
一种无人驾驶车辆制动控制系统及方法.pdf

fa****楠吖

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无人驾驶车辆制动控制系统及方法.pdf
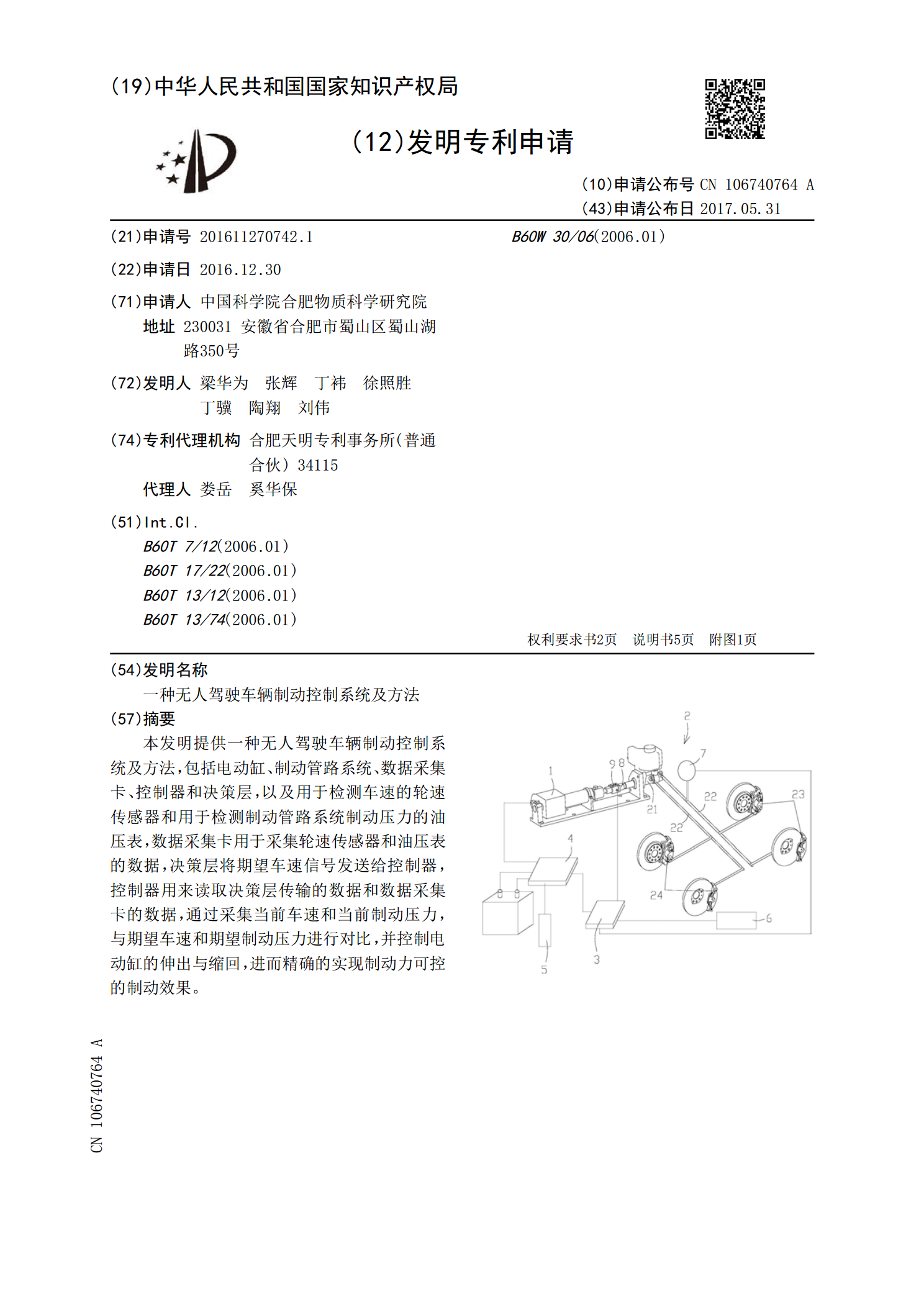
本发明提供一种无人驾驶车辆制动控制系统及方法,包括电动缸、制动管路系统、数据采集卡、控制器和决策层,以及用于检测车速的轮速传感器和用于检测制动管路系统制动压力的油压表,数据采集卡用于采集轮速传感器和油压表的数据,决策层将期望车速信号发送给控制器,控制器用来读取决策层传输的数据和数据采集卡的数据,通过采集当前车速和当前制动压力,与期望车速和期望制动压力进行对比,并控制电动缸的伸出与缩回,进而精确的实现制动力可控的制动效果。
