
用于控制自动驾驶车辆的转向控制权的切换的方法.pdf

哲妍****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于控制自动驾驶车辆的转向控制权的切换的方法.pdf
本发明涉及用于控制自动驾驶车辆的转向控制权的切换的方法,所述方法可以包括:当请求将转向控制权从自动驾驶模式切换为手动驾驶模式时,执行使方向盘的转向角与车轮的转向角同步的控制;在同步过程中,当检测到方向盘被握住的手握状态时,检测方向盘的转向角与车轮的转向角之间的误差值;当误差值小于预设值时,执行将自动驾驶车辆的模式切换为手动驾驶模式的控制。

用于车辆转向控制的方法.pdf
一种用于车辆转向控制的方法,用于当车辆在高速转弯期间经由加速度从转弯路径脱离时改善转向恢复。车辆转向控制方法包括:确定车辆是否在高速转弯状态下快速加速,以及当确定车辆在高速转弯状态下快速加速时,使用转向马达在车辆转向恢复方向上提供恢复补偿扭矩。具体地,基于车辆的转向扭矩、轮速、发动机的转数和转向角速度的关系确定恢复补偿扭矩。
用于车辆转向的控制的方法.pdf
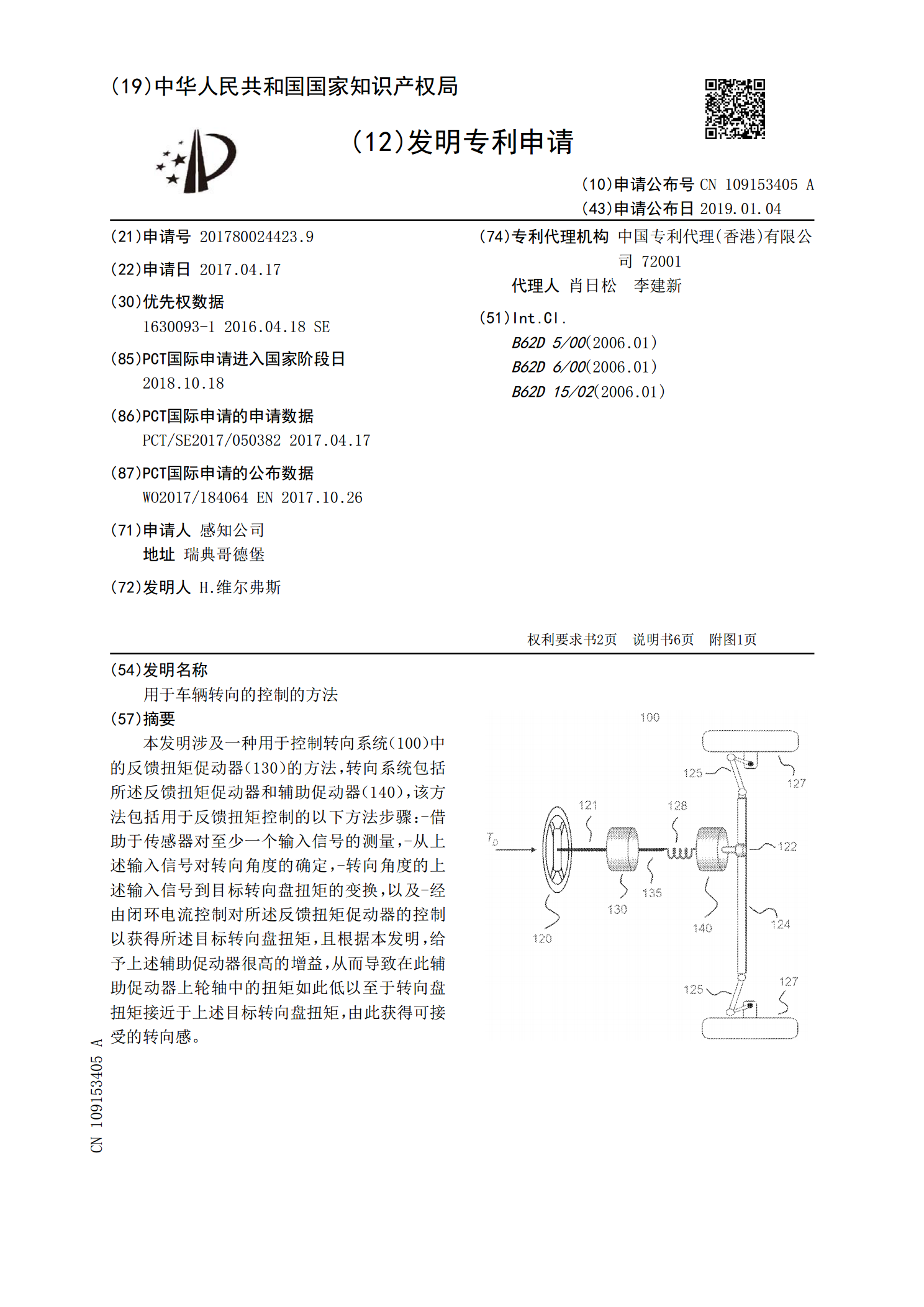
本发明涉及一种用于控制转向系统(100)中的反馈扭矩促动器(130)的方法,转向系统包括所述反馈扭矩促动器和辅助促动器(140),该方法包括用于反馈扭矩控制的以下方法步骤:‑借助于传感器对至少一个输入信号的测量,‑从上述输入信号对转向角度的确定,‑转向角度的上述输入信号到目标转向盘扭矩的变换,以及‑经由闭环电流控制对所述反馈扭矩促动器的控制以获得所述目标转向盘扭矩,且根据本发明,给予上述辅助促动器很高的增益,从而导致在此辅助促动器上轮轴中的扭矩如此低以至于转向盘扭矩接近于上述目标转向盘扭矩,由此获得可接受

自动驾驶车辆和用于自动驾驶车辆的控制方法.pdf
本发明提供了一种自动驾驶车辆和一种用于自动驾驶车辆的控制方法。该自动驾驶车辆包括用户检测监测装置和起动控制装置。用户检测监测装置在自动驾驶车辆停在目的地之后检测离开自动驾驶车辆的用户作为下车用户并且监测下车用户。起动控制装置在检测到下车用户之后、满足起动条件之前保持自动驾驶车辆的停止状态,并且在满足起动条件的情况下允许自动驾驶车辆的起动。所述起动条件是以下条件之一:指示下车用户至少移出自动驾驶车辆周围的移动判定区域的条件;和指示下车用户存在于移动判定区域中但在同一位置停留持续特定时长或更长时间的条件。

用于自动驾驶机动车辆的转向角度控制装置.pdf
本发明涉及一种用于控制机动车辆的转向角度的装置(1),该装置包括侧向控制器(14),该侧向控制器适合于向车辆转向系统(15)的至少一个致动器输出命令,该致动器通过该车辆方向盘的旋转角度作用于这些车辆导向车轮的转向角度,以在自动驾驶模式下遵循轨迹,该装置的特征在于,该装置进一步包括轨迹遵循分析模块(11),该轨迹遵循分析模块能够检测没有纵向坡度和没有侧向倾斜度的道路条件,并且当检测到这样的道路条件时,能够将当前车辆导向车轮转向角度误差值输出到自动方向盘角度偏差补偿模块(16),该自动方向盘角度偏差补偿模块链