
一种避障方法、装置、设备及存储介质.pdf

小寄****淑k

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种避障方法、装置、设备及存储介质.pdf
本发明公开了一种避障方法、装置、设备及存储介质,该方法应用于机器人,包括:获取单点激光传感器检测到的与周围环境的第一距离;根据第一距离以及单点激光传感器在机器人上的布局,确定避开目标障碍物的安全方向。本方案缩小了机器人的检测盲区,能够在成本最低化的条件下准确检测低矮障碍物,提高机器人避障能力,防止机器人压脚现象发生。
一种避障路径确定方法、避障方法、装置及存储介质.pdf
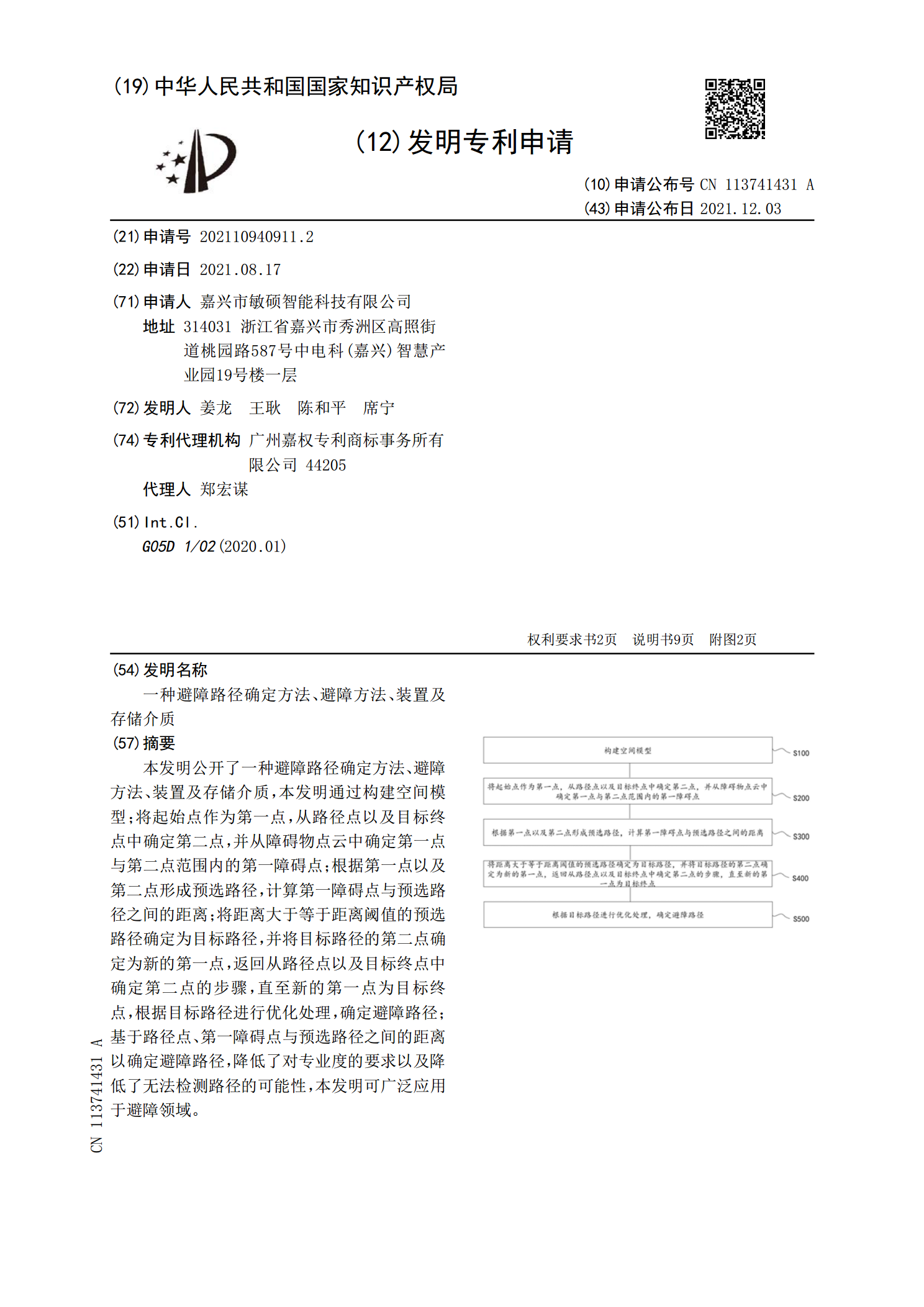
本发明公开了一种避障路径确定方法、避障方法、装置及存储介质,本发明通过构建空间模型;将起始点作为第一点,从路径点以及目标终点中确定第二点,并从障碍物点云中确定第一点与第二点范围内的第一障碍点;根据第一点以及第二点形成预选路径,计算第一障碍点与预选路径之间的距离;将