
一种移动物的避障方法、装置、设备及产品.pdf

书生****瑞梦

1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种移动物的避障方法、装置、设备及产品.pdf
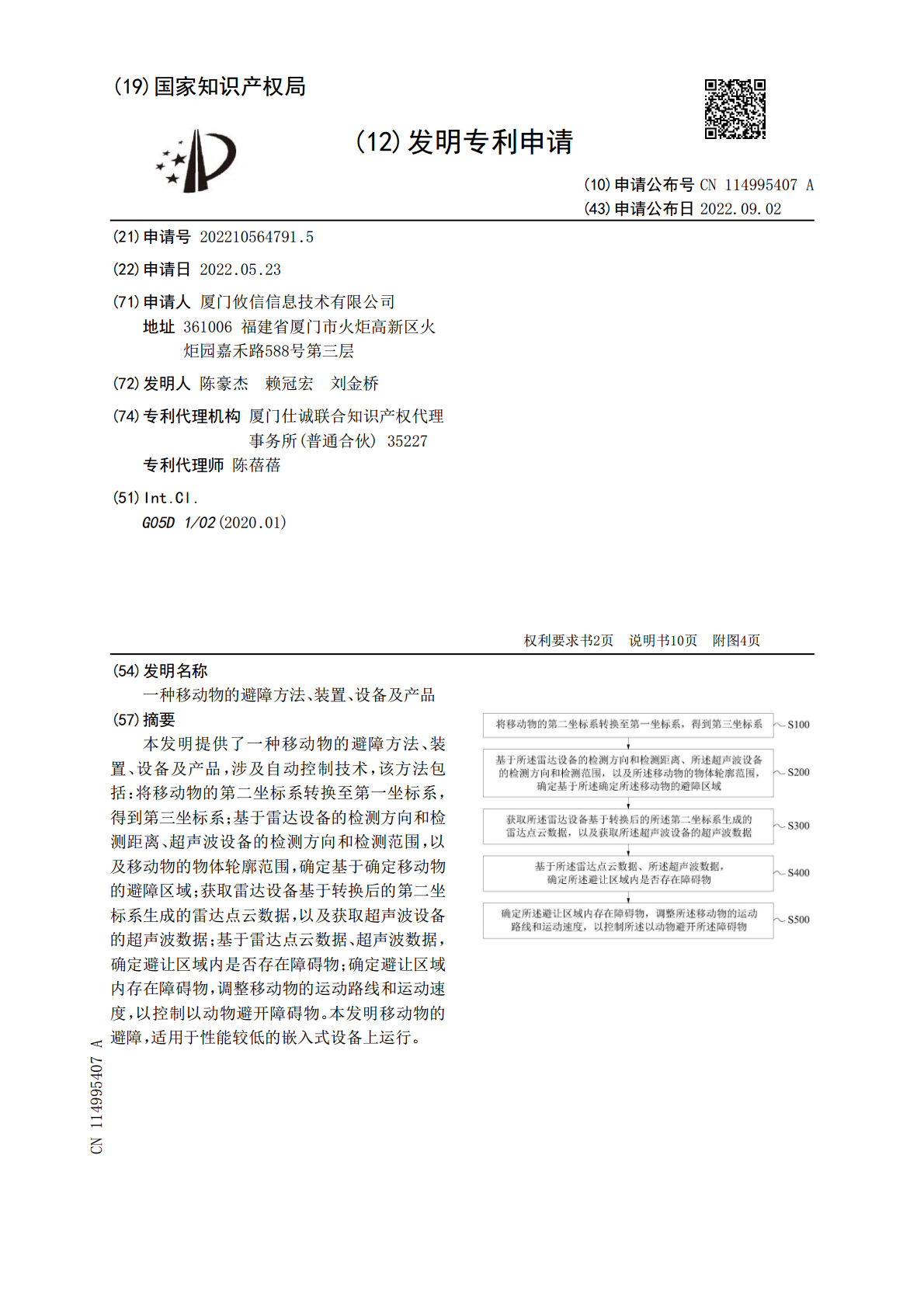
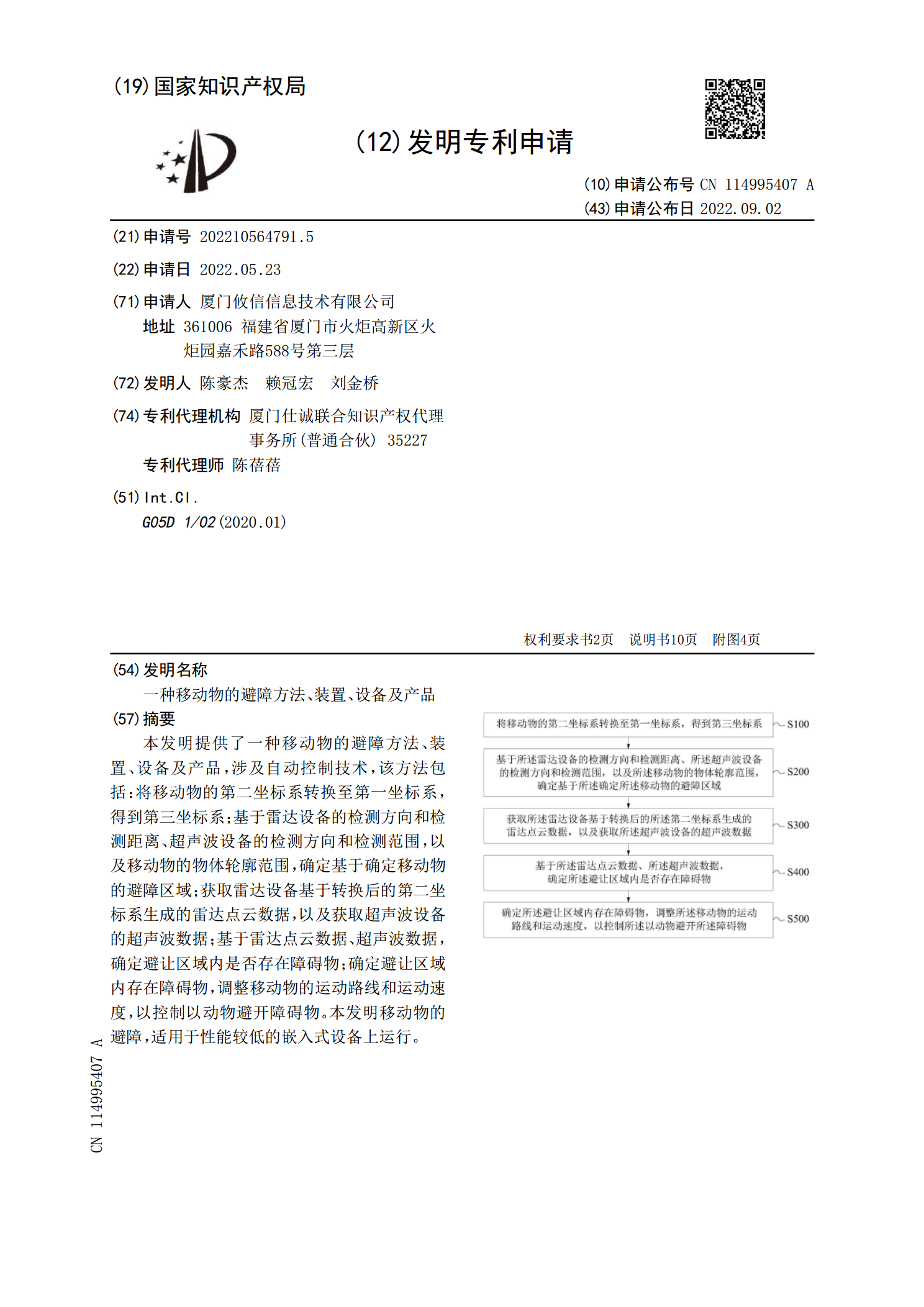
本发明提供了一种移动物的避障方法、装置、设备及产品,涉及自动控制技术,该方法包括:将移动物的第二坐标系转换至第一坐标系,得到第三坐标系;基于雷达设备的检测方