
无人驾驶车辆制动控制方法、控制系统及车辆.pdf

建英****66

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人驾驶车辆制动控制方法、控制系统及车辆.pdf
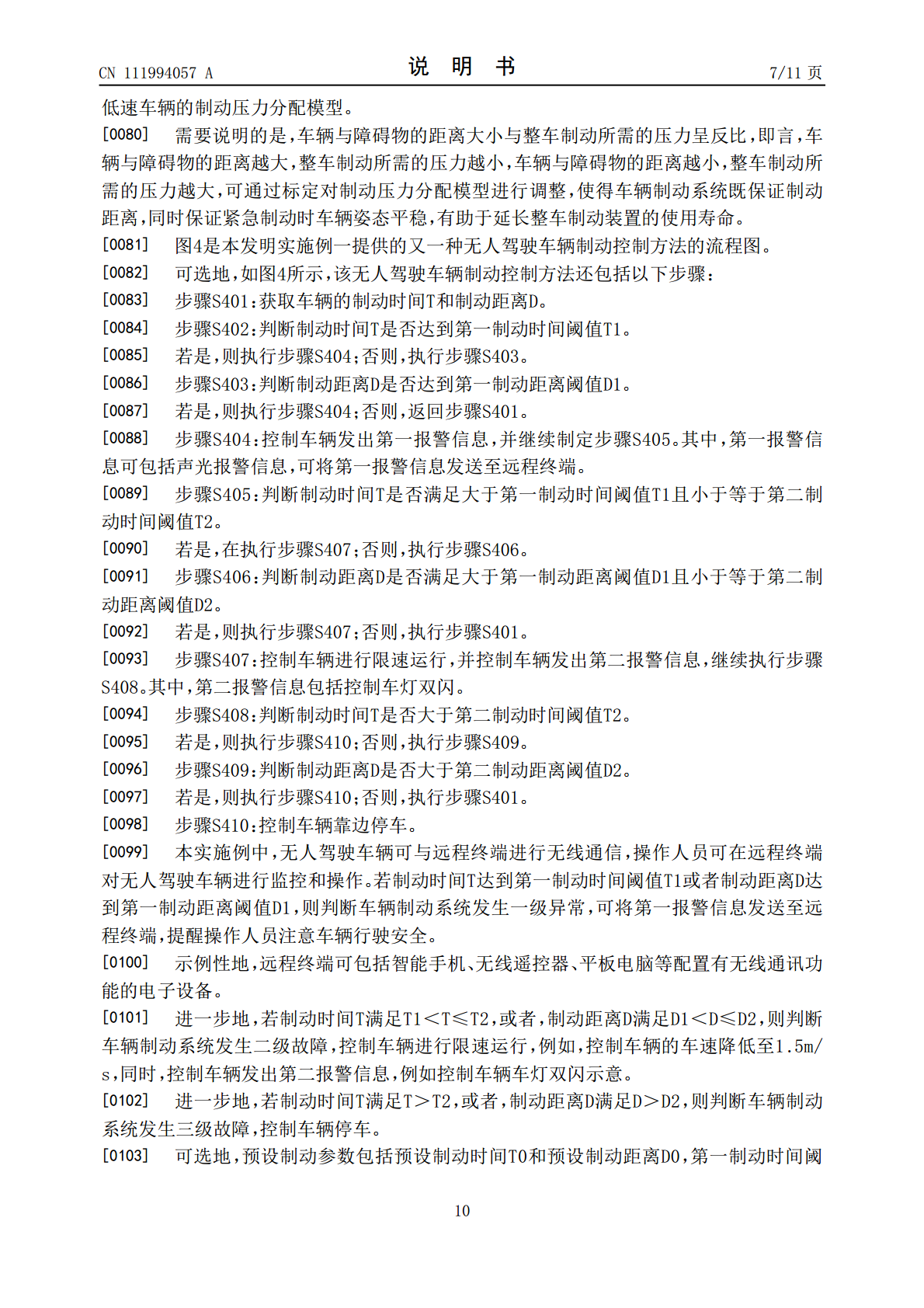
本发明公开了一种无人驾驶车辆制动控制方法、控制系统及车辆,该制动控制方法包括以下步骤:获取车辆的车况路况信息;获取制动压力分配模型;根据车况路况信息及制动压力分配模型确定第一制动压力和第二制动压力;根据第一制动压力驱动前桥制动装置对前轮进行制动控制,并根据第二制动压力驱动后桥制动装置对后轮进行制动控制。