
复合型爬壁机器人及其控制方法.pdf

飞飙****ng

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
复合型爬壁机器人及其控制方法.pdf
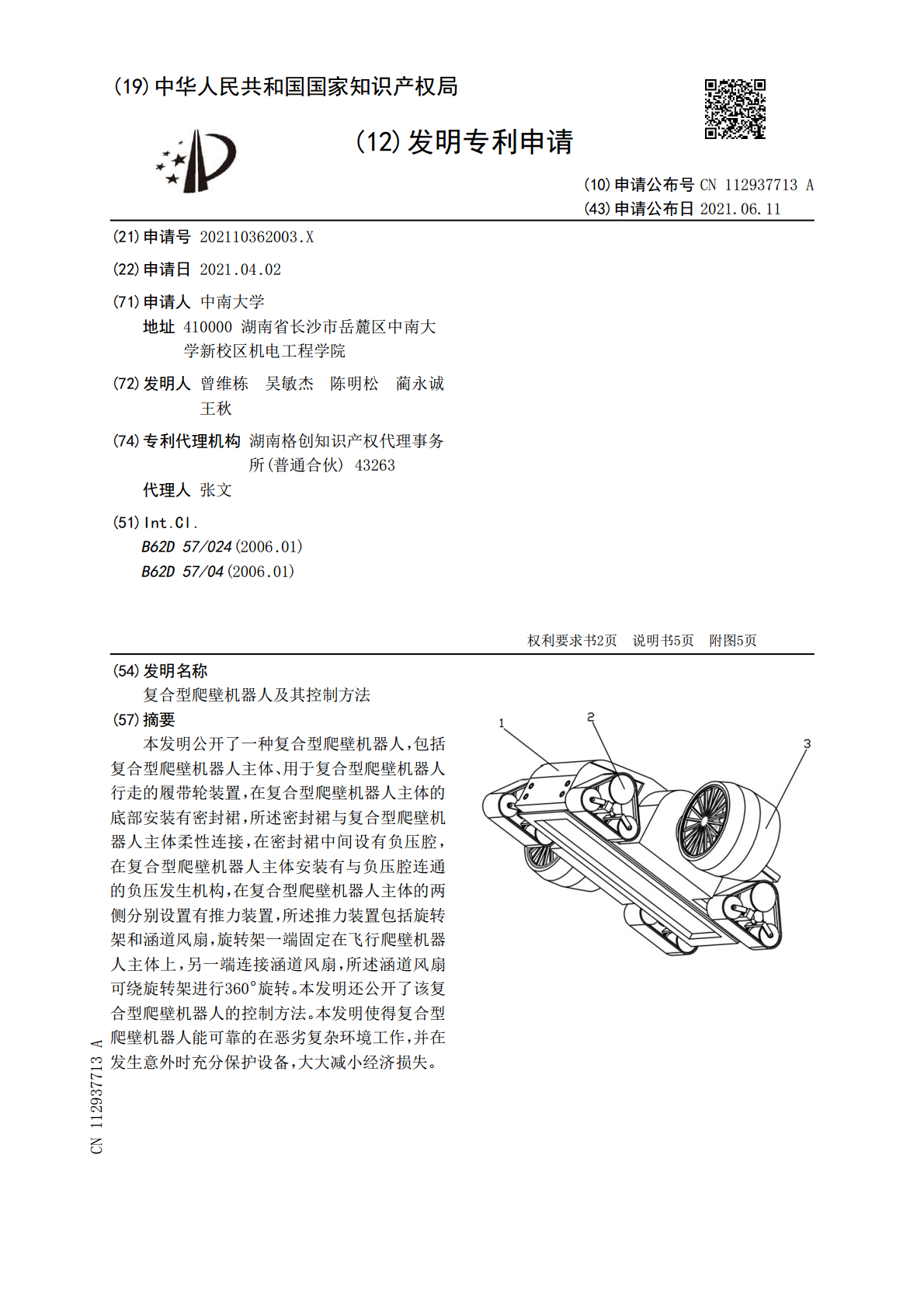
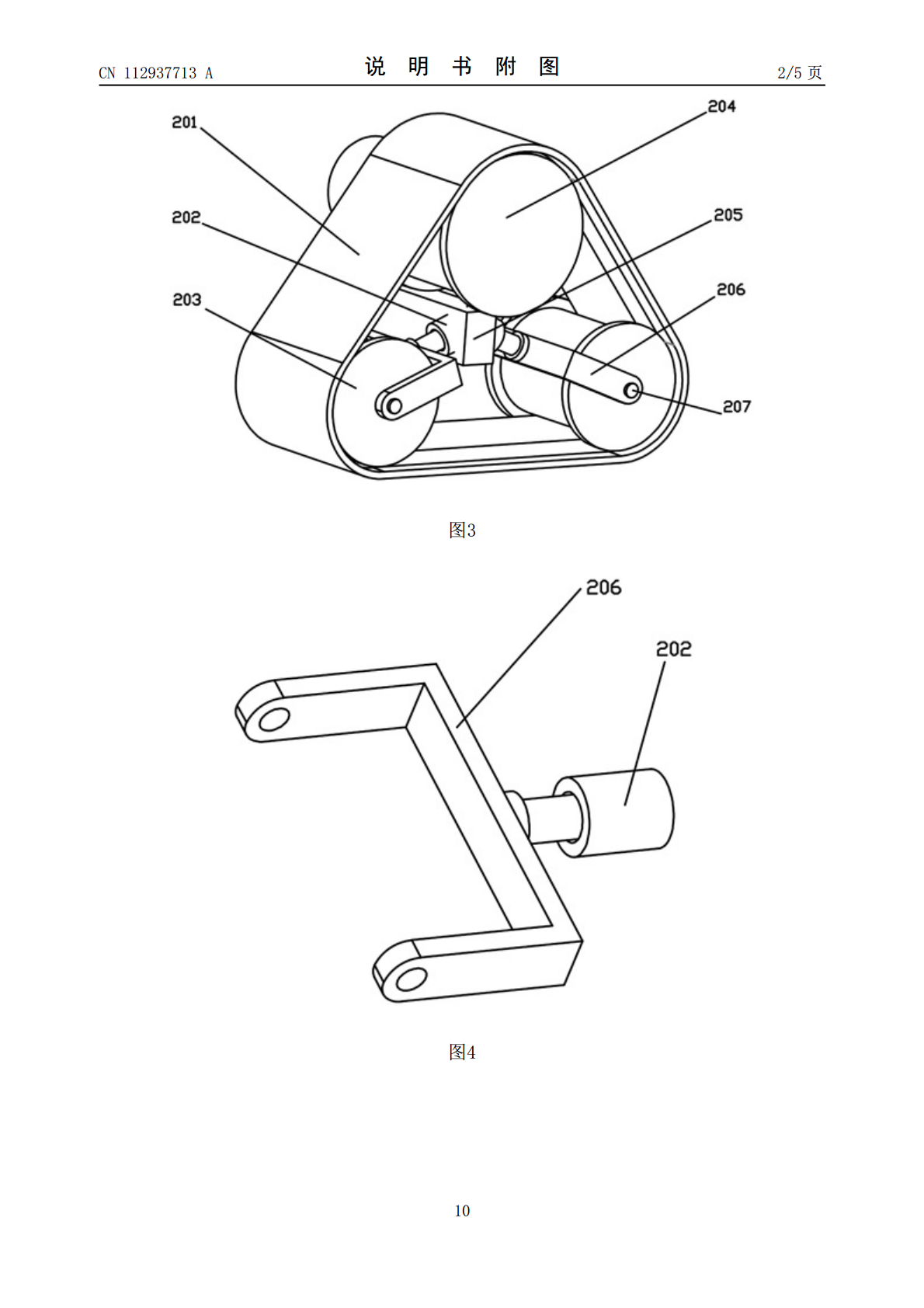
本发明公开了一种复合型爬壁机器人,包括复合型爬壁机器人主体、用于复合型爬壁机器人行走的履带轮装置,在复合型爬壁机器人主体的底部安装有密封裙,所述密封裙与复合型爬壁机器人主体柔性连接,在密封裙中间设有负压腔,在复合型爬壁机器人主体安装有与负压腔连通的负压发生机构,在复合型爬壁机器人主体的两侧分别设置有推力装置,所述推力装置包括旋转架和涵道风扇,旋转架一端固定在飞行爬壁机器人主体上,另一端连接涵道风扇,所述涵道风扇可绕旋转架进行360°旋转。