向和检测距离、超声波设备的检测方向和检测范围,以及移动物的物体轮廓范围,确定基于确定移动物的避障区域;获取雷达设备基于转换后的第二坐标系生成的雷达点云数据,以及获取超声波设备的超声波数据;基于雷达点云数据、超声波数据,确定避让区域内是否存在障碍物;确定避让区域内存在障碍物,调整移动物的运动路线和运动速度,以控制以动物避开障碍物。本发明移动物的避障,适用
自移动设备的避障方法、装置以及避障设备.pdf
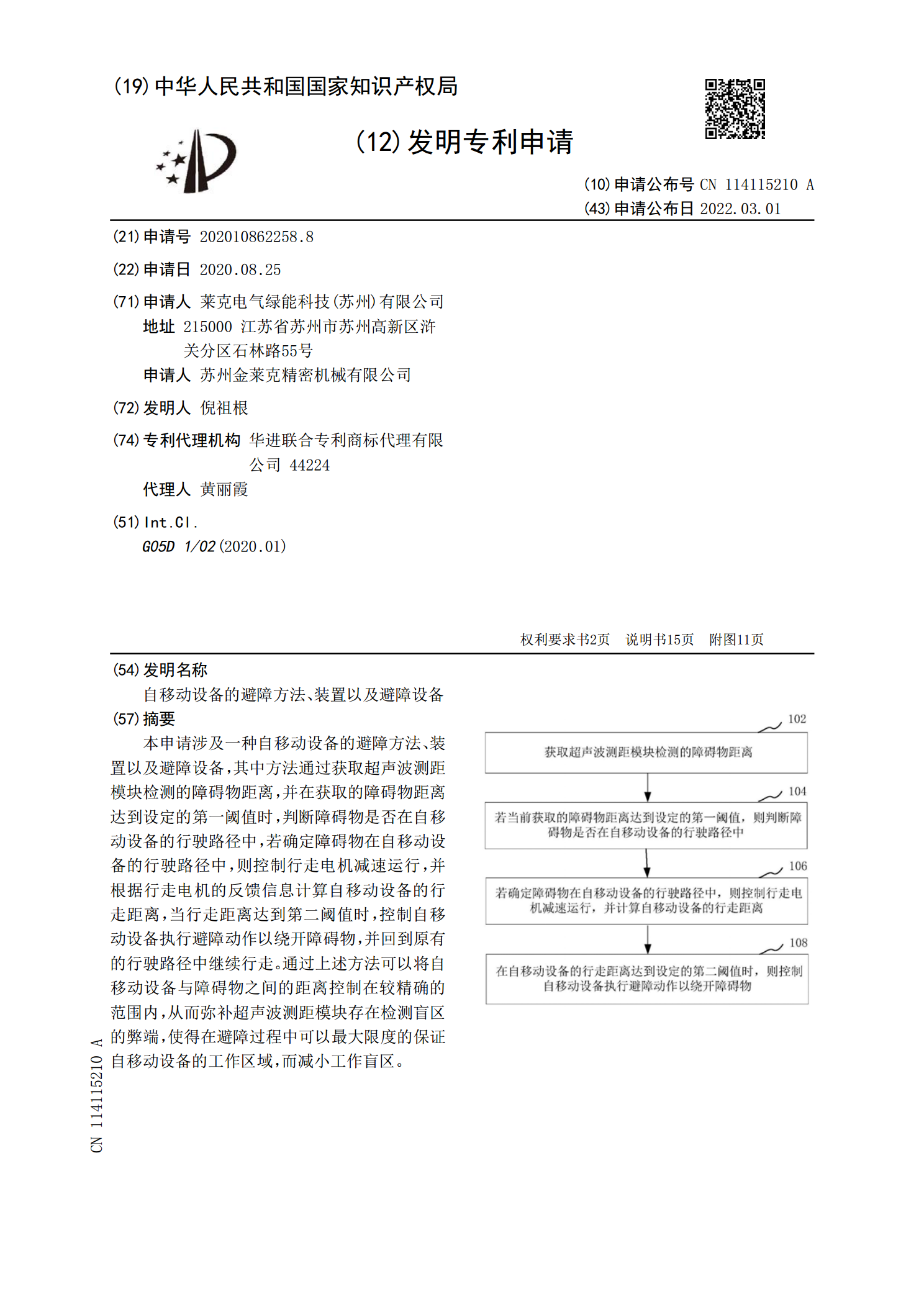
