
转弯控制方法、装置、计算机可读存储介质及无人机.pdf

猫巷****晓容

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
转弯控制方法、装置、计算机可读存储介质及无人机.pdf
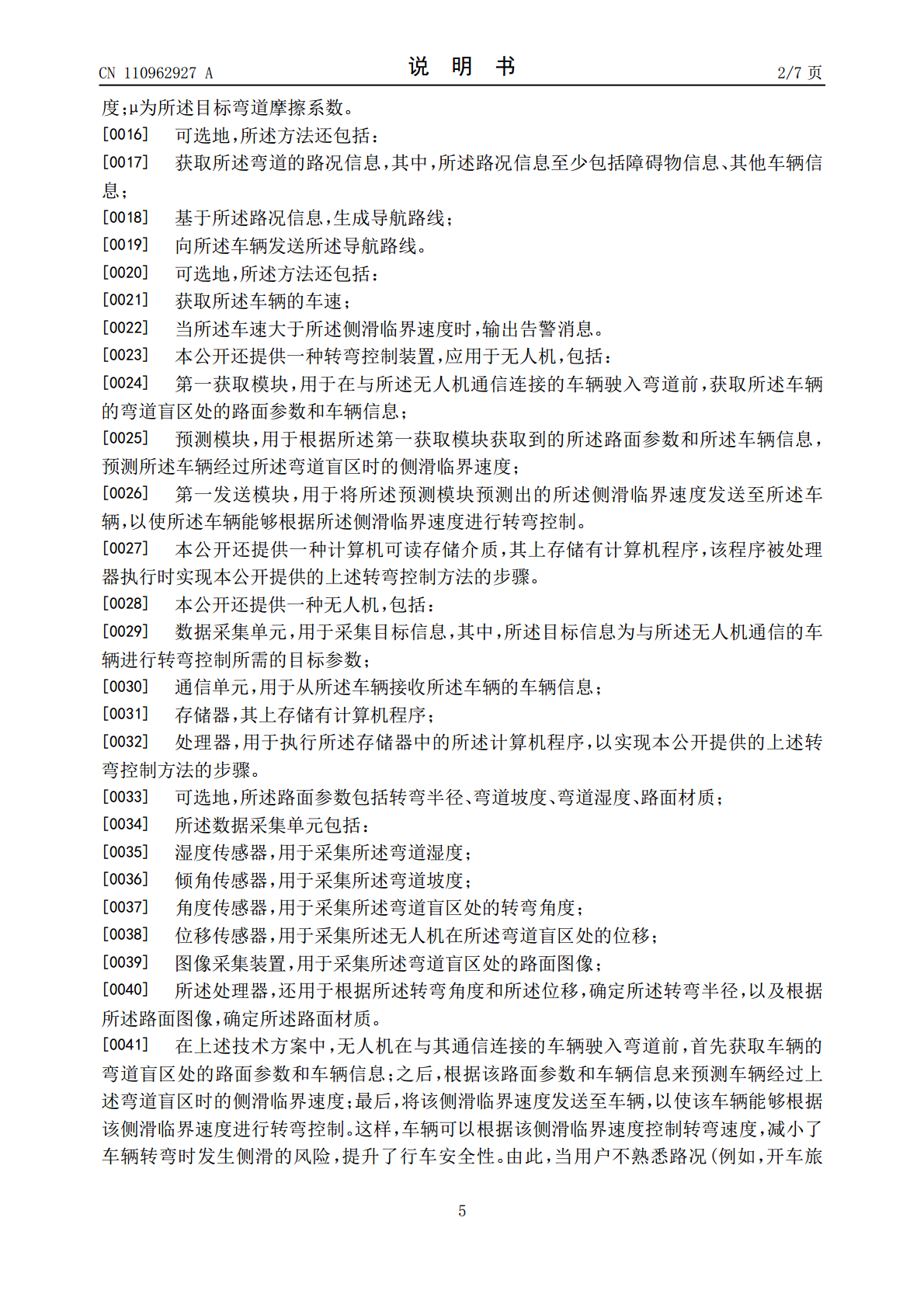
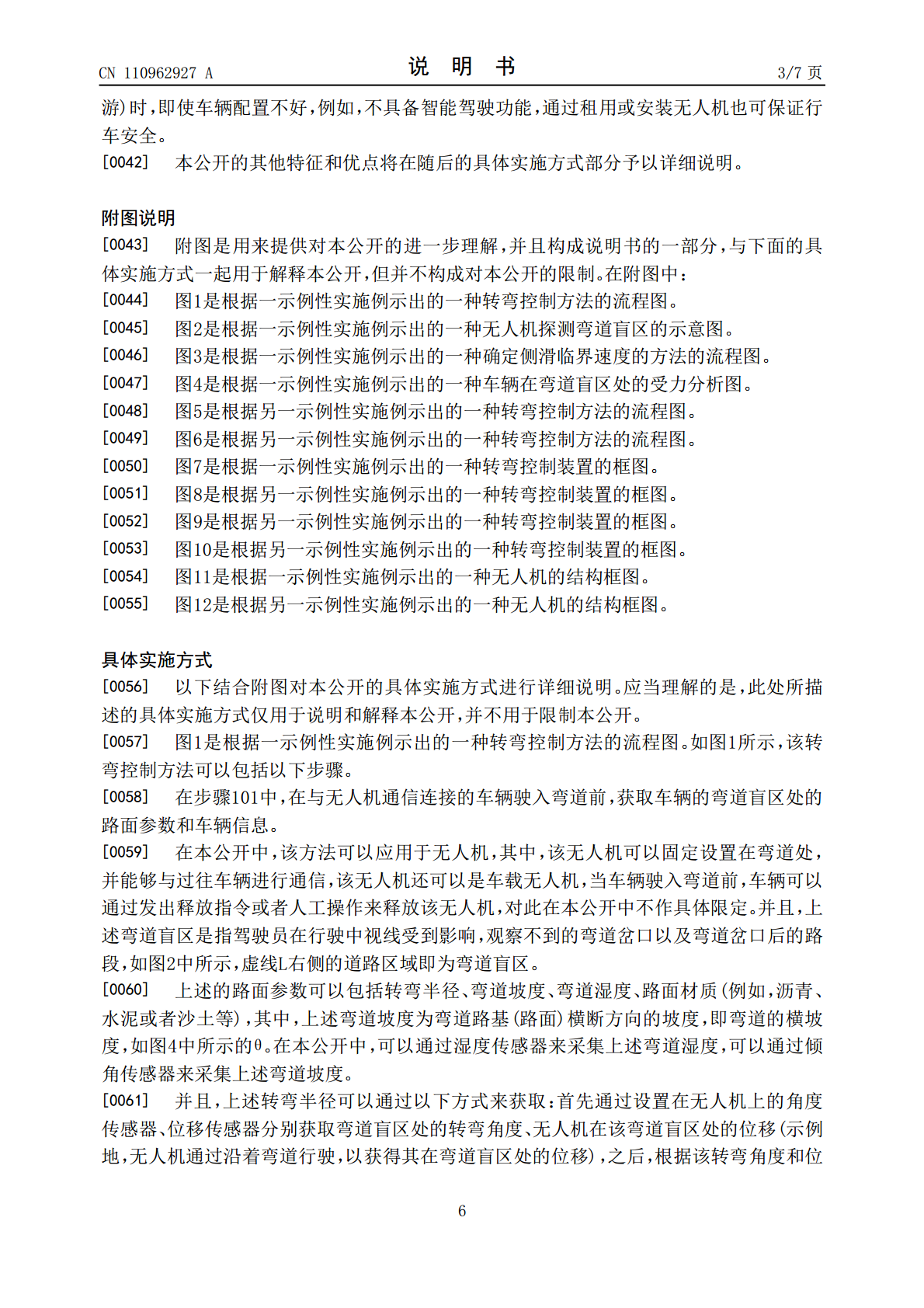