本发明还公开了该复合型爬壁机器人的控制方法。本发明使得复合型爬壁机器
爬壁机器人运动控制方法.pdf
本发明公开了一种爬壁机器人运动控制方法,首先确定所述本体的初始姿态信息,获取所述本体的姿态信息,根据所述初始姿态信息,解析所述姿态信息获得所述本体的偏航角;从所述第一车轮编码器获取所述本体的第一车轮转速,从所述第二车轮编码器获取所述本体的第二车轮转速,将所述第一车轮转速与所述第二车轮转速做减法运算,获得车轮差速,根据所述车轮差速判断机器人姿态变化,根据所述车轮差速和所述偏航角,调节所述固定涵道的风扇转速、所述第一车轮的转速和转动方向、所述第二车轮的转速和转动方向,修正所述偏航角,使所述偏航角修正,保持机器

气动多囊式软体爬壁机器人及其控制方法.pdf
本发明提供了一种气动多囊式软体爬壁机器人及其控制方法,包括:吸附部件、气囊部件、充放气部件以及气动供给部件;所述吸附部件位于气囊部件内部,所述气动供给部件通过充放气部件给气囊部件充气,使得气囊部件的不同部分处于充气状态或者放气状态,通过改变气囊部件不同部分的充放气状态实现对应吸附部件与支撑物之间的吸附和分离,并配合吸附部件的吸附和分离动作完成指定的运动。本发明打破爬壁机器人刚体结构的传统,将新型软体机器人赋予爬壁功能,结构简单,自由度高,能够实现前进、后退、转弯、曲面爬行等运动方式。
轮式爬壁机器人及其工作方法.pdf
本发明公开了一种轮式爬壁机器人及其工作方法,属于机器人技术领域。机器人本体主要包括机架(2)、N个粘附轮式驱动装置(1)、以及涵道风扇(3);上述粘附轮式驱动装置(1)安装于机架(2)上,每个粘附轮式驱动装置(1)均由主动同步轮(8)、诱导轮(9)、拖带同步轮(10)