本申请涉及一种自移动设备的避障方法、装置以及避障设备,其中方法通过获取超声波测距模块检测的障碍物距离,并在获取的障碍物距离达到设定的第一阈值时,判断障碍物是否在自移动设备的行驶路径中,若确定障碍物在自移动设备的行驶路径中,则控制行走电机减速运行,并根据行走电机的反馈信息计算自移动设备的行走距离,当行走距离达到第二阈值时,控制自移动设备执行避障动作以绕开障碍物,并回到原有的行驶路径中继续行走。通过上述方法可以将自移动设备与障碍物之间的距离控制在较精确的范围内,从而弥补超声波测距模块存在检测盲区的弊端,使得在
一种盲人避障装置及其避障提示方法.pdf
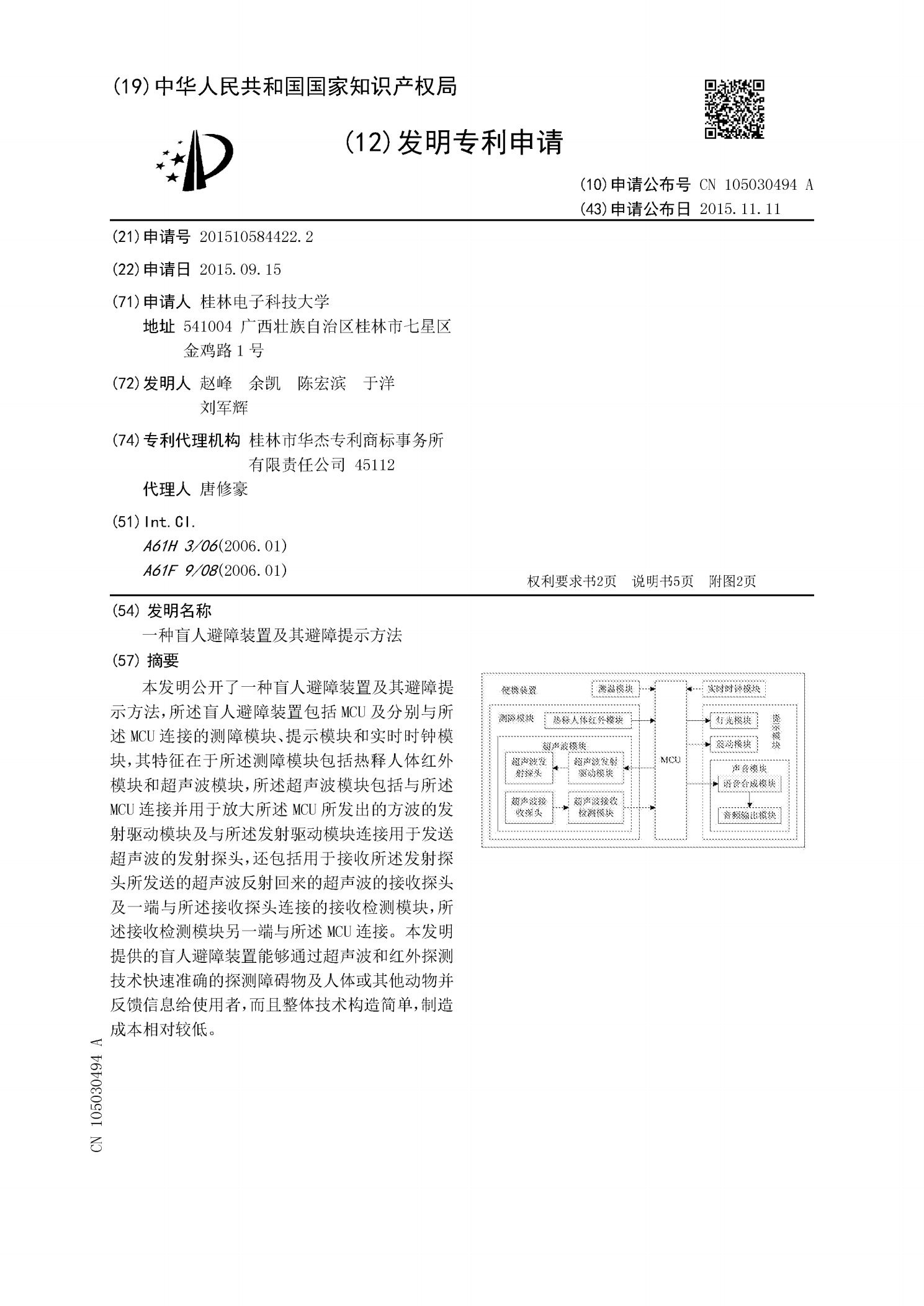
