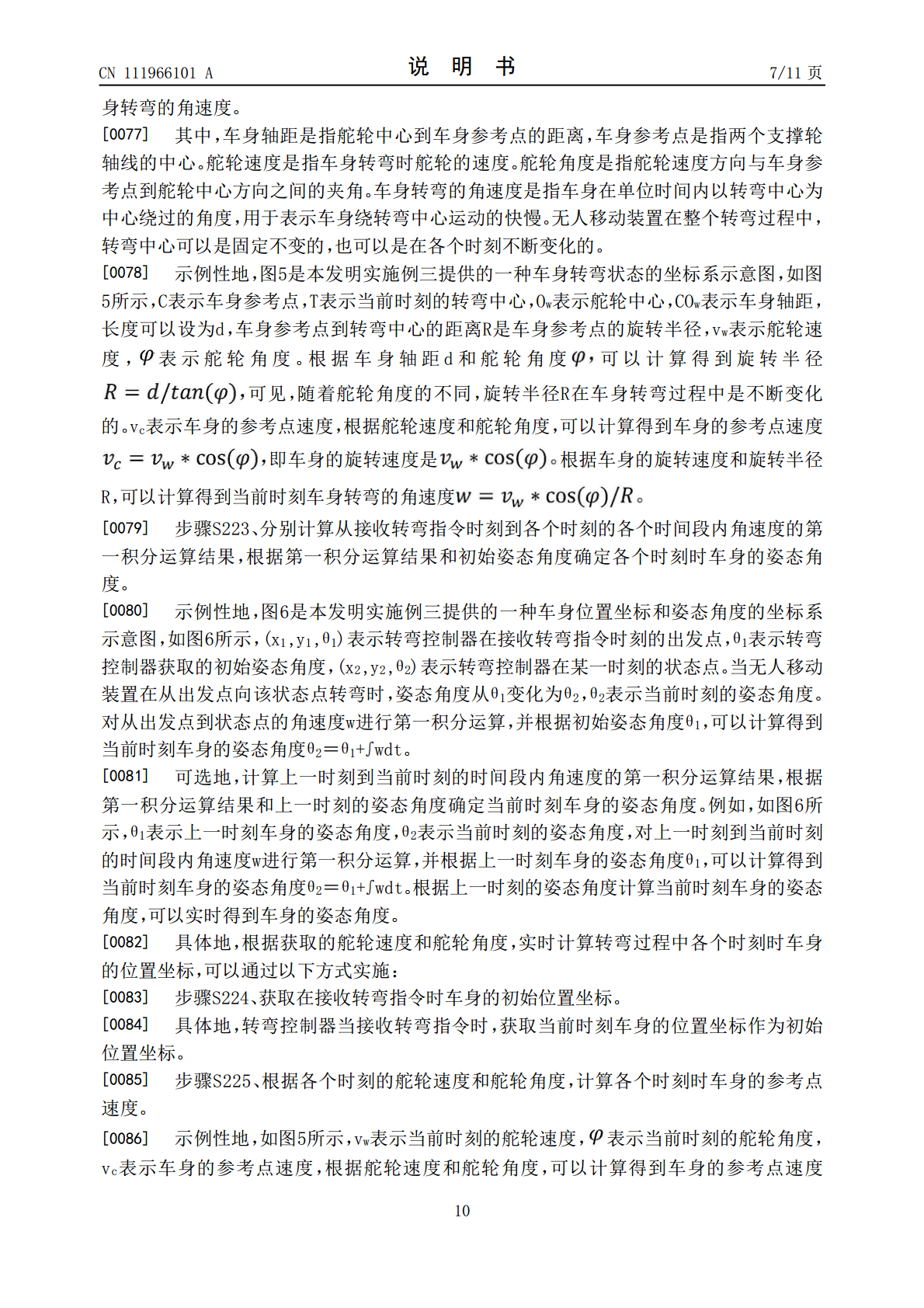
本发明实施例公开了无人移动装置的转弯控制方法、装置、系统及存储介质。该方法包括:当接收到转弯指令时,获取目标点的位置坐标和姿态角度;根据获取的舵轮速度和舵轮角度,实时计算转弯过程中各个时刻时车身的位置坐标和姿态角度;根据目标点的位置坐标和各个时刻时车身的位置坐标,确定各个时刻的位置控制量,根据目标点的姿态角度和各个时刻时车身的姿态角度,确定各个时刻的姿态控制量;根据位置控制量和姿态控制量,确定各个时刻的输出控制量,发送各个时刻的输出控制量给驱动器,指示驱动器根据输出控制量驱动车身在运动中转弯。通过实时计算

移动装置的运行控制方法、装置、存储介质及移动装置.pdf