本发明实施例提供的制动控制方法可根据车况路况信息对前桥和后桥的制动压力分配进行定制化设置,解决了制动压力配置不合理的问题,避免制动产生的刹车点头及翻车事故,确保车身制动姿态平稳,有助于延长整车制动装置的使用
车辆制动控制系统、车辆和车辆制动控制系统的控制方法.pdf
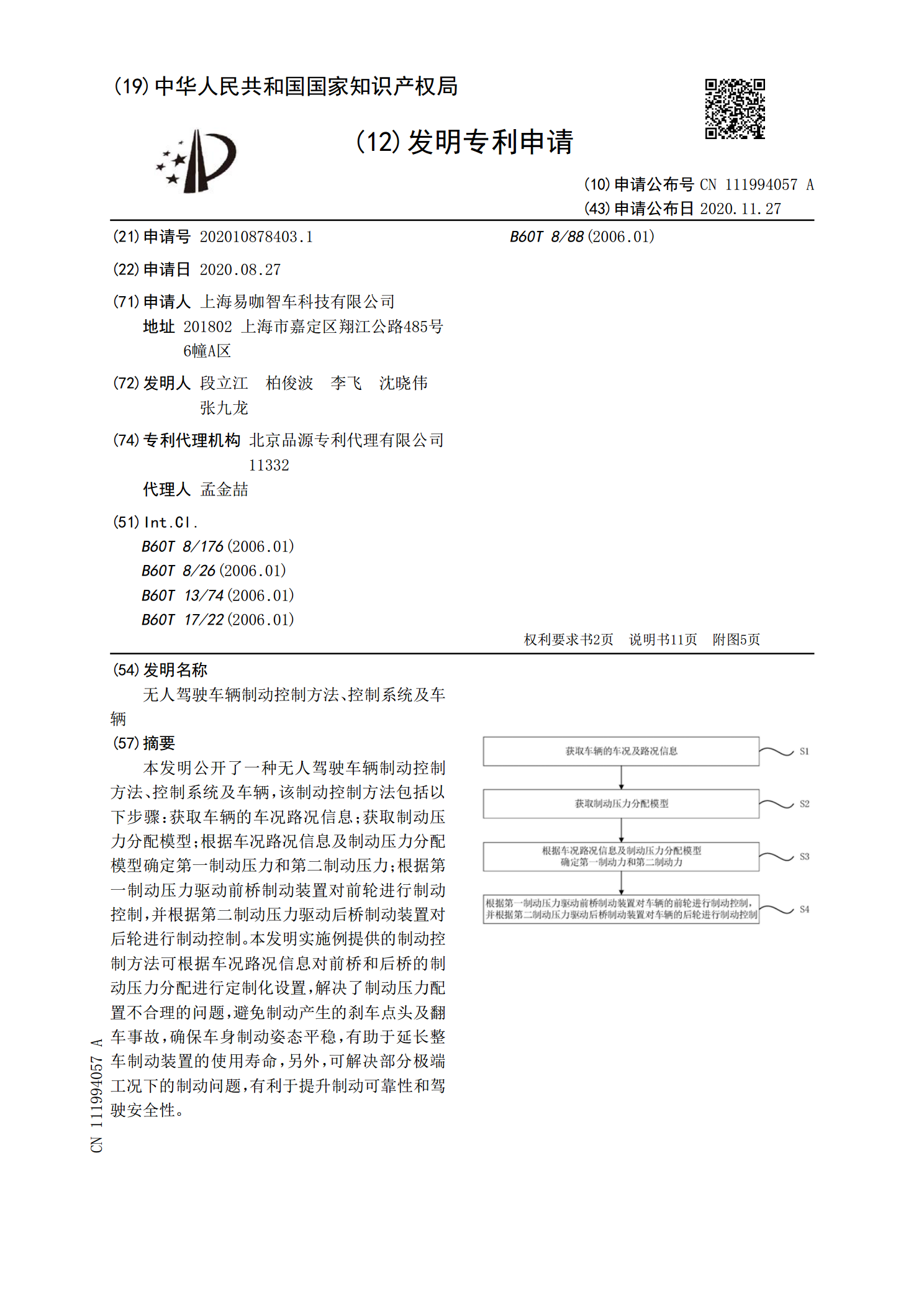
本发明提出了车辆制动控制系统、车辆和车辆制动控制系统的控制方法。