本发明公开了一种盲人避障装置及其避障提示方法,所述盲人避障装置包括MCU及分别与所述MCU连接的测障模块、提示模块和实时时钟模块,其特征在于所述测障模块包括热释人体红外模块和超声波模块,所述超声波模块包括与所述MCU连接并用于放大所述MCU所发出的方波的发射驱动模块及与所述发射驱动模块连接用于发送超声波的发射探头,还包括用于接收所述发射探头所发送的超声波反射回来的超声波的接收探头及一端与所述接收探头连接的接收检测模块,所述接收检测模块另一端与所述MCU连接。本发明提供的盲人避障装置能够通过超声波和红外探测
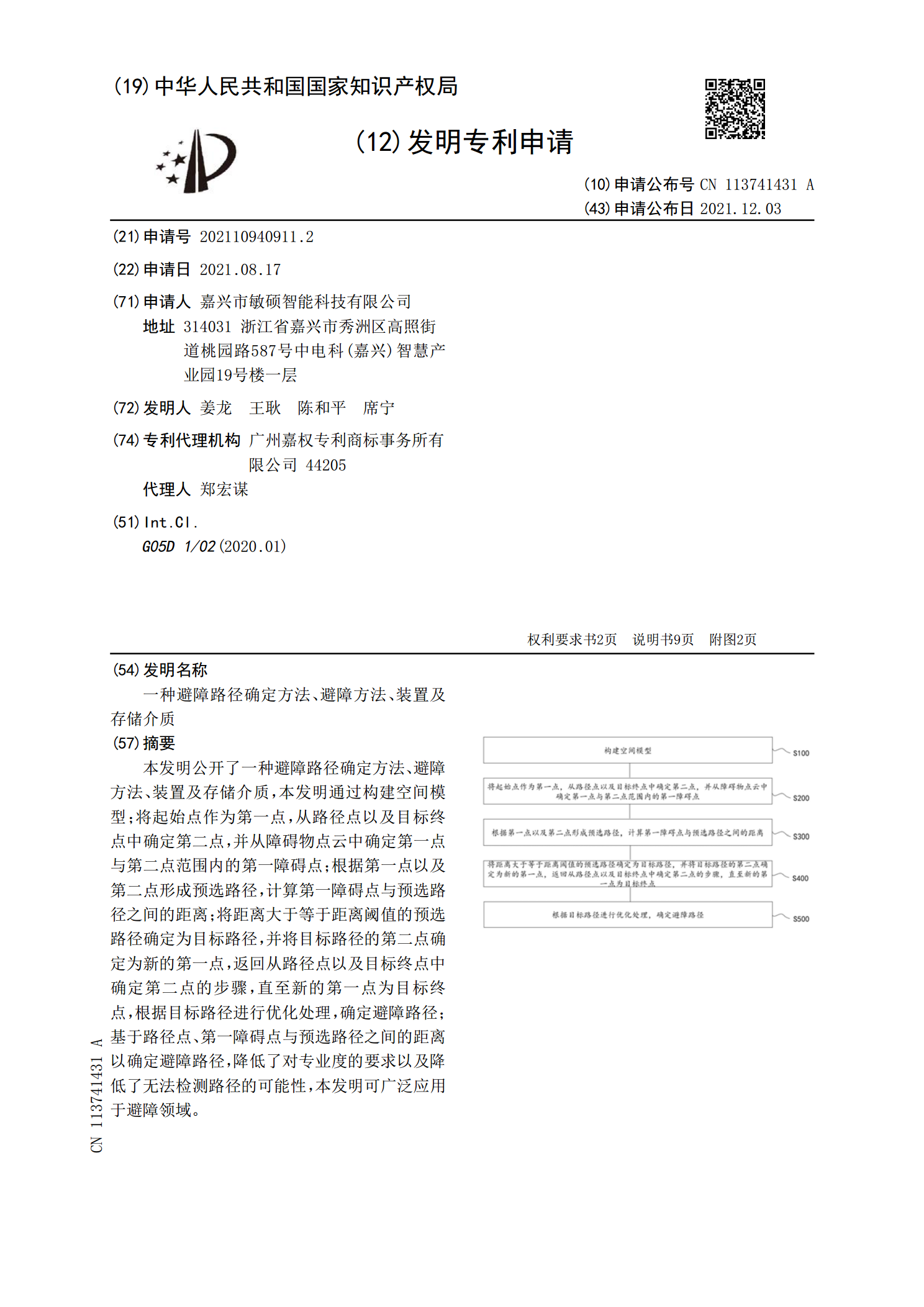
一种避障路径确定方法、避障方法、装置及存储介质.pdf
本发明公开了一种避障路径确定方法、避障方法、装置及存储介质,本发明通过构建空间模型;将起始点作为第一点,从路径点以及目标终点中确定第二点,并从障碍物点云中确定第一点与第二点范围内的第一障碍点;根据第一点以及第二点形成预选路径,计算第一障碍点与预选路径之间的距离;将距离大于等于距离阈值的预选路径确定为目标路径,并将目标路径的第二点确定为新的第一点,返回从路径点以及目标终点中确定第二点的步骤,直至新的第一点为目