本发明提供了一种移动装置的运行控制方法、装置、存储介质及移动装置,方法包括:获取自动导航移动装置的行驶路线信息,所述行驶路线信息包括信息码的位置;判断所述自动导航移动装置是否行驶到所述信息码的位置处,响应于确定所述自动导航移动装置行驶到所述信息码的位置处,控制读码模块读取信息码的信息;若所述读码模块读取到所述信息码的信息,则控制所述自动导航移动装置继续行驶;若所述读码模块未读取到所述信息码的信息,则控制所述自动导航移动装置停止行驶,控制所述读码模块重启,重新读取所述信息码的信息。本发明的技术方案能够提高读
转弯控制方法、装置、计算机可读存储介质及无人机.pdf
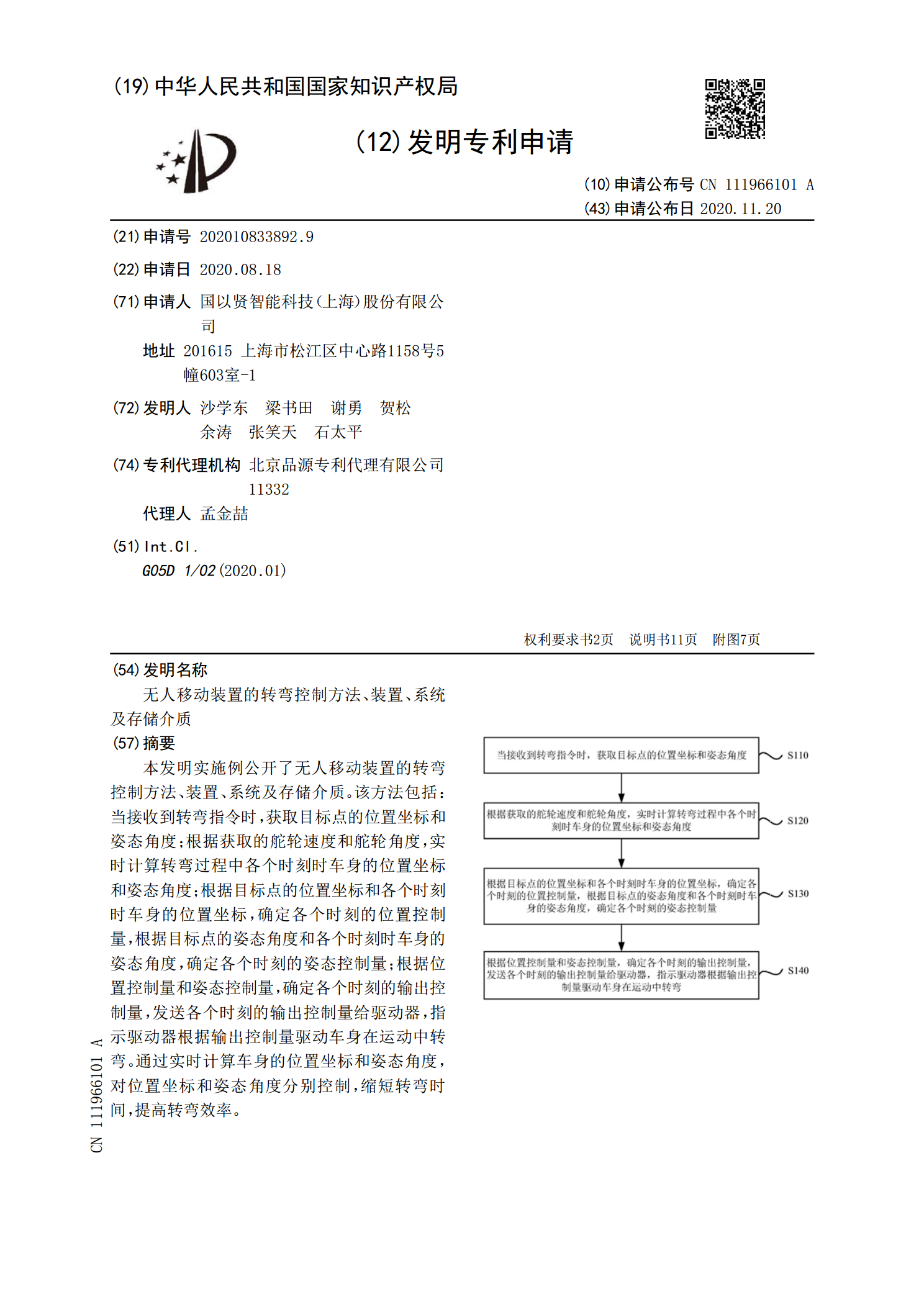
本公开涉及一种转弯控制方法、装置、计算机可读存储介质及无人机。该转弯控制方法应用于无人机,包括:在与所述无人机通信连接的车辆驶入弯道前,获取所述车辆的弯道盲区处的路面参数和车辆信息;根据所述路面参数和