
爬壁机器人运动控制方法.pdf

建英****66

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
爬壁机器人运动控制方法.pdf
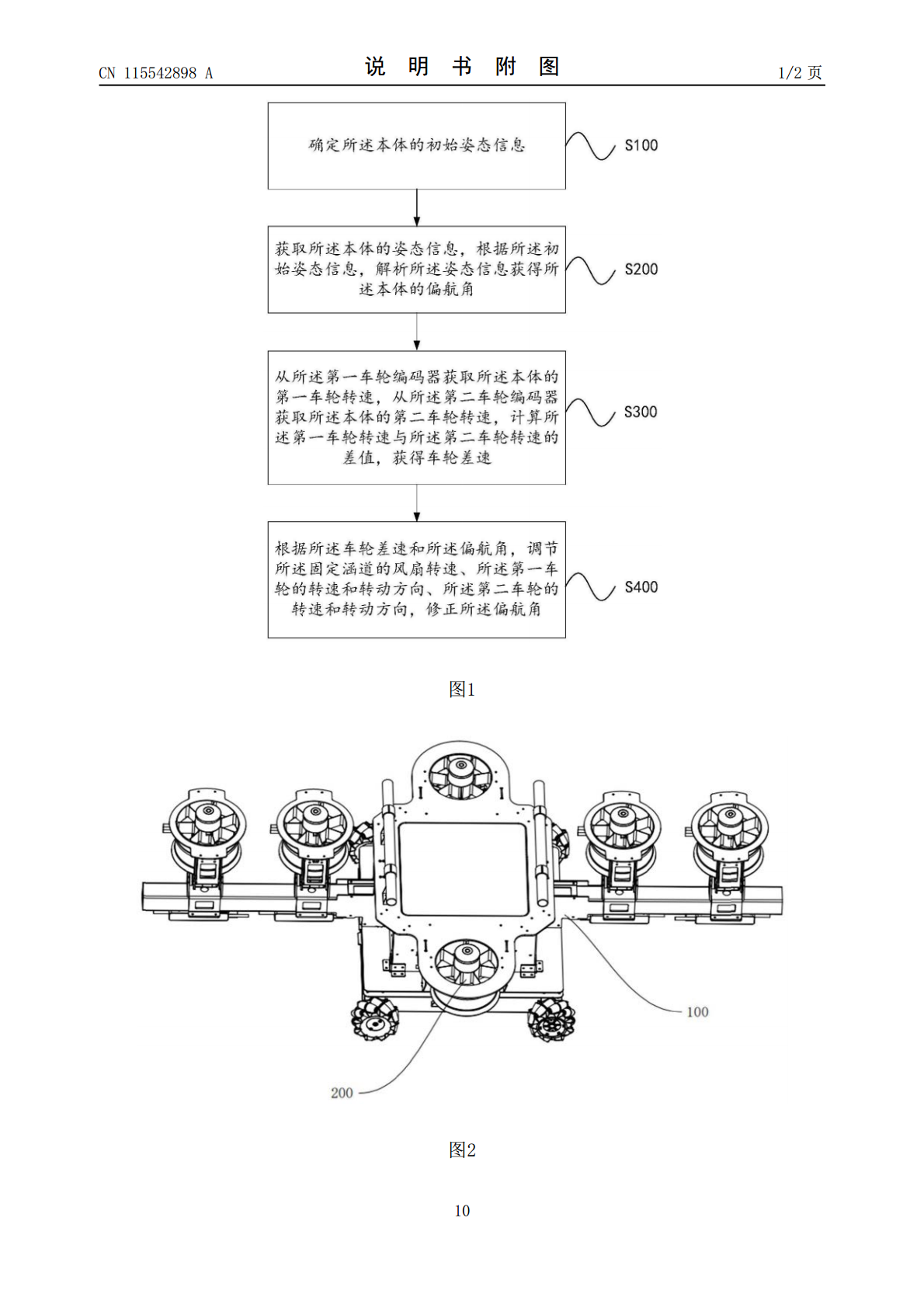
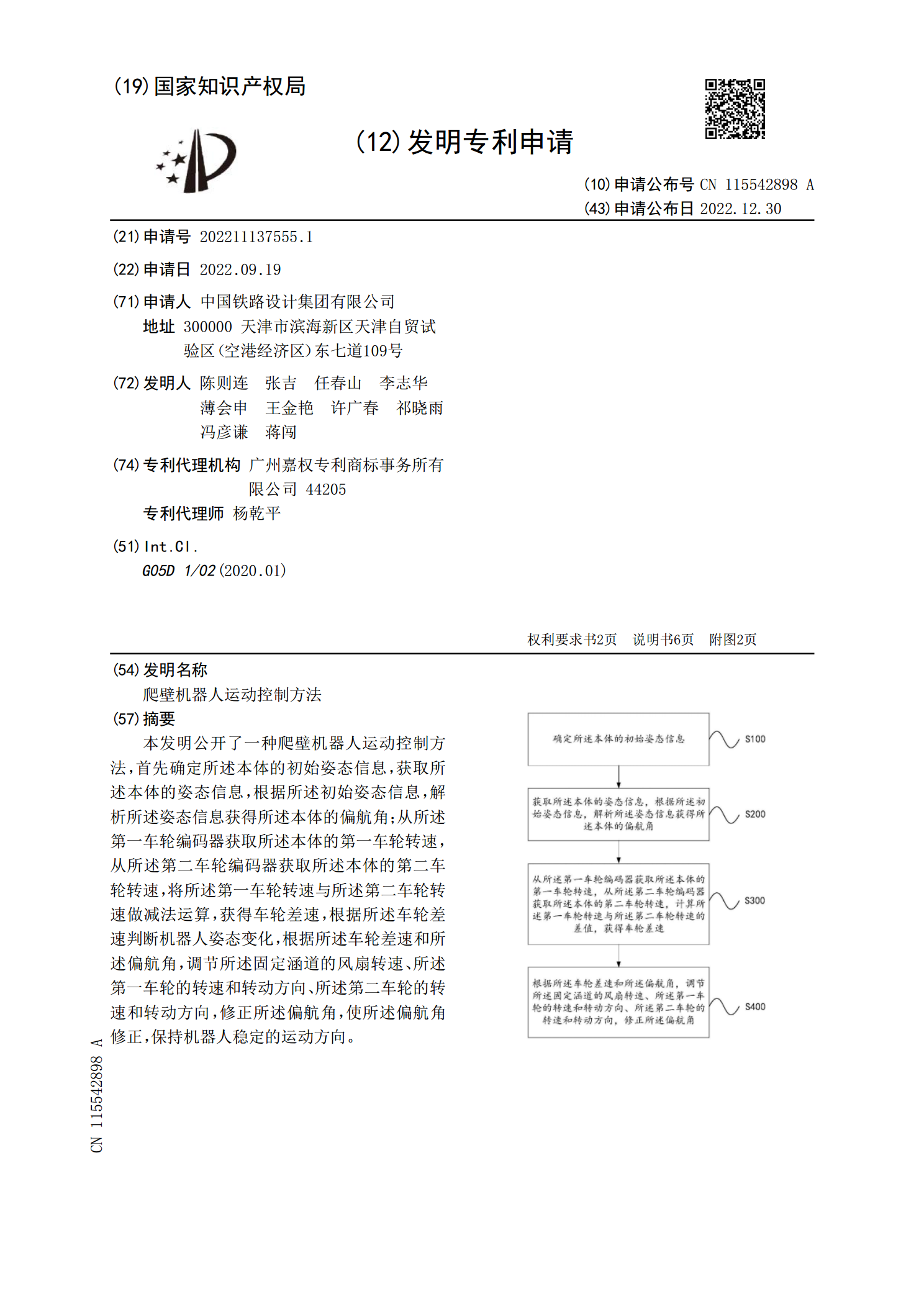
本发明公开了一种爬壁机器人运动控制方法,首先确定所述本体的初始姿态信息,获取所述本体的姿态信