标终点,根据目标路径进行优化处理,确定避障路径;基于路径点、第一障碍点与预选路径之间的距离以确定避障
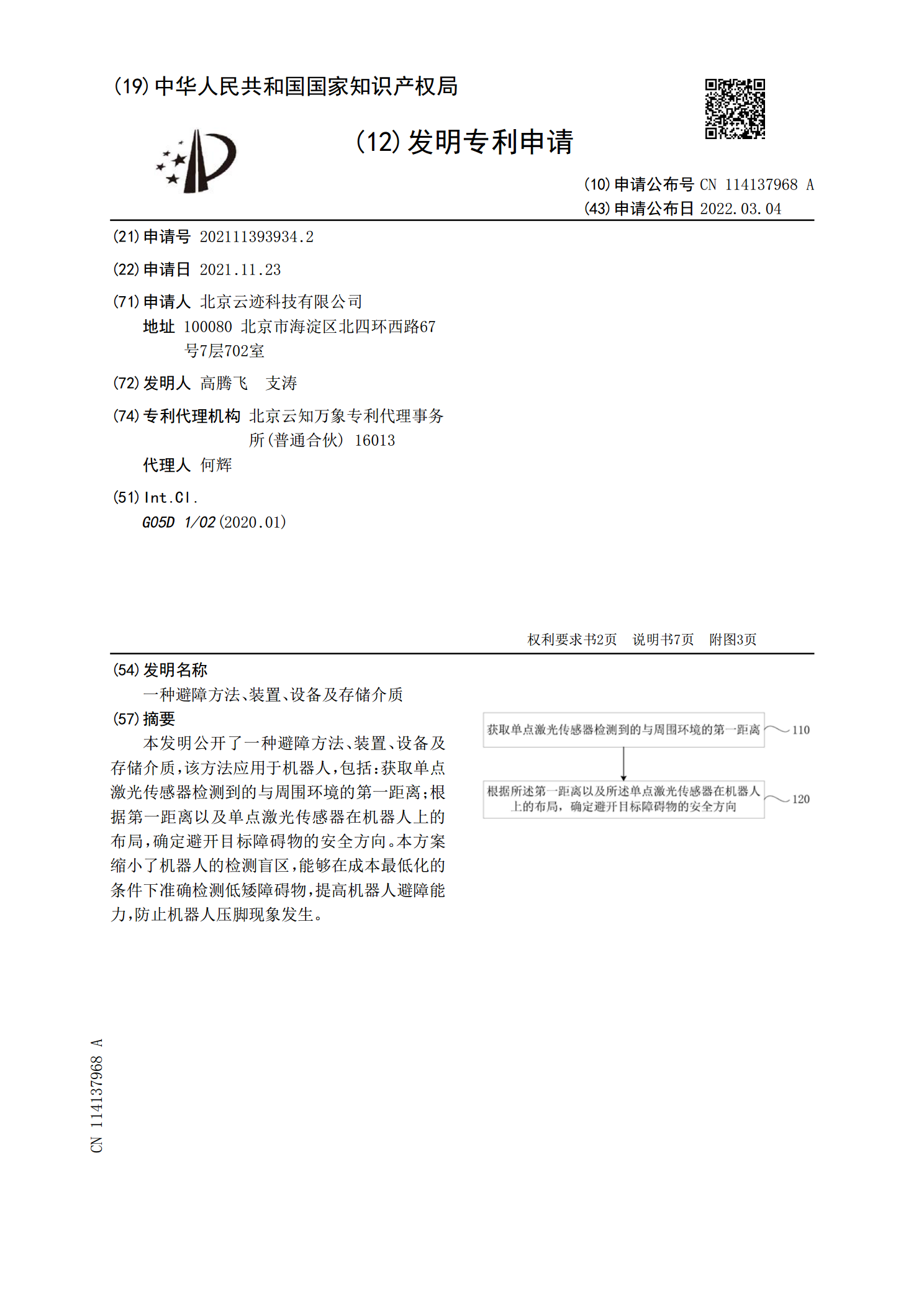
一种避障方法、装置、设备及存储介质.pdf
本发明公开了一种避障方法、装置、设备及存储介质,该方法应用于机器人,包括:获取单点激光传感器检测到的与周围环境的第一距离;根据第一距离以及单点激光传感器在机器人上的布局,确定避开目标障碍物的安全方向。本方案缩小了机器人的检测盲区,能够在成本最低化的条件下准确检测低矮障碍物,提高机器人避障能力,防止机器人压脚现象发生。