无人驾驶车辆制动控制方法、控制系统及车辆.pdf
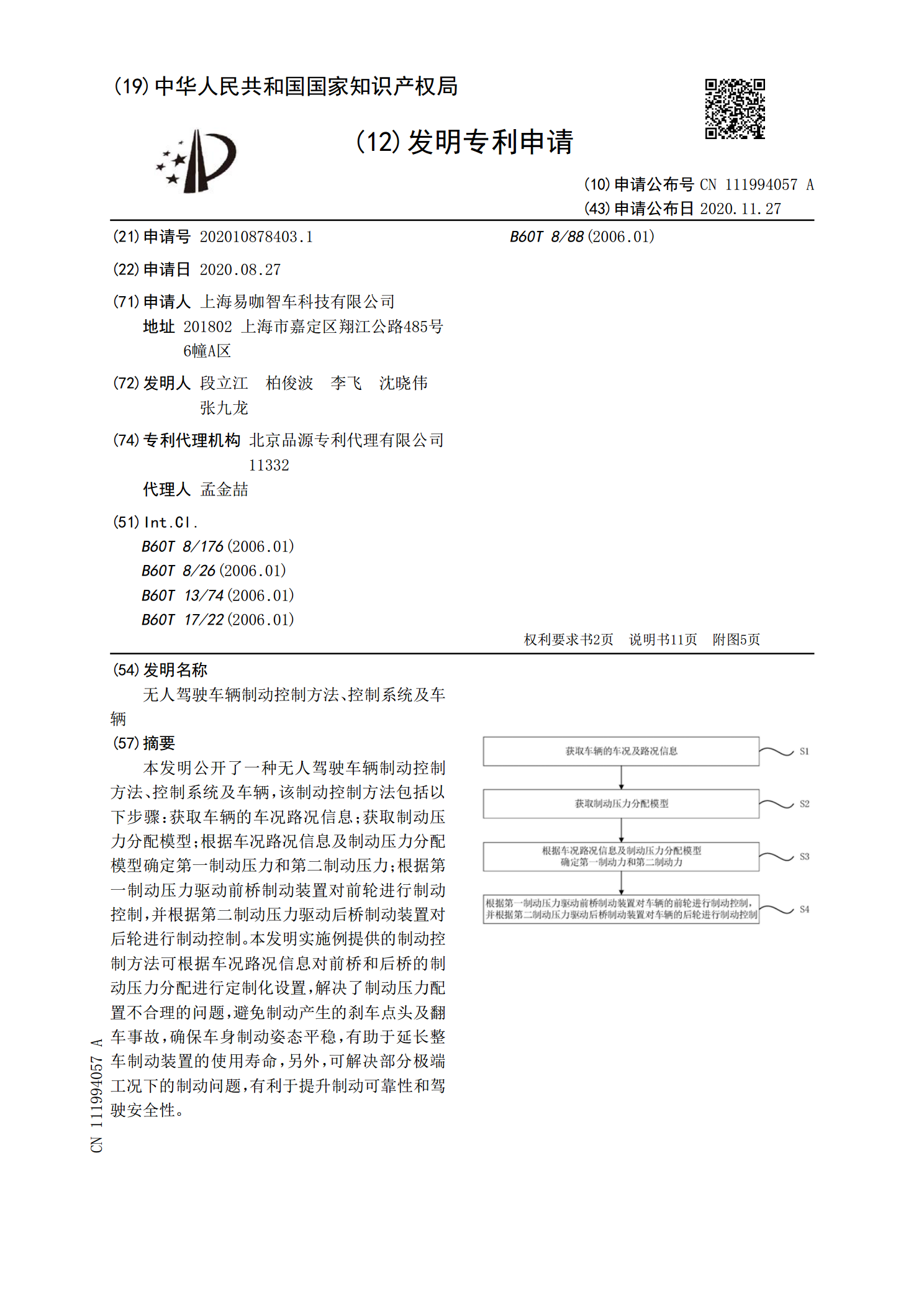
本发明公开了一种无人驾驶车辆制动控制方法、控制系统及车辆,该制动控制方法包括以下步骤:获取车辆的车况路况信息;获取制动压力分配模型;根据车况路况信息及制动压力分配模型确定第一制动压力和第二制动压力;根据第一制动压力驱动前桥制动装置对前轮进行制动控制,并根据第二制动压力驱动后桥制动装置对后轮进行制动控制。本发明实施例提供的制动控制方法可根据车况路况信息对前桥和后桥的制动压力分配进行定制化设置,解决了制动压力配置不合理的问题,避免制动产生的刹车点头及翻车事故,确保车身制动姿态平稳,有助于延长整车制动装置的使用