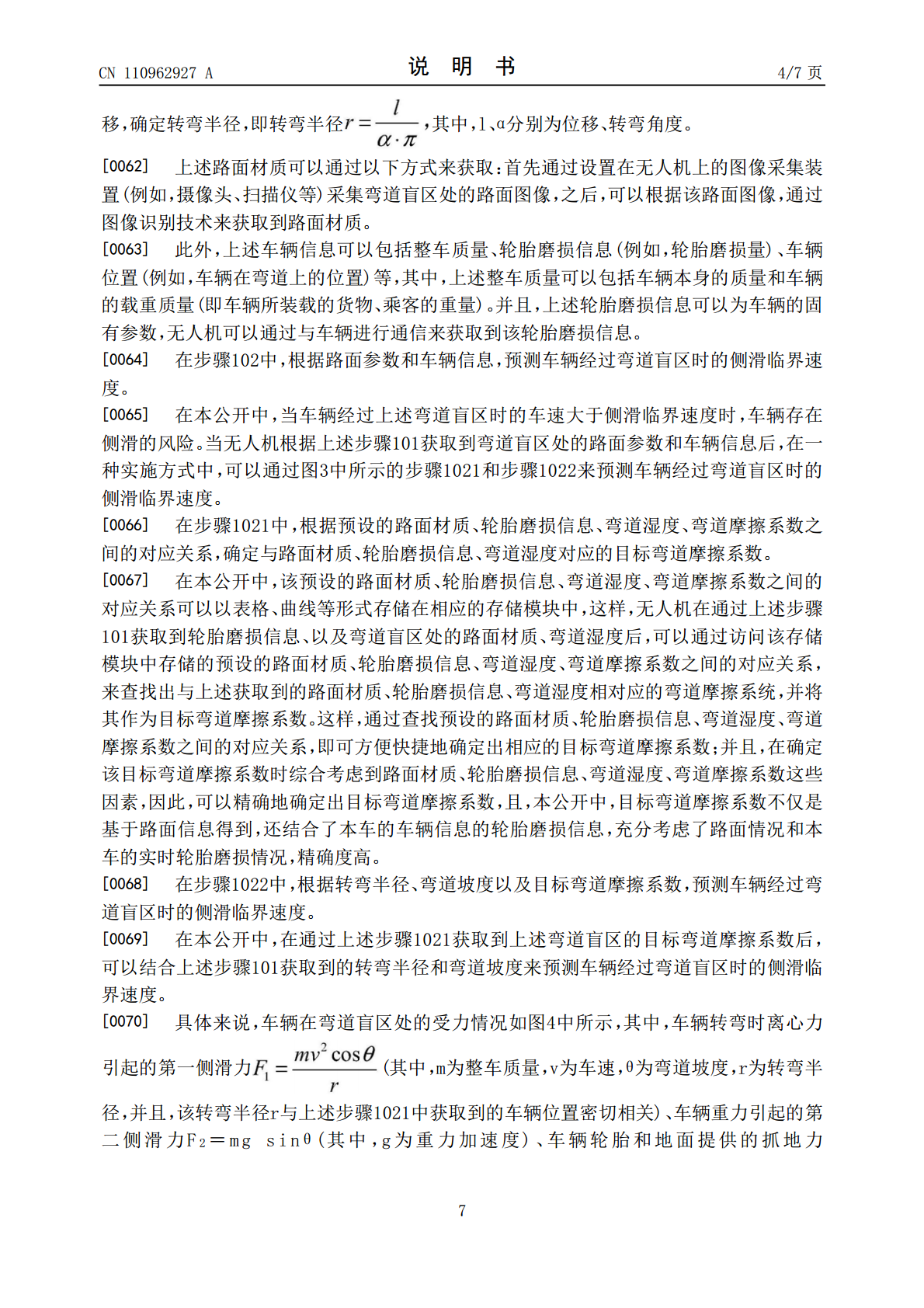
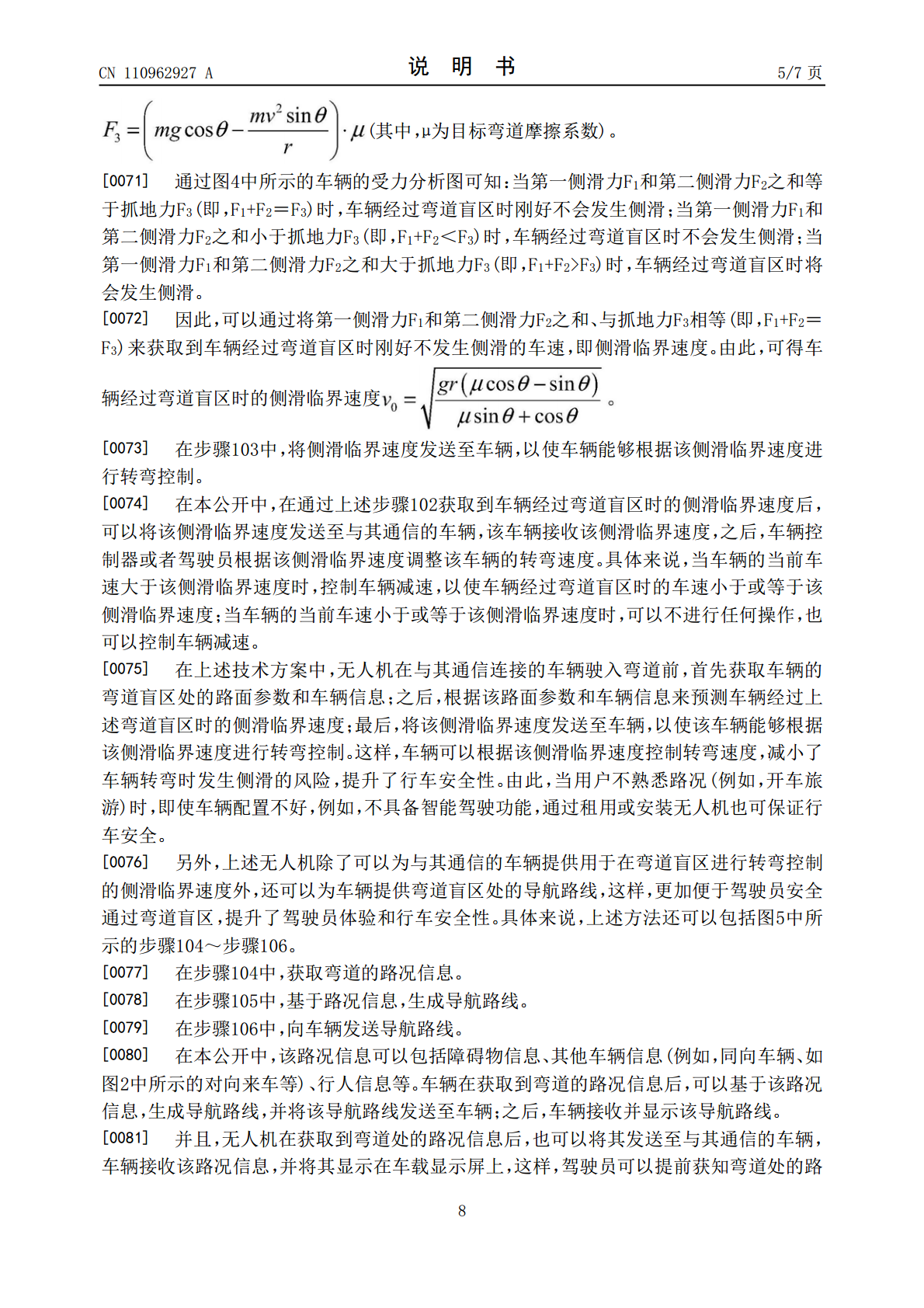
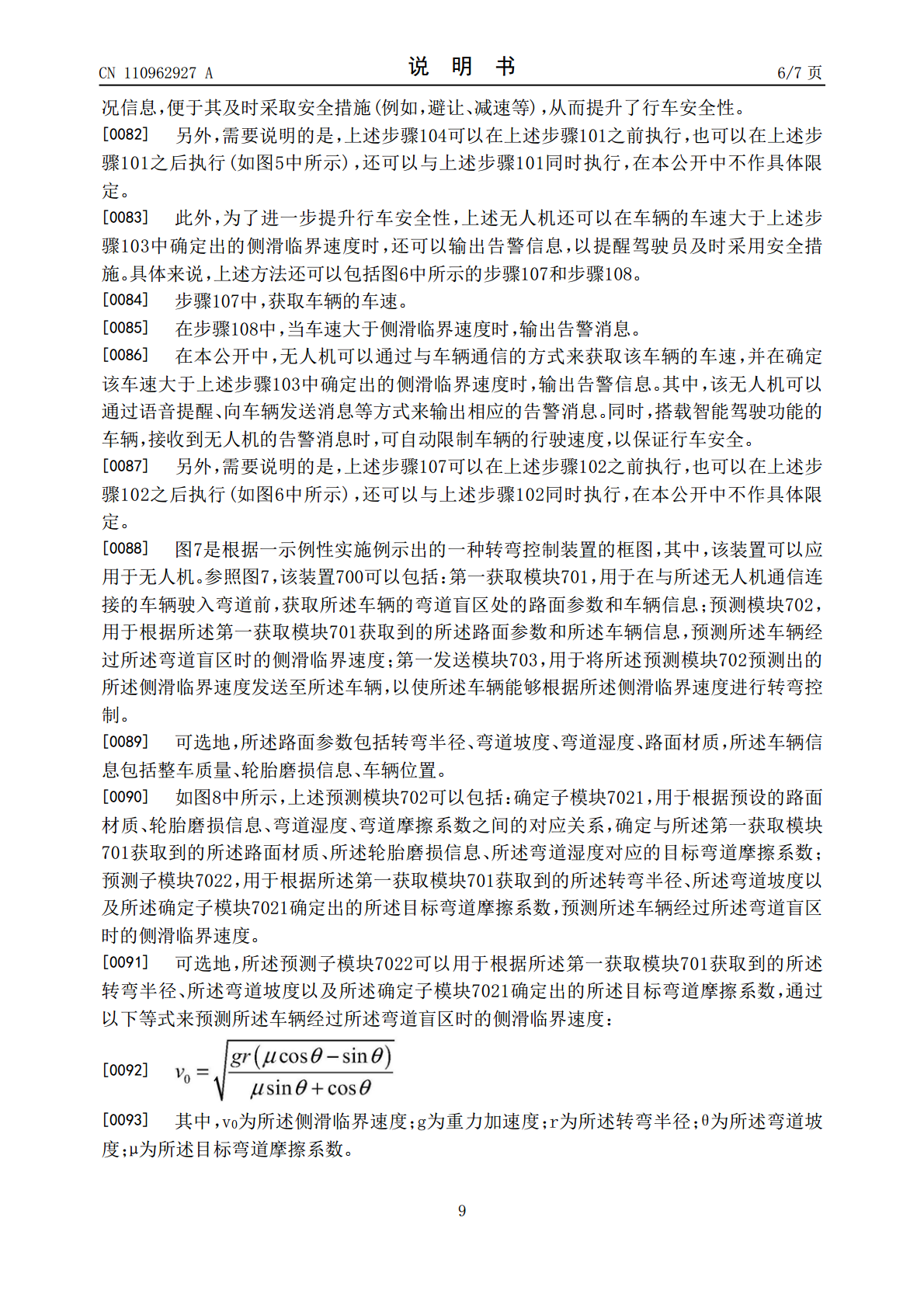
本公开涉及一种转弯控制方法、装置、计算机可读存储介质及无人机。该转弯控制方法应用于无人机,包括:在与所述无人机通信连接的车辆驶入弯道前,获取所述车辆的弯道盲区处的路