
钩爪式六足爬壁机器人及其运动方法.pdf

葫芦