息,根据所述初始姿态信息,解析所述姿态信息获得所述本体的偏航角;从所述第一车轮编码器获取所述本体的第一车轮转速,从所述第二车轮编码器获取所述本体的第二车轮转速,将所述第一车轮转速与所述第二车轮转速做减法运算,获得车轮差速,根据所述车轮差速判断机器人姿态变化,根据所述车轮差速和所述偏航角,调节所述固定涵道的风扇转速、所述第一车轮的转速和转动方向、所述第二车轮的转速和转动方向,修正所述偏航角,使所述偏航角修正,保持机器
复合型爬壁机器人及其控制方法.pdf
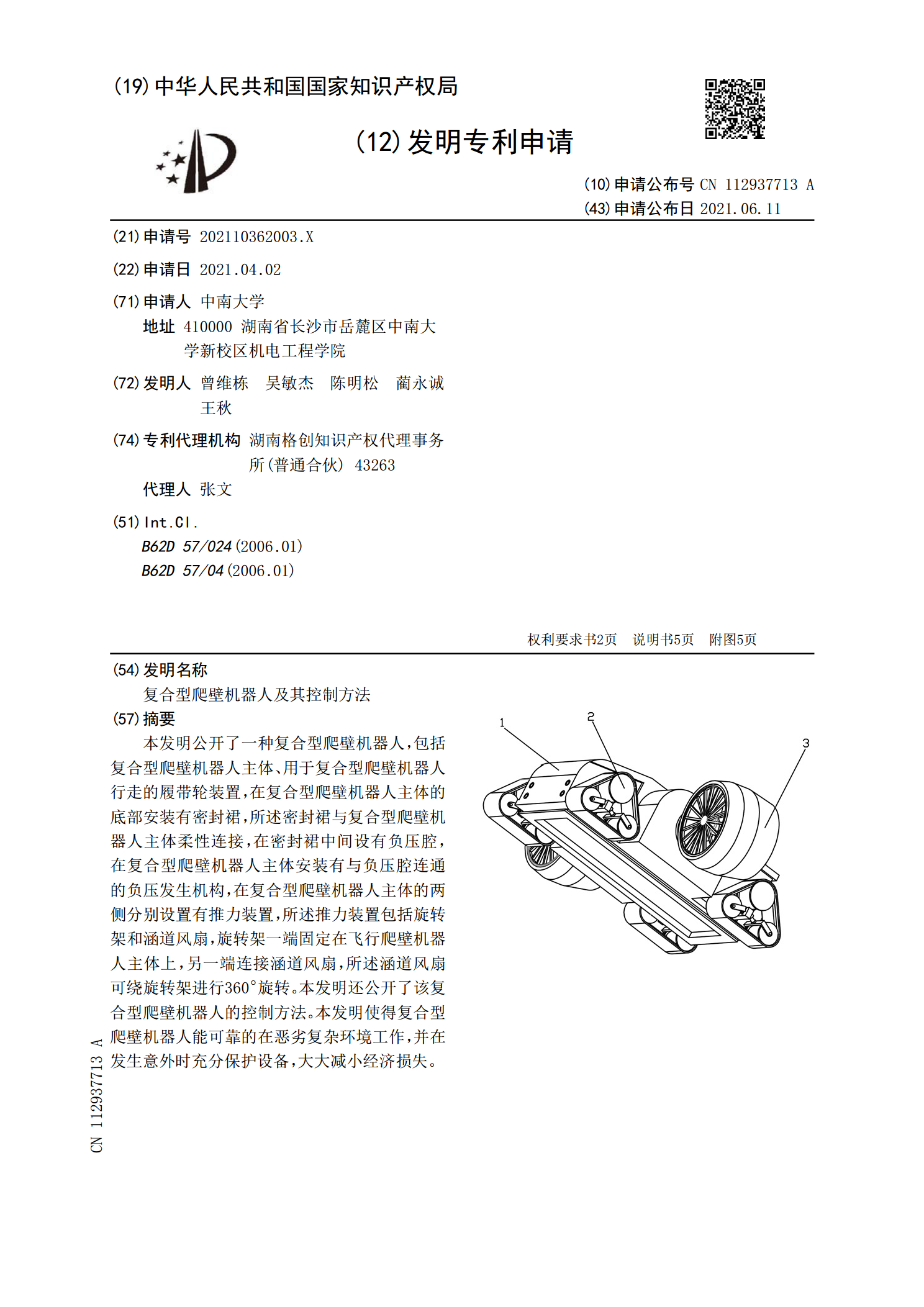
本发明公开了一种复合型爬壁机器人,包括复合型爬壁机器人主体、用于复合型爬壁机器人行走的履带轮装置,在复合型爬壁机器人主体的底部安装有密封裙,所述密封裙与复合型爬壁机器人主体柔性连接,在密封裙中间设有负压腔,在复合型爬壁机器人主体安装有与负压腔连通的负压发生机构,在复合型爬壁机器人主体的两侧分别设置有推力装置,所述推力装置包括旋转架和涵道风扇,旋转架一端固定在飞行