一种用于无人驾驶车辆的制动控制方法.pdf
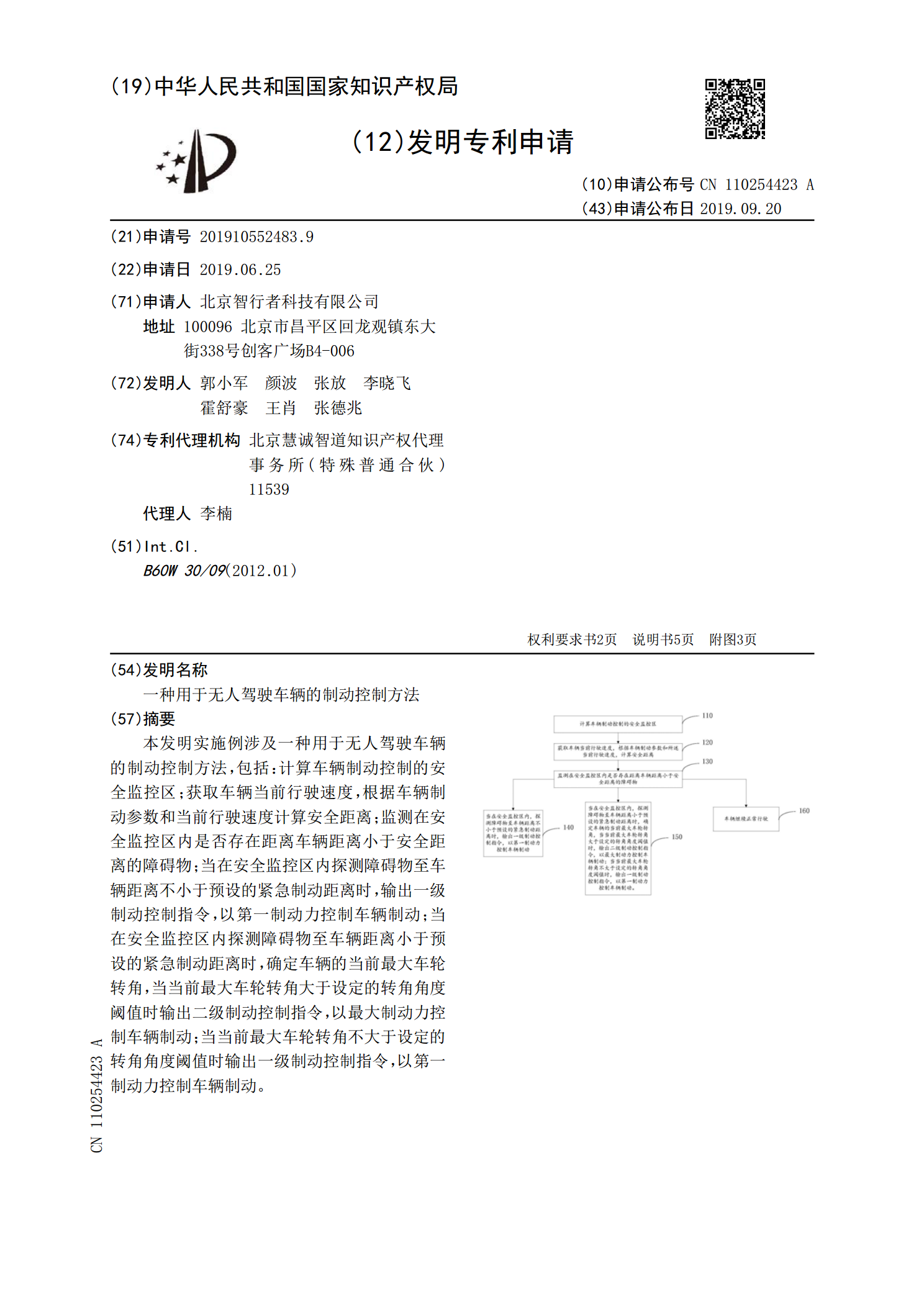
本发明实施例涉及一种用于无人驾驶车辆的制动控制方法,包括:计算车辆制动控制的安全监控区;获取车辆当前行驶速度,根据车辆制动参数和当前行驶速度计算安全距离;监测在安全监控区内是否存在距离车辆距离小于安全距离的障碍物;当在安全监控区内探测障碍物至车辆距离不小于预设的紧急制动距离时,输出一级制动控制指令,以第一制动力控制车辆制动;当在安全监控区内探测障碍物至车辆距离小于预设的紧急制动距离时,确定车辆的当前最大车轮转角,当