车辆制动控制系统包括:电机;涡流缓速器;输入装置;电池组件;控制装置;电机与涡流缓速器连接,电机和涡流缓速器分别与电池组件连接;控制装置与电机、涡流缓速器、电池组件以及输入装置相连接,控制装置用于获取电机的当前转速和电池组件的电量、根据输入装置的输入信号确定电机的目标转速、再根据电机的当前转速和电机的目标转速确定加速度、以及根据电池组件的电量和加速度控制电机和/或涡流缓速器进行制动。本发明提供的车辆制动控制系统,实现行车制动的柔性调节,并解决
一种无人驾驶车辆制动控制系统及方法.pdf
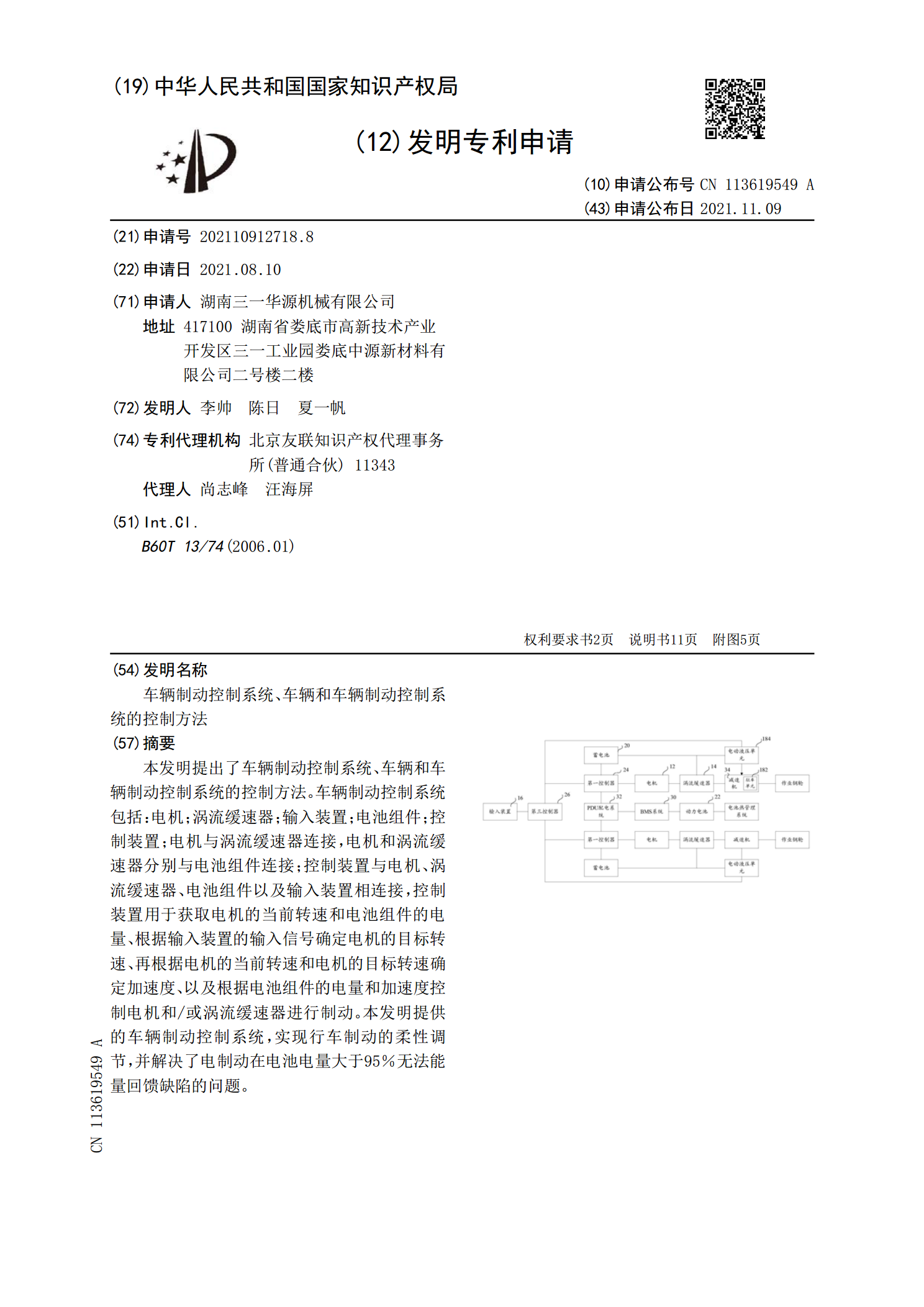