面参数和车辆信息;根据所述路面参数和所述车辆信息,预测所述车辆经过所述弯道盲区时的侧滑临界速度;将所述侧滑临界速度发送至所述车辆,以使所述车辆能够根据所述侧滑临界速度进行转弯控制。这样,车辆可以根据该侧滑临界速度控制转弯速度,减小了车辆转弯时发生侧滑的风险,提升了行车安全性。由此,当用户不熟悉路况(例如,开车旅游)时,即使车辆配置不好,例如,不
无人机控制方法、装置及计算机可读存储介质.pdf
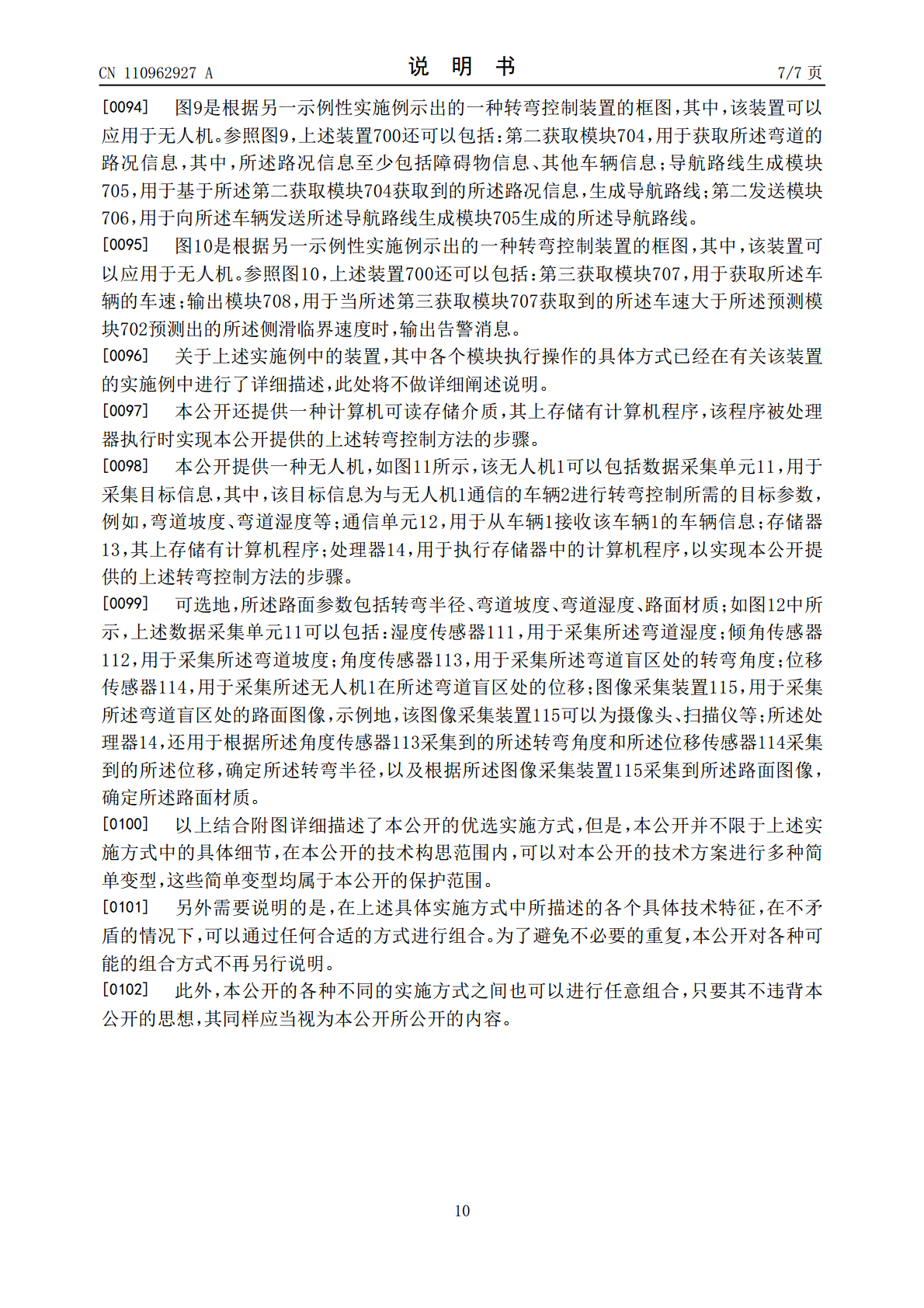
本申请公开了一种无人机控制方法、装置及计算机可读存储介质。本申请提供的无人机控制方法包括:获取摄像机模块采集到的初始手势图像;对初始手势图像进行预处理,得到目标手势图像;根据预设的神经网络模型对目标手势图像进行识别,得到控制信息;根据控制信息对无人机进行控制。本申请提供的无人机控制方法提高了无人机的控制效率。