所述车辆信息,预测所述车辆经过所述弯道盲区时的侧滑临界速度;将所述侧滑临界速度发送至所述车辆,以使所述车辆能够根据所述侧滑临界速度进行转弯控制。这样,车辆可以根据该侧滑临界速度控制转弯速度,减小了车辆转弯时发生侧滑的风险,提升了行车安全性。由此,当用户不熟悉路况(例如,开车旅游)时,即使车辆配置不好,例如,不
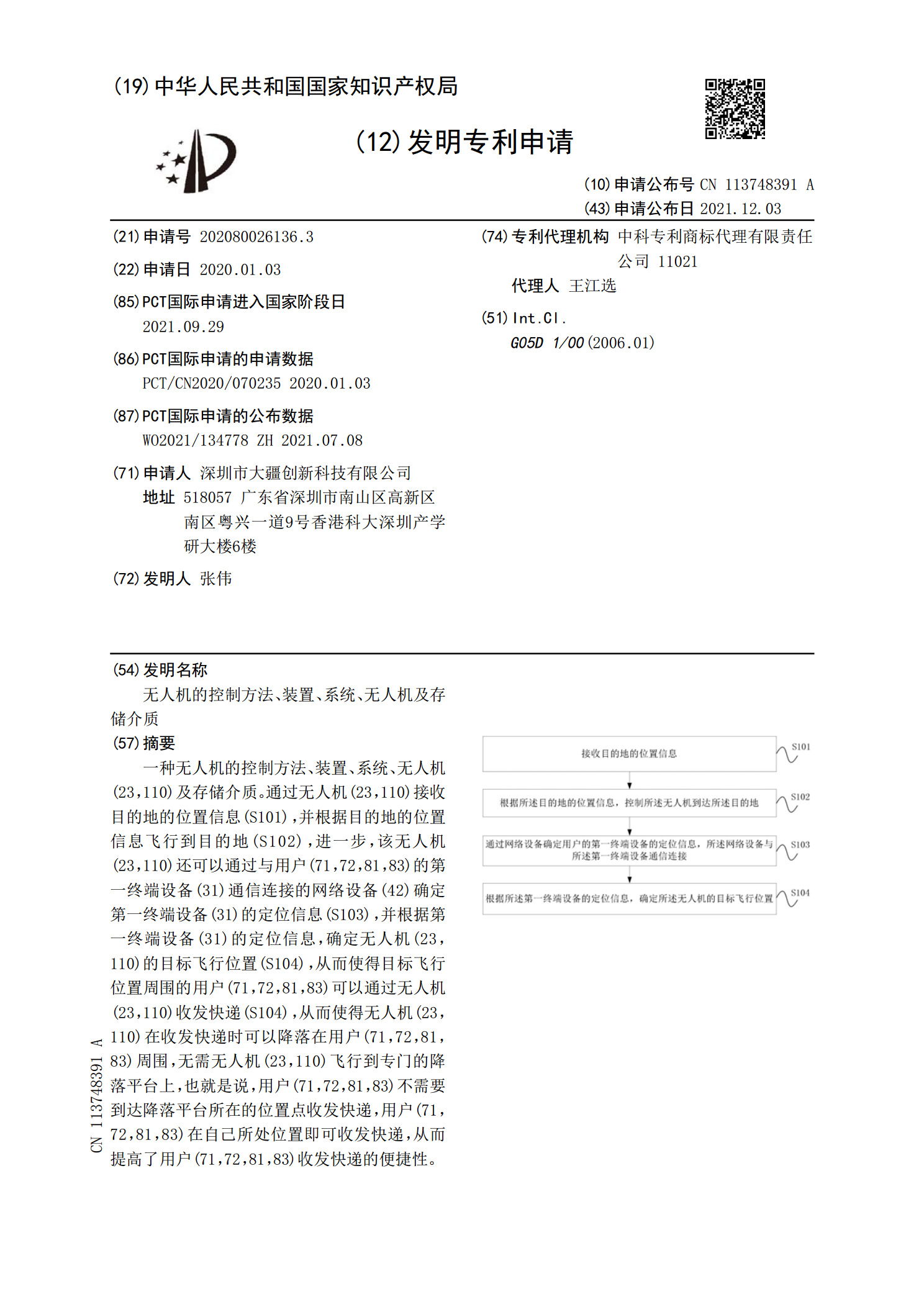
无人机的控制方法、装置、系统、无人机及存储介质.pdf
一种无人机的控制方法、装置、系统、无人机(23,110)及存储介质。通过无人机(23,110)接收目的地的位置信息(S101),并根据目的地的位置信息飞行到目的地(S102),进一步,该无人机(23,110)还可以通过与用户(71,72,81,83)的第一终端设备(31)通信连接的网络设备(42)确定第