本发明提供一种无人驾驶车辆制动控制系统及方法,包括电动缸、制动管路系统、数据采集卡、控制器和决策层,以及用于检测车速的轮速传感器和用于检测制动管路系统制动压力的油压表,数据采集卡用于采集轮速传感器和油压表的数据,决策层将期望车速信号发送给控制器,控制器用来读取决策层传输的数据和数据采集卡的数据,通过采集当前车速和当前制动压力,与期望车速和期望制动压力进行对比,并控制电动缸的伸出与缩回,进而精确的实现制动力可控的制动效果。
车辆控制系统、车辆控制系统的控制方法及制动装置.pdf
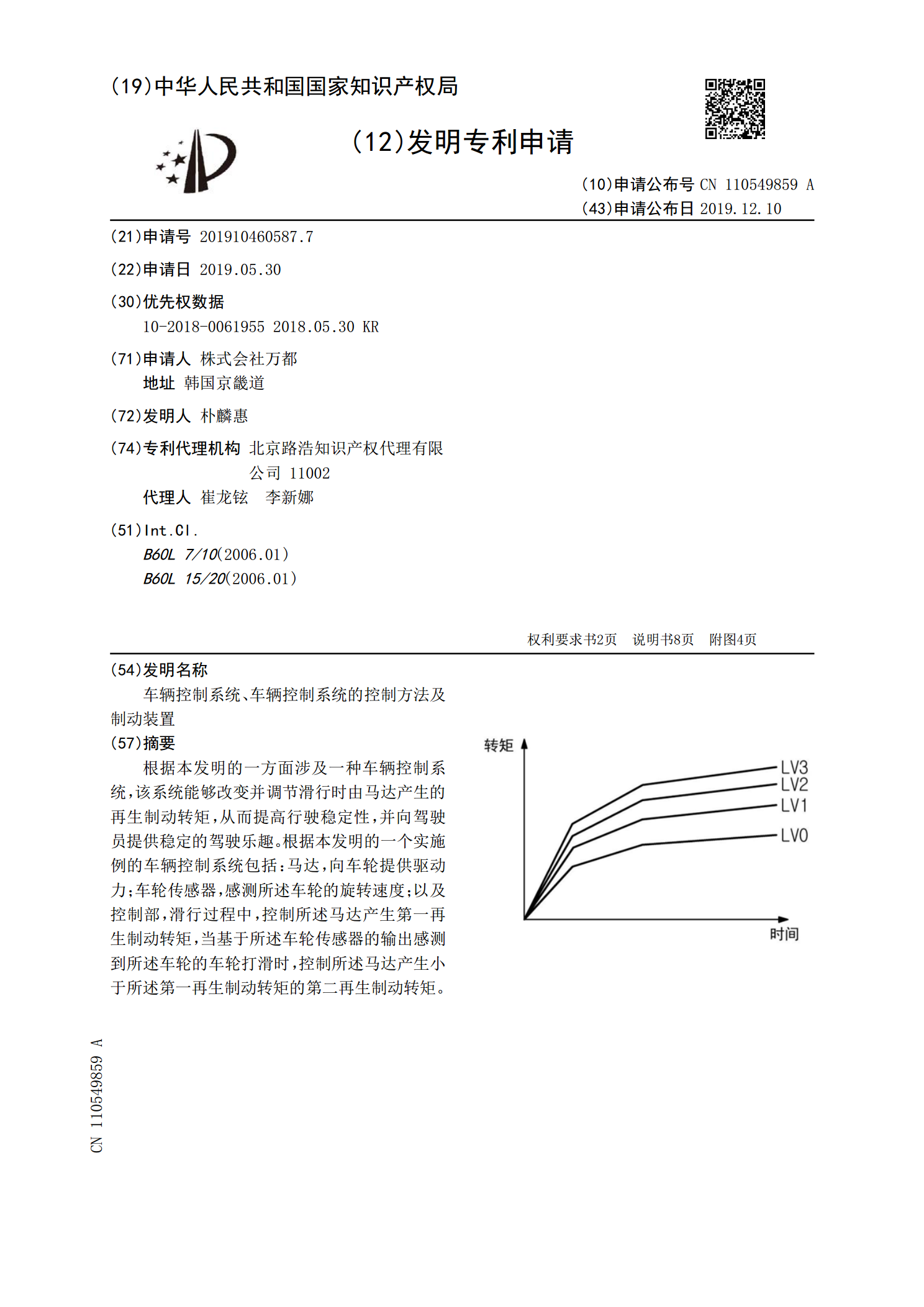