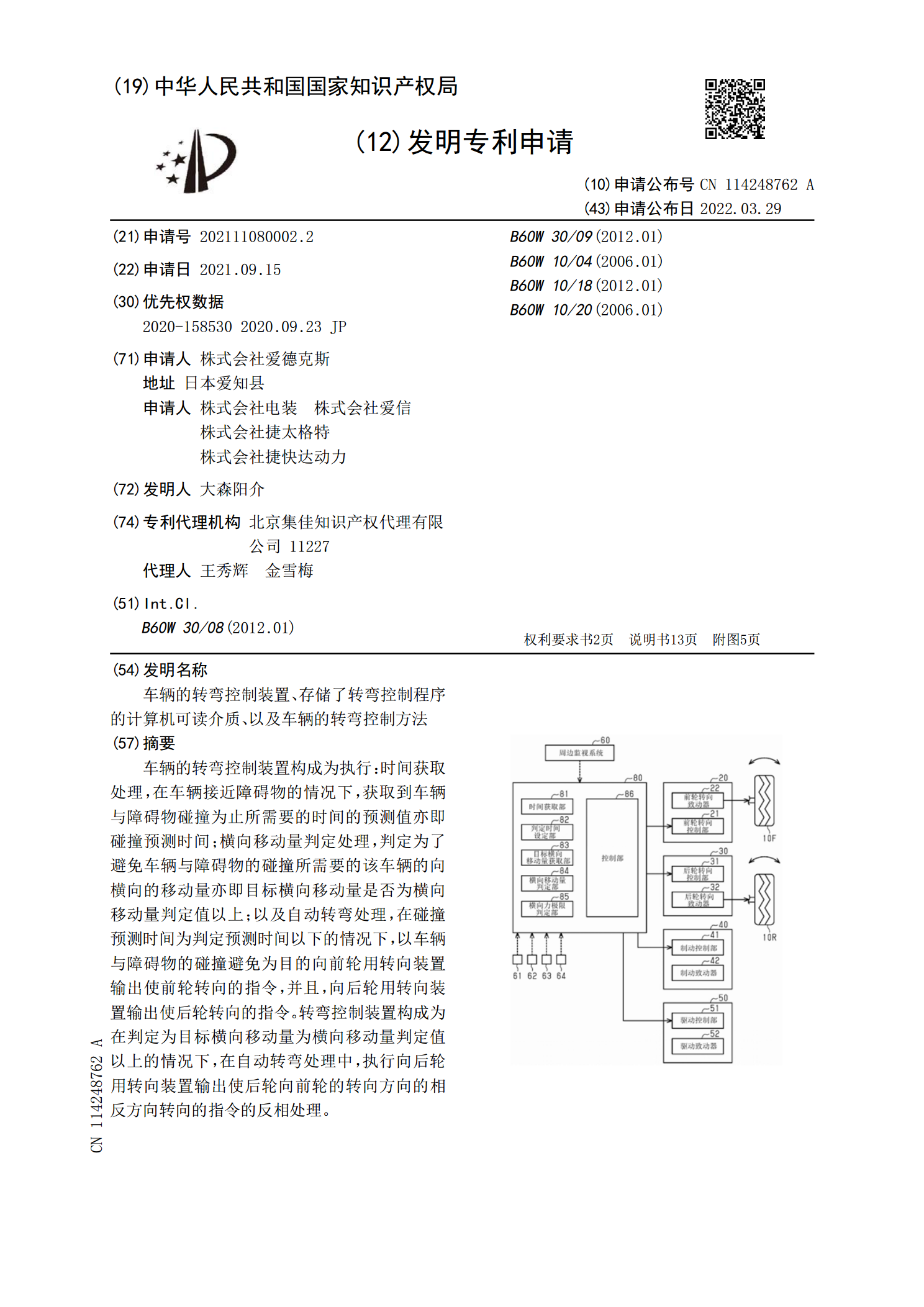
车辆的转弯控制装置、存储了转弯控制程序的计算机可读介质、以及车辆的转弯控制方法.pdf
车辆的转弯控制装置构成为执行:时间获取处理,在车辆接近障碍物的情况下,获取到车辆与障碍物碰撞为止所需要的时间的预测值亦即碰撞预测时间;横向移动量判定处理,判定为了避免车辆与障碍物的碰撞所需要的该车辆的向横向的移动量亦即目标横向移动量是否为横向移动量判定值以上;以及自