距离大于等于距离阈值的预选路径确定为目标路径,并将目标路径的第二点确定为新的第一点,返回从路径点以及目标终点中确定第二点的步骤,直至新的第一点为目标终点,根据目标路径进行优化处理,确定避障路径;基于路径点、第一障碍点与预选路径之间的距离以确定避障
机器人避障方法、装置、设备及存储介质.pdf
本申请实施例公开了一种机器人避障方法、装置、设备及存储介质。其中,该方法包括:获取目标路段和所述机器人对应于所述目标路段的避障等级;控制所述机器人在所述目标路段行驶过程中根据所述避障等级进行避障。本申请实施例提高了机器人通行过程中针对通行环境进行避障的自适应能力,进而提高了机器人的工作效率。
一种自主避障路径规划方法、装置、设备及存储介质.pdf
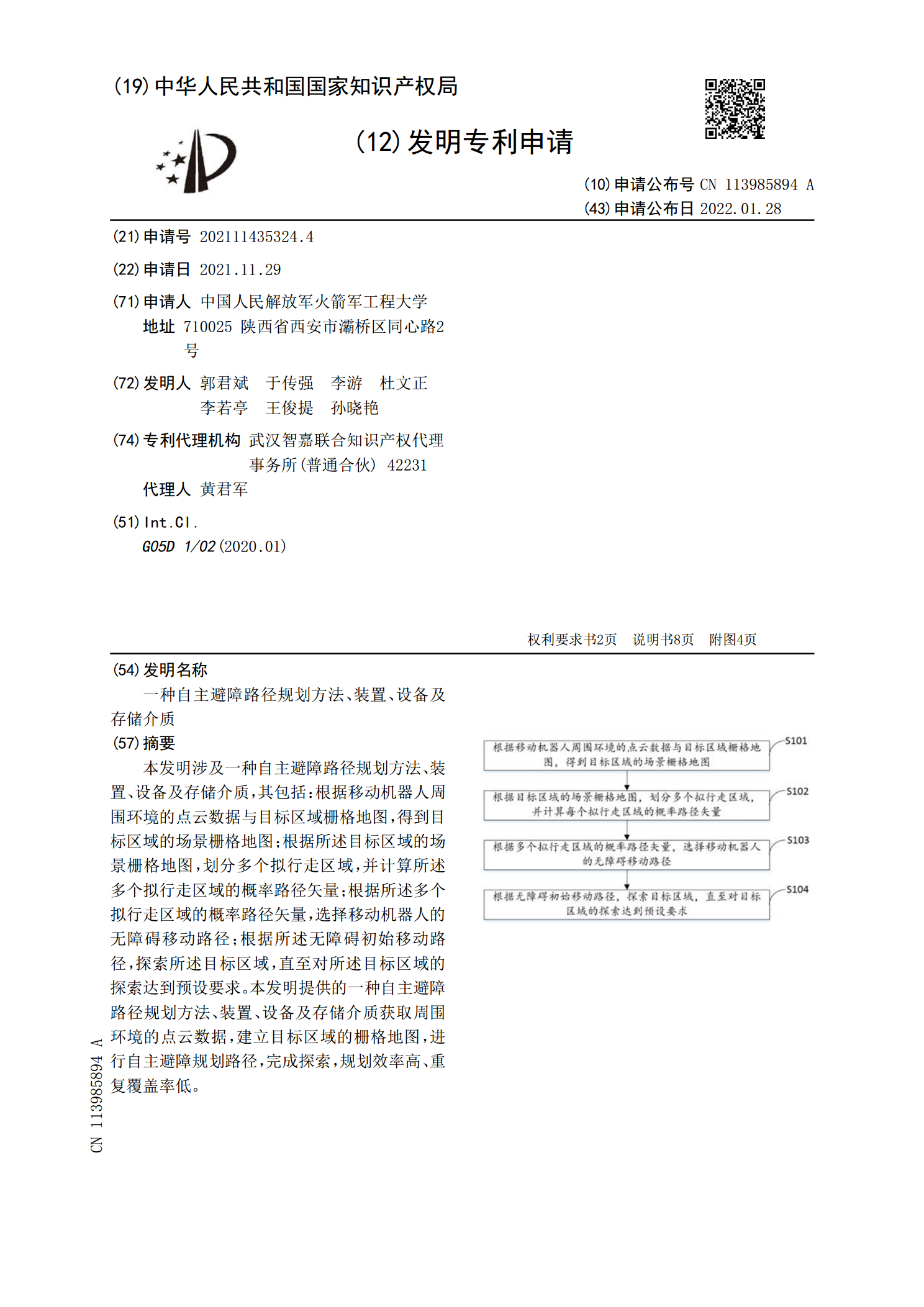
本发明涉及一种自主避障路径规划方法、装置、设备及存储介质,其包括:根据移动机器人周围环境的点云数据与目标区域栅格地图,得到目标区域的场景栅格地图;根据所述目标区域的场景栅格地图,划分多个拟行走区域,并计算所述多个拟