根据本发明的一方面涉及一种车辆控制系统,该系统能够改变并调节滑行时由马达产生的再生制动转矩,从而提高行驶稳定性,并向驾驶员提供稳定的驾驶乐趣。根据本发明的一个实施例的车辆控制系统包括:马达,向车轮提供驱动力;车轮传感器,感测所述车轮的旋转速度;以及控制部,滑行过程中,控制所述马达产生第一再生制动转矩,当基于所述车轮传感器的输出感测到所述车轮的车轮打滑时,控制所述马达产生小于所述第一再生制动转矩的第二再生制动转矩。
用于车辆的驻车制动控制系统、方法及车辆.pdf
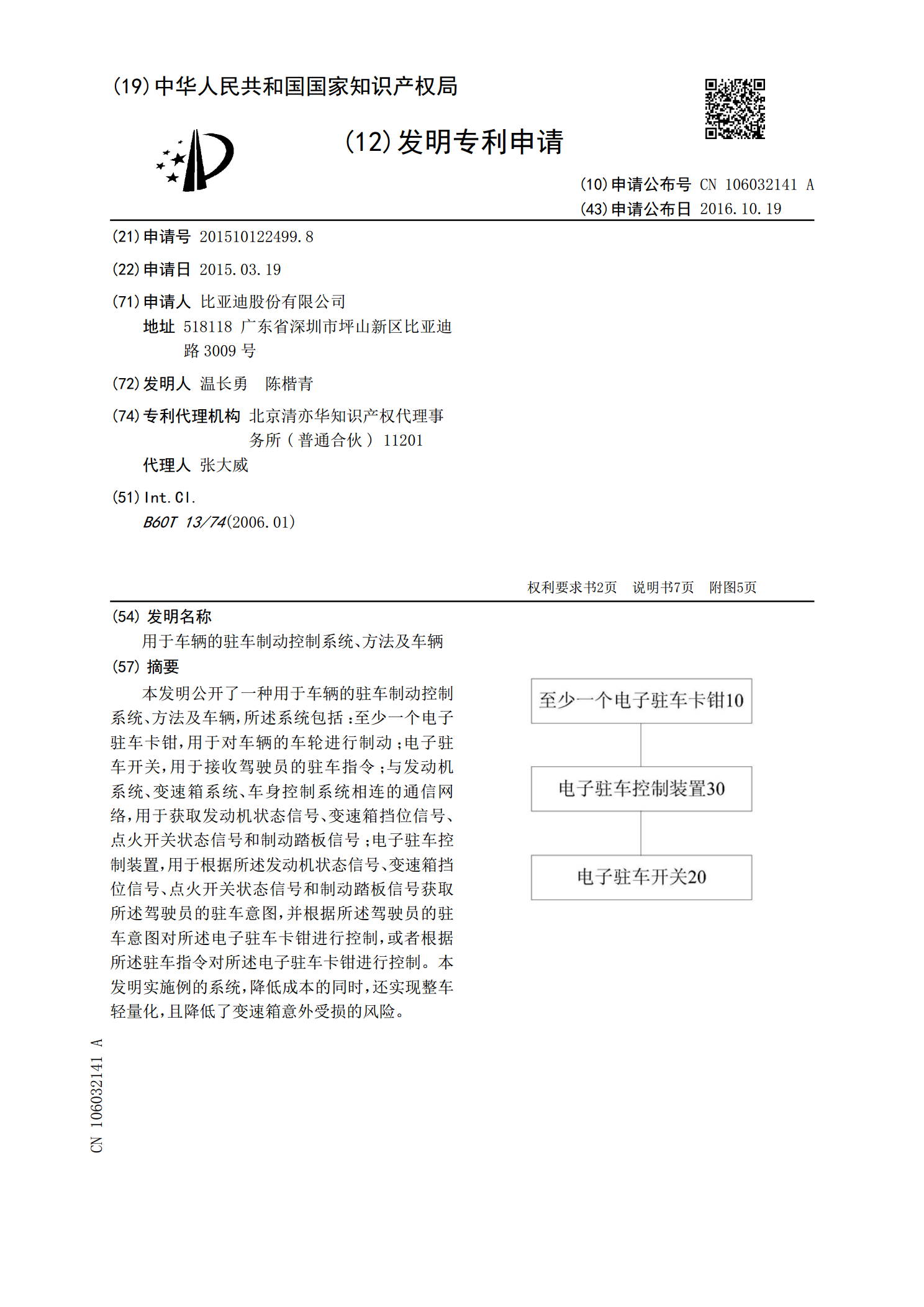
本发明公开了一种用于车辆的驻车制动控制系统、方法及车辆,所述系统包括:至少一个电子驻车卡钳,用于对车辆的车轮进行制动;电子驻车开关,用于接收驾驶员的驻车指令;与发动机系统、变速箱系统、车身控制系统相连的通信网络,用于获取发动机状态信号、变速箱挡位信号、点火开关状态信号和制动踏板信号;电子驻车控制装置,用于根据所述发动机状态信号、变速箱挡位信号、点火开关状态信号和制动踏板信号获取所述驾驶员的驻车意图,并根据所述驾驶员的驻车意图对所述电子驻车卡钳进行控制,或者根据所述驻车指令对所述电子驻车卡钳进行控制。本发明