以及同步带(11)组成;同步带(11)外表面粘贴粘附材料(12)组成;上述涵道风扇(3)安装于机架(2)上,提供推力,作为粘附材料(12)的预压力,使机器人粘附于垂直面上。机器人的移动速度快,工作效率高,可用于楼宇、太阳能帆板、大型风机等表面
一种爬壁机器人及其主动粘附控制方法.pdf
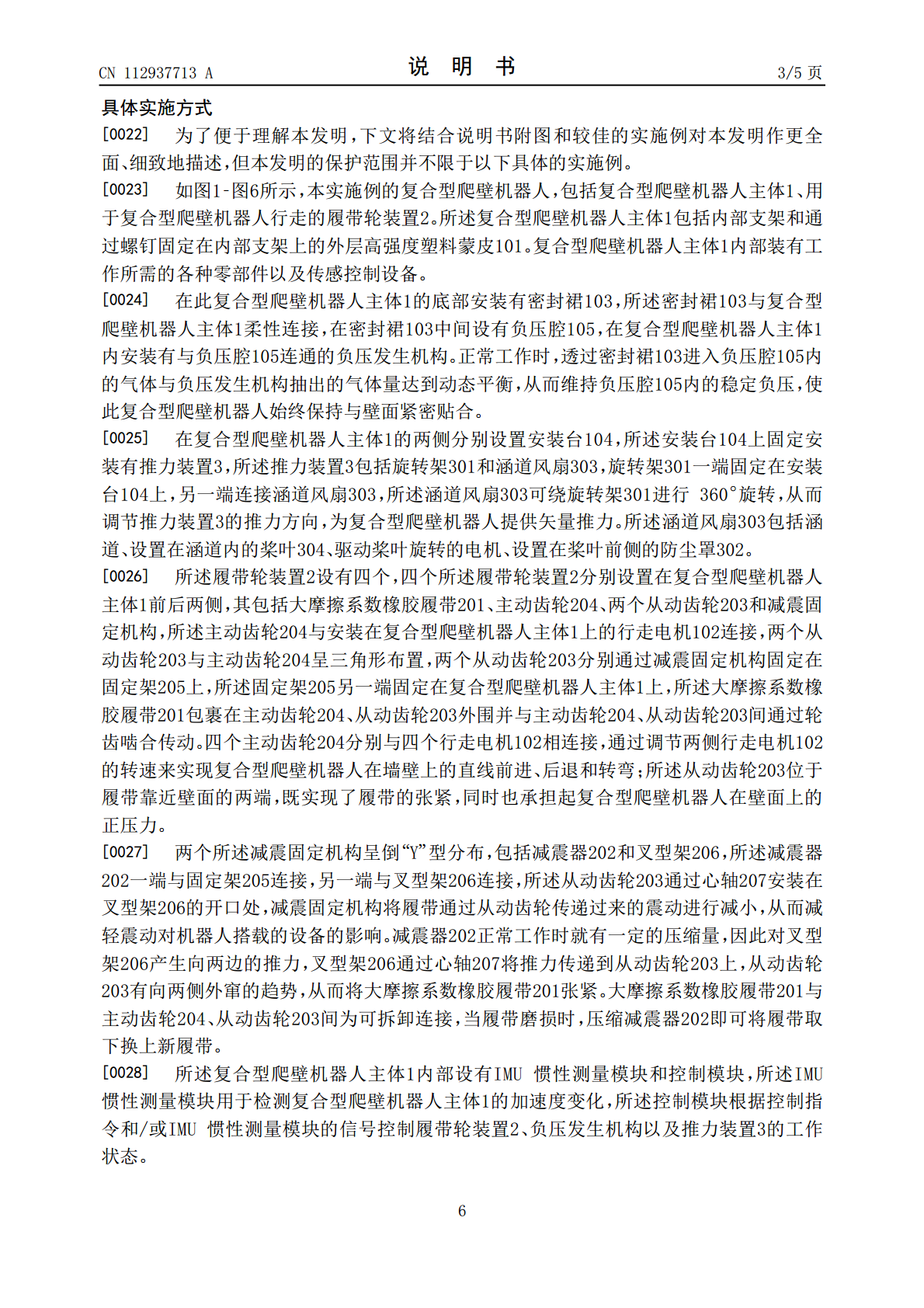
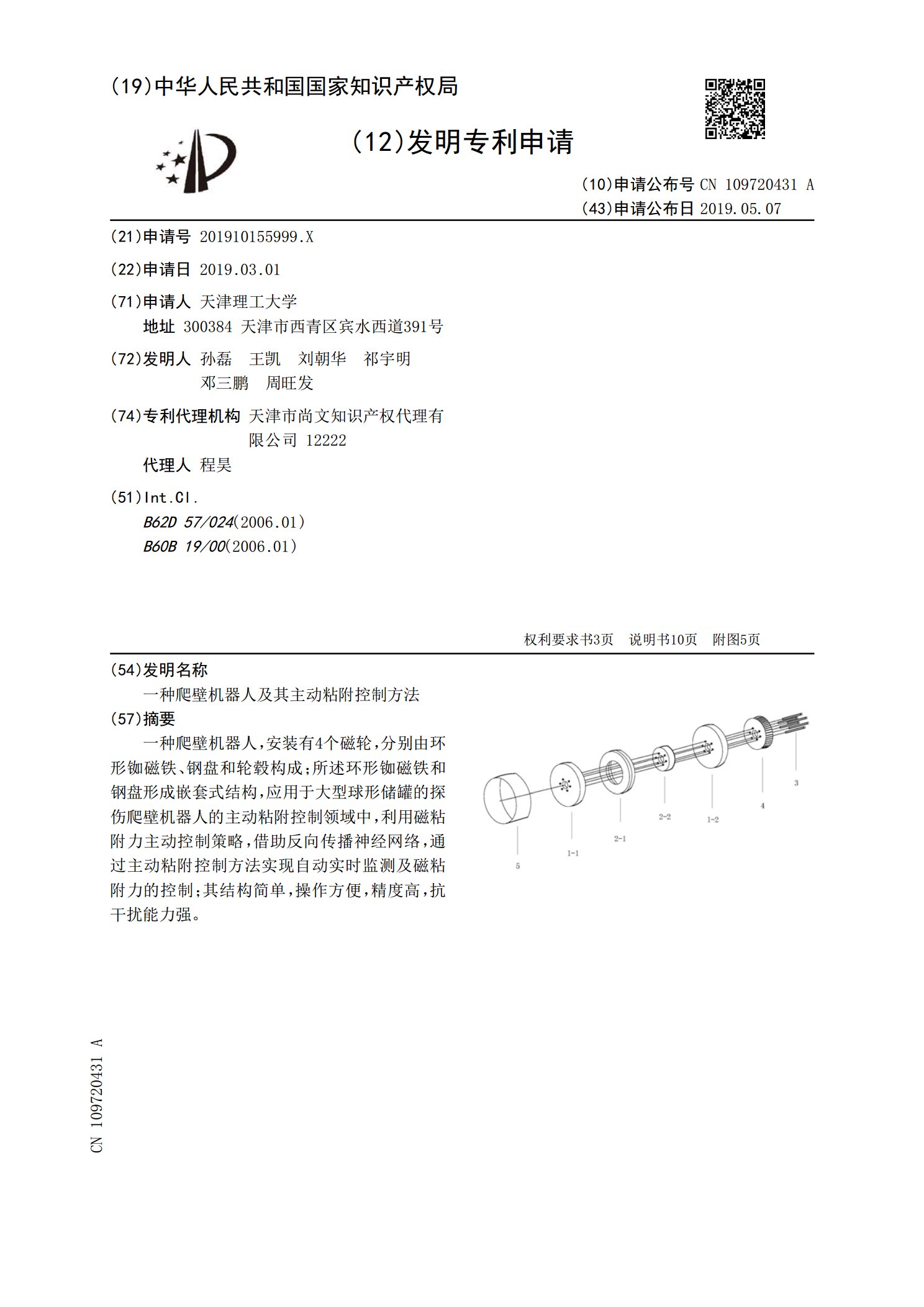
一种爬壁机器人,安装有4个磁轮,分别由环形铷磁铁、钢盘和轮毂构成;所述环形铷磁铁和钢盘形成嵌套式结构,应用于大型球形储罐的探伤爬壁机器人的主动粘附控制领域中,利用磁粘附力主动控制策略,借助反向传播神经网络,通过主动粘附控制方法实现自动实时监测及磁粘附力的控制;其结构简单,操作方便,精度高,抗干扰能力强。