动转弯处理,在碰撞预测时间为判定预测时间以下的情况下,以车辆与障碍物的碰撞避免为目的向前轮用转向装置输出使前轮转向的指令,并且,向后轮用转向装置输出使后轮转向的指令。转弯控制装置构成为在判定为目标横向移动量为横向移动量判定值以上的情况下,在自动
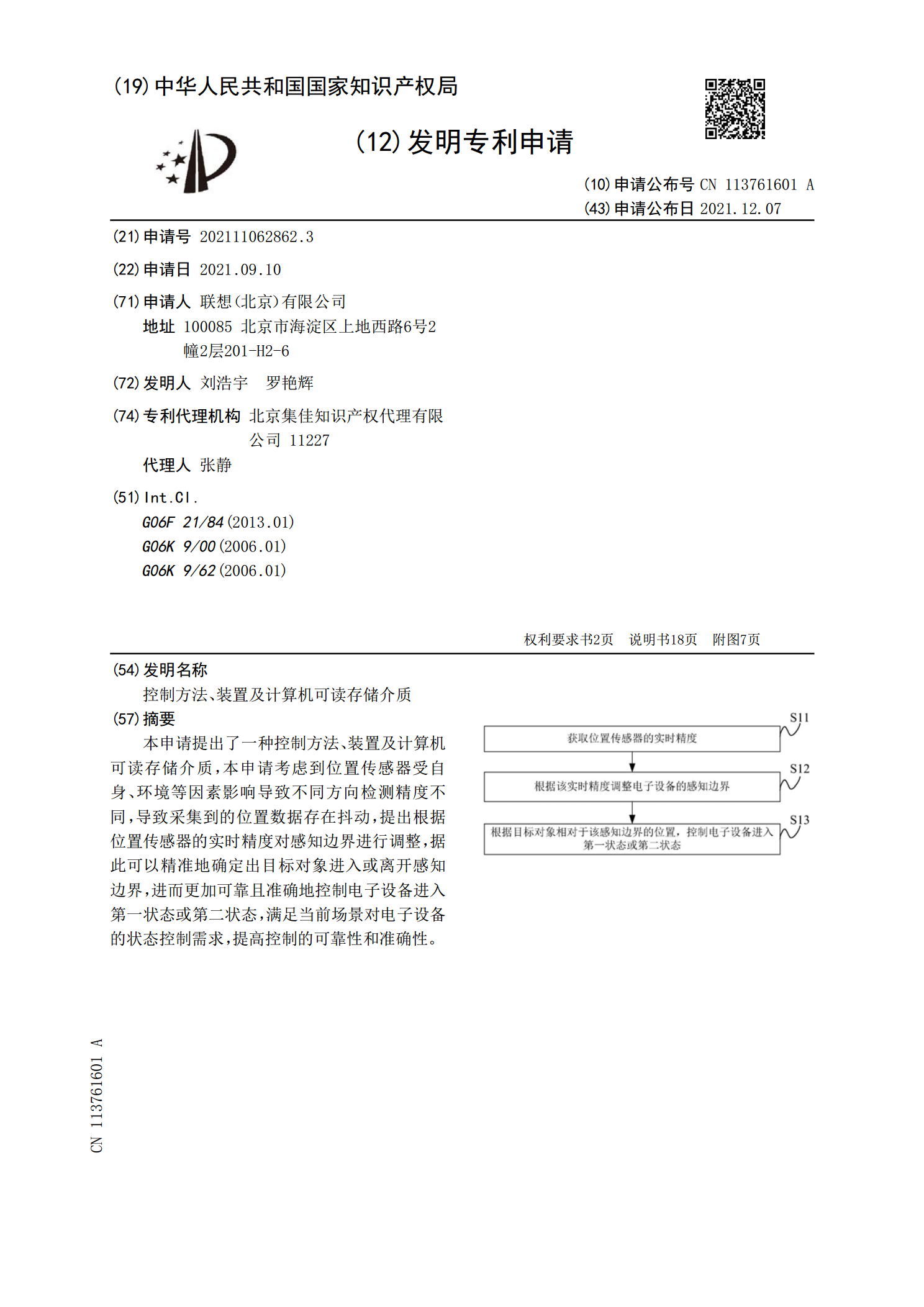
控制方法、装置及计算机可读存储介质.pdf