当前最大车轮转角大于设定的转角角度阈值时输出二级制动控制指令,以最大制动力控制车辆制动;当当

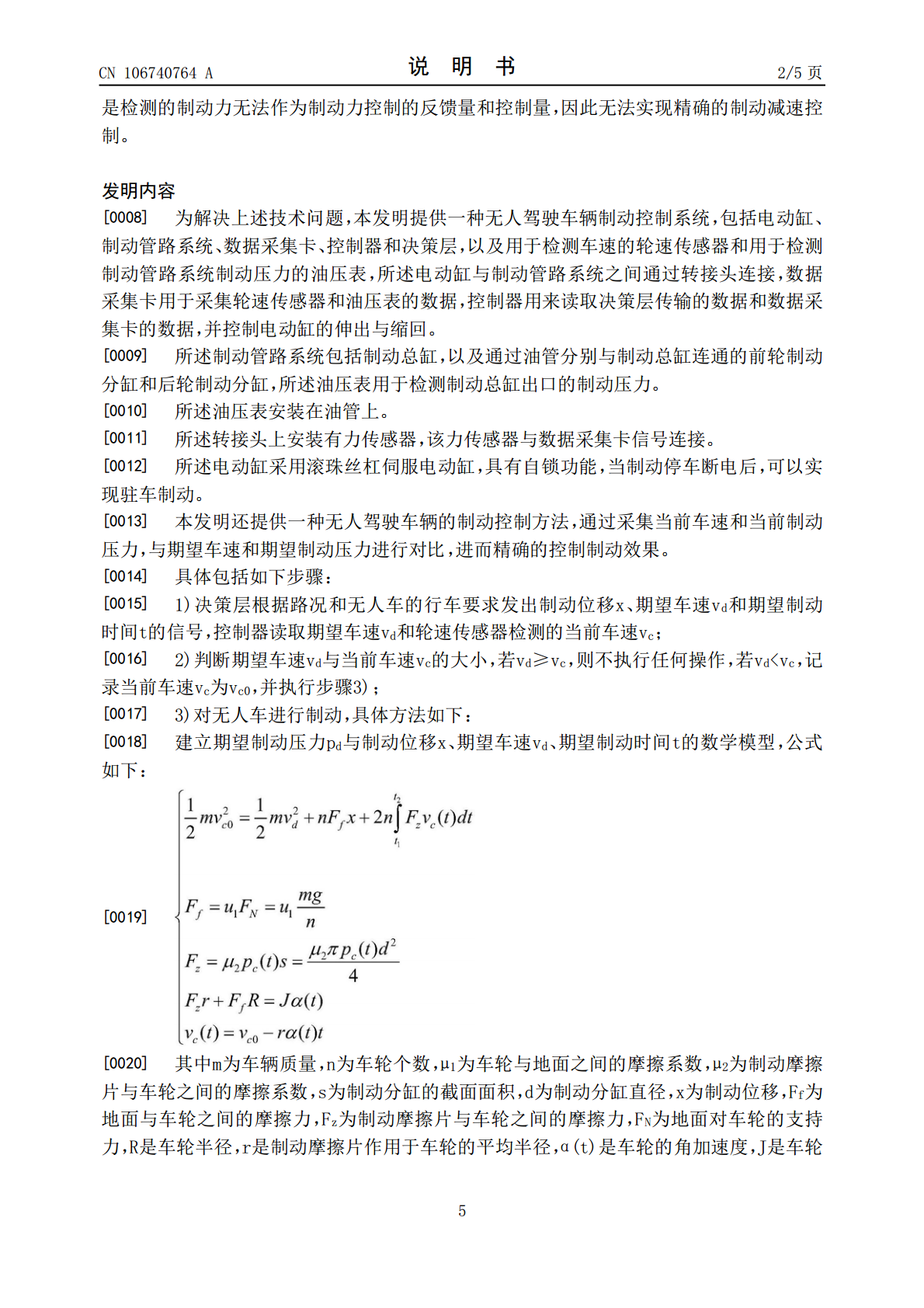
一种无人驾驶车辆制动装置.pdf
本发明公开一种无人驾驶车辆制动装置,行车制动驱动组件中的第一壳体上装有行车制动电机,行车制动电机的输出轴固定有第一蜗杆,第一蜗轮与第一蜗杆常啮合;齿条后部与齿轮常啮合,齿条前端部通过力传感器与制动油缸的活塞杆同轴固定;制动油缸两个出油端分别通过一根制动油管与对应的一个制动钳进油端相连;驻车制动驱动组件中的车驱动壳体内装有第二蜗杆、第二蜗轮和绕线器,第二蜗杆与驻车制动电机的输出轴同轴固定;第二蜗轮与第二蜗杆常啮合;绕线器上绕有两根驻车拉索,这两根驻车拉索分别与对应一个制动钳上的驻车拐臂相连,每根驻车拉索外活

一种无人驾驶车辆的制动装置.pdf
本发明涉及一种无人驾驶车辆的制动装置。该装置包括电机、减速器、编码器和传感机构;减速器为蜗轮蜗杆减速器,其输入端连接着电机,电机的后端输出轴上连接着编码器;减速器输出轴的一端连接着传感器触头,其另一端连接着扭矩传感器,扭矩传感器的另一端连接着绕设有钢线的线轮;连接减速器壳体的传感器固定架上部两侧分别设有零位传感器和极位传感器,两传感器的触头分别位于传感器触头的圆形运动轨迹内侧。本发明采用蜗轮蜗杆机构能有效的使车辆保持处于制动状态;限位传感器和扭矩限制器实现有效制动以及保证车辆的安全;钢线保证了无人驾驶模式