爬壁机器人主体上,另一端连接涵道风扇,所述涵道风扇可绕旋转架进行360°旋转。本发明还公开了该复合型爬壁机器人的控制方法。本发明使得复合型爬壁机器
钩爪式六足爬壁机器人及其运动方法.pdf
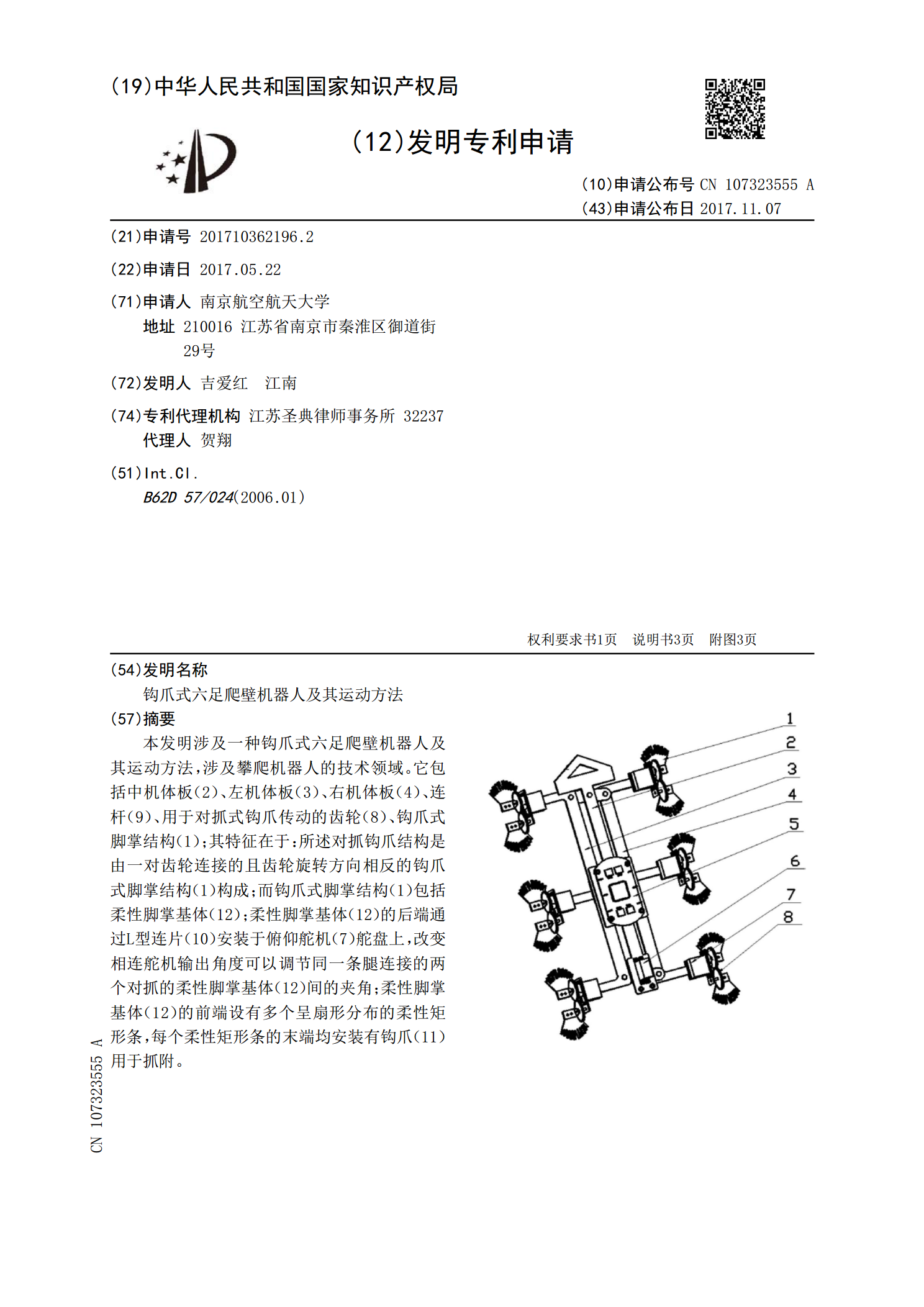
本发明涉及一种钩爪式六足爬壁机器人及其运动方法,涉及攀爬机器人的技术领域。它包括中机体板(2)、左机体板(3)、右机体板(4)、连杆(9)、用于对抓式钩爪传动的齿轮(8)、钩爪式