一终端设备(31)的定位信息(S103),并根据第一终端设备(31)的定位信息,确定无人机(23,110)的目标飞行位置(S104),从而使得目标飞行位置周围的用户(71,72,81,83)可以通过无人机(
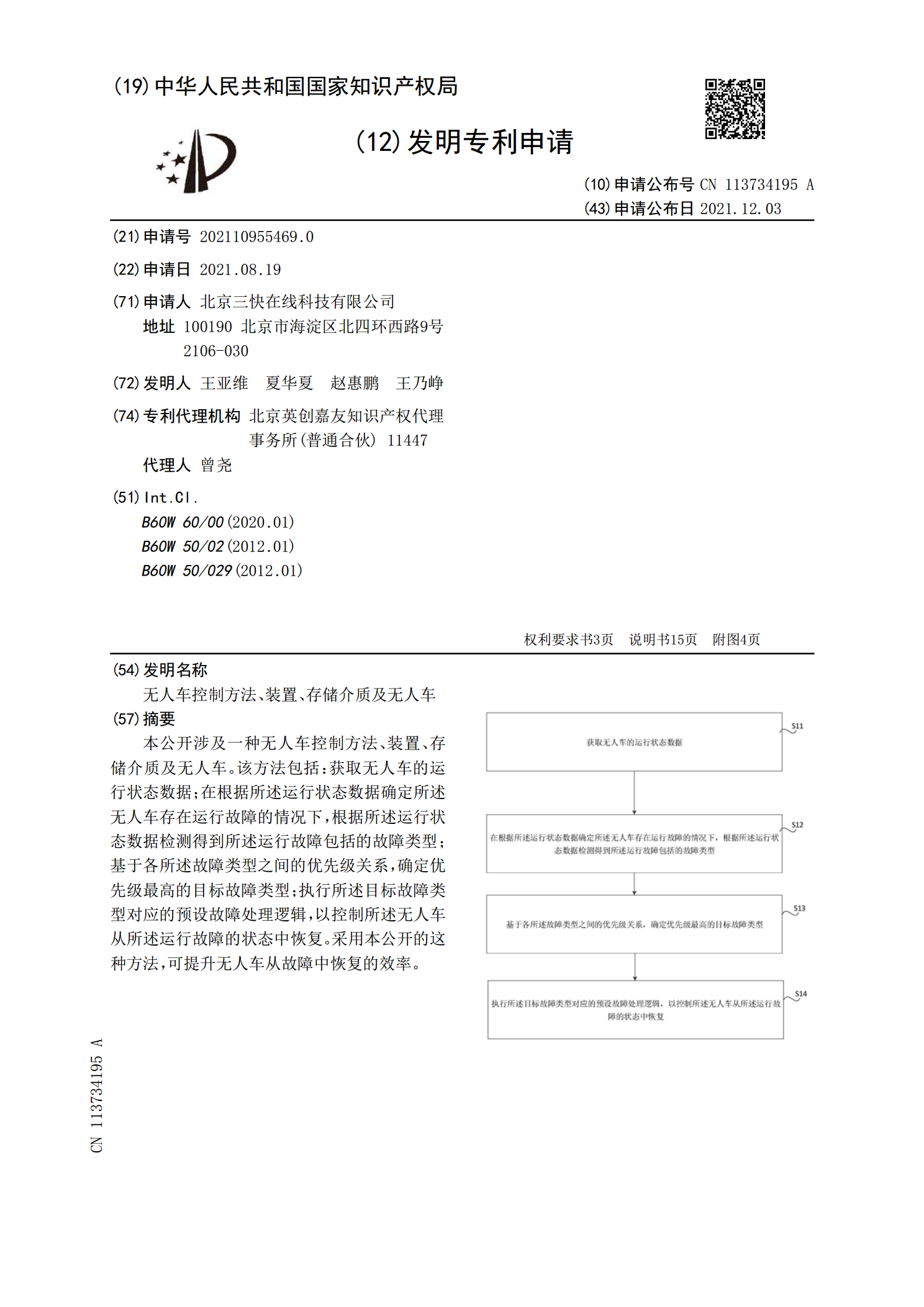
无人车控制方法、装置、存储介质及无人车.pdf
本公开涉及一种无人车控制方法、装置、存储介质及无人车。该方法包括:获取无人车的运行状态数据;在根据所述运行状态数据确定所述无人车存在运行故障的情况下,根据所述运行状态数据检测得到所述运行故障包括的故障类型;基于各所述故障类型之间的优先级关系,确定优先级最高的目标故障类型;执行所述目标故障类型对应的预设故障处理逻辑,以控制所述无人车从所述运行故障的状态中恢复。采用本公开的这种方法,可提升无人车从故障中恢复的效率。