行走区域的概率路径矢量;根据所述多个拟行走区域的概率路径矢量,选择移动机器人的无障碍移动路径;根据所述无障碍初始移动路径,探索所述目标区域,直至对所述目标区域的探索达到预设要求。本发明提供的一种自主避障路径规划方法、装置、设备及存储介质获取周围环境的点云数据,建立目标区域的栅格地图,进行自主避障
一种避障方法、装置、电子设备和存储介质.pdf
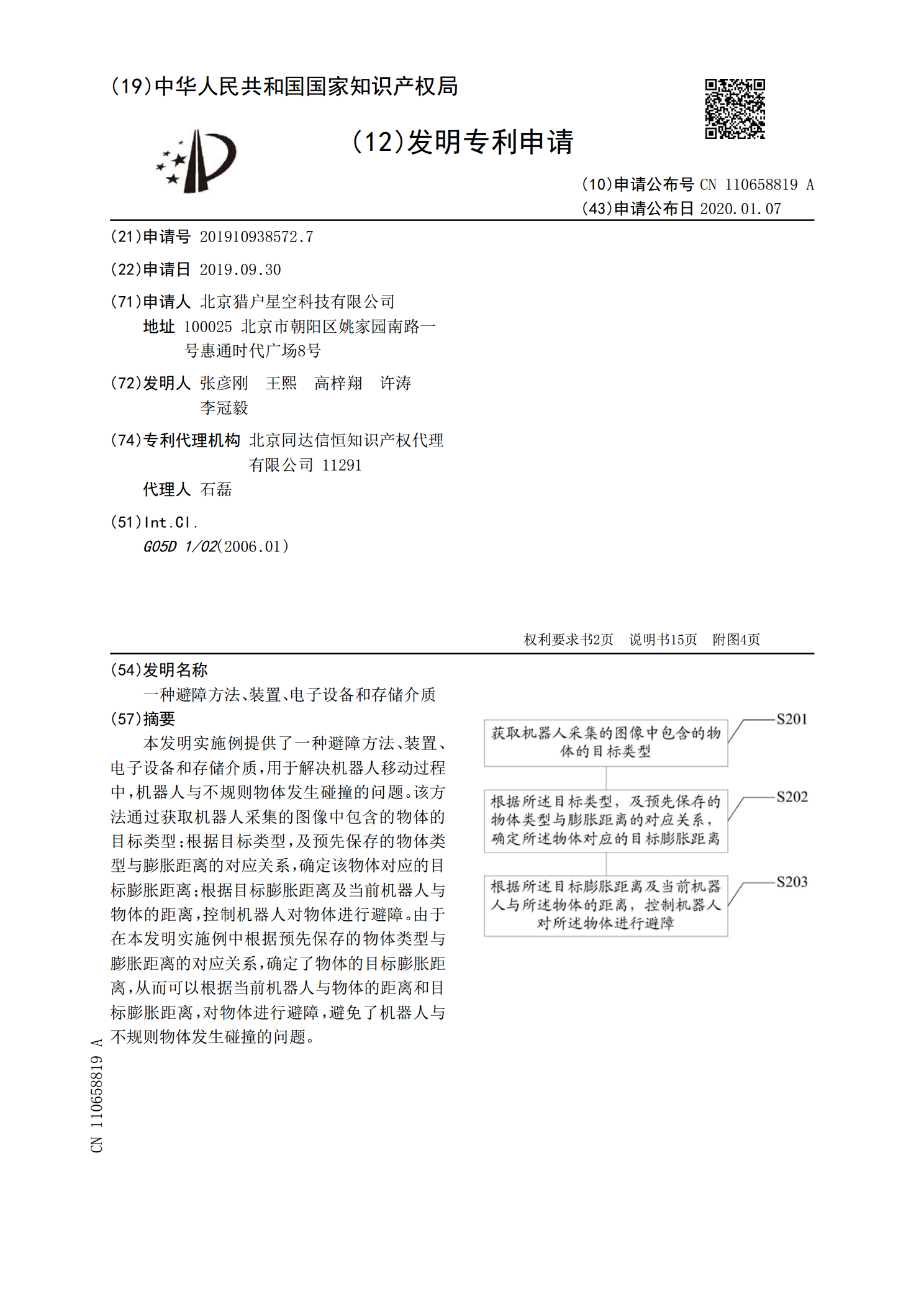
本发明实施例提供了一种避障方法、装置、电子设备和存储介质,用于解决机器人移动过程中,机器人与不规则物体发生碰撞的问题。该方法通过获取机器人采集的图像中包含的物体的目标类型;根据目标类型,及预先保存的物体类型与膨胀距离的对应关系,确定该物体对应的目标膨胀距离;根据目标膨胀距离及当前机器人与物体的距离,控制机器人对物体进行避障。由于在本发明实施例中根据预先保存的物体类型与膨胀距离的对应关系,确定了物体的目标膨胀距离,从而可以根据当前机器人与物体的距离和目标膨胀距离,对物体进行避障,避免了机器人与不规则物体发生