脚掌结构(1);其特征在于:所述对抓钩爪结构是由一对齿轮连接的且齿轮旋转方向相反的钩爪式脚掌结构(1)构成;而钩爪式脚掌结构(1)包括柔性脚掌基体(12);柔性脚掌基体(12)的后端通过L型连片(10)安装于俯仰舵机(7)舵盘上,改变相连舵机输出角度可以调节同一条腿连接的两个对抓的柔性脚掌基体(12)间的夹角;柔性脚掌基体(12)
爬壁机器人.pdf
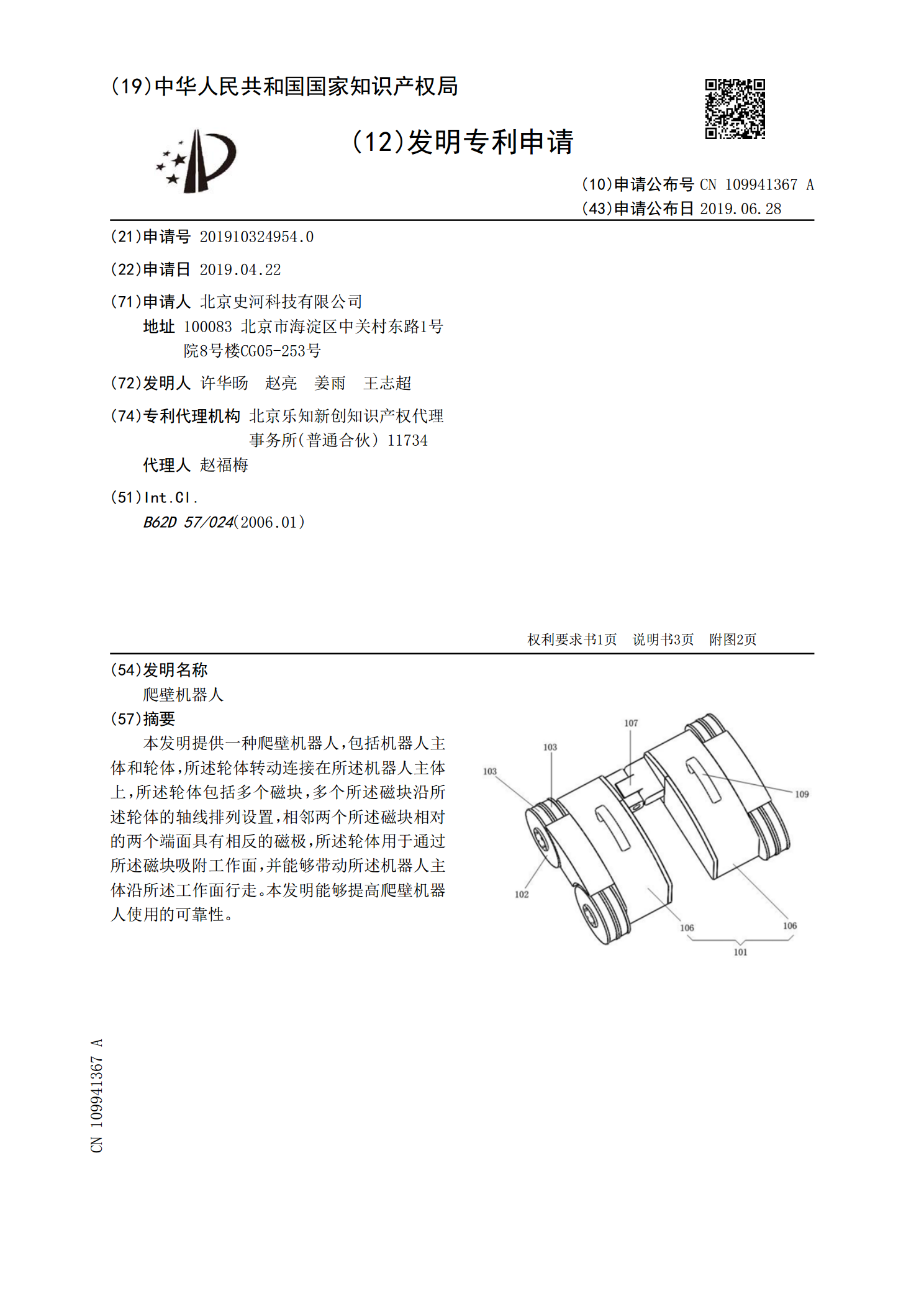