本申请提出了一种控制方法、装置及计算机可读存储介质,本申请考虑到位置传感器受自身、环境等因素影响导致不同方向检测精度不同,导致采集到的位置数据存在抖动,提出根据位置传感器的实时精度对感知边界进行调整,据此可以精准地确定出目标对象进入或离开感知边界,进而更加可靠且准确地控制电子设备进入第一状态或第二状态,满足当前场景对电子设备的状态控制需求,提高控制的可靠性和准确性。
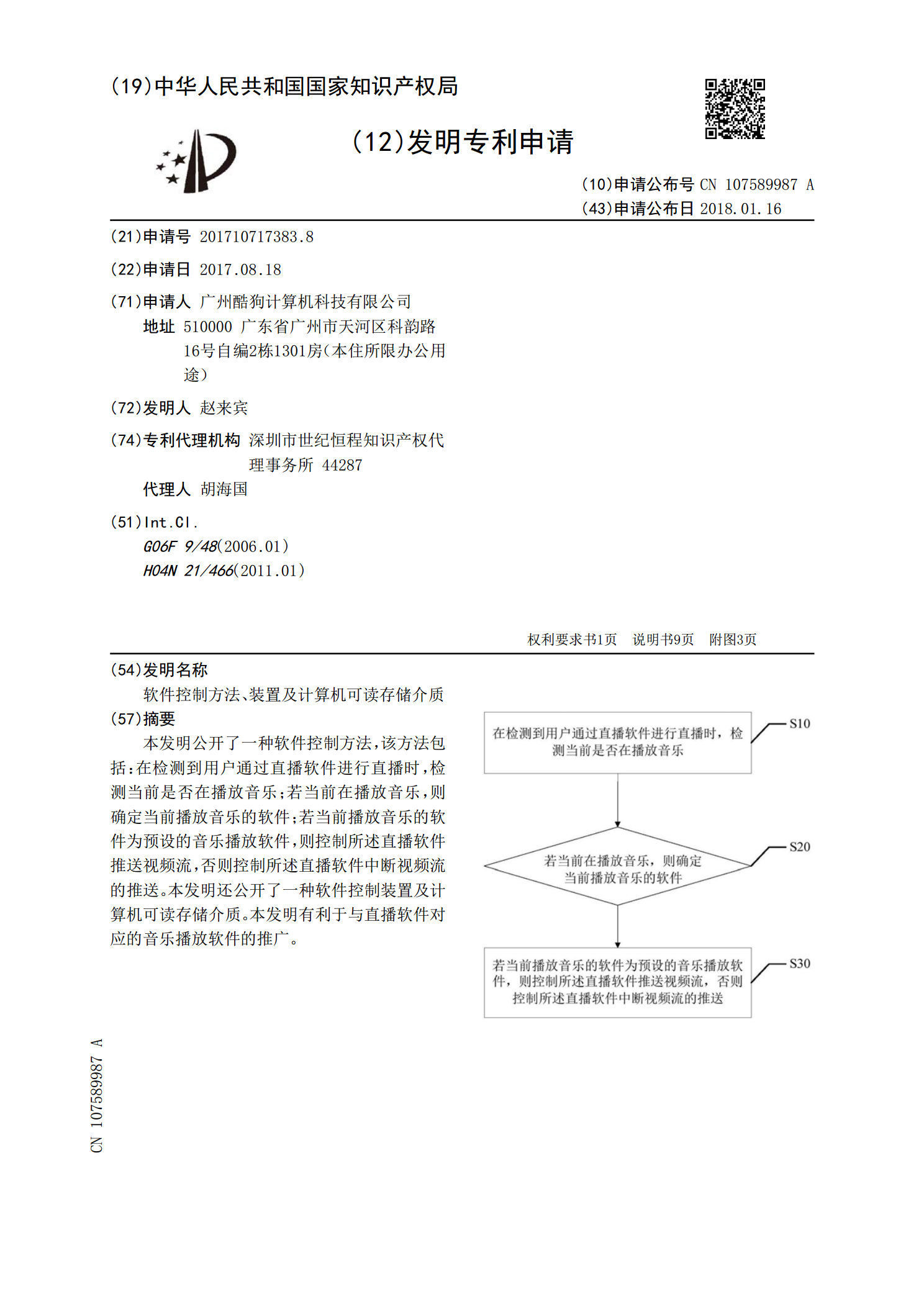
软件控制方法、装置及计算机可读存储介质.pdf
本发明公开了一种软件控制方法,该方法包括:在检测到用户通过直播软件进行直播时,检测当前是否在播放音乐;若当前在播放音乐,则确定当前播放音乐的软件;若当前播放音乐的软件为预设的音乐播放软件,则控制所述直播软件推送视频流,否则控制所述直播软件中断视频流的推送。本发明还公开了一种软件控制装置及计算机可读存储介质。本发明有利于与直播软件对应的音乐播放软件的推广。