本发明提供一种爬壁机器人,包括机器人主体和轮体,所述轮体转动连接在所述机器人主体上,所述轮体包括多个磁块,多个所述磁块沿所述轮体的轴线排列设置,相邻两个所述磁块相对的两个端面具有相反的磁极,所述轮体用于通过所述磁块吸附工作面,并能够带动所述机器人主体沿所述工作面行走。本发明能够提高爬壁机器人使用的可靠性。
爬壁机器人.pdf
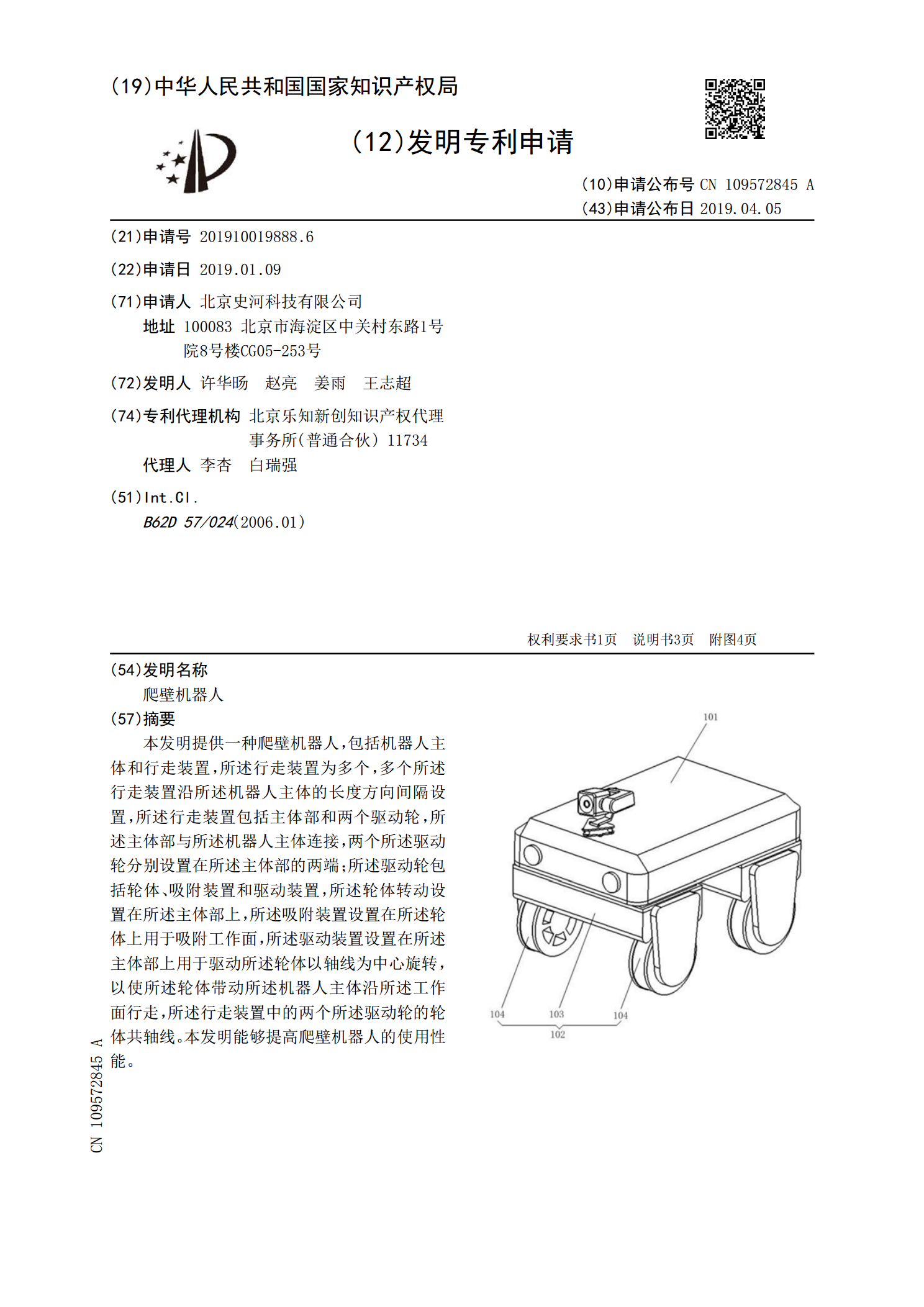
本发明提供一种爬壁机器人,包括机器人主体和行走装置,所述行走装置为多个,多个所述行走装置沿所述机器人主体的长度方向间隔设置,所述行走装置包括主体部和两个驱动轮,所述主体部与所述机器人主体连接,两个所述驱动轮分别设置在所述主体部的两端;所述驱动轮包括轮体、吸附装置和驱动装置,所述轮体转动设置在所述主体部上,所述吸附装置设置在所述轮体上用于吸附工作面,所述驱动装置设置在所述主体部上用于驱动所述轮体以轴线为中心旋转,以使所述轮体带动所述机器人主体沿所述工作面行走,所述行走装置中的两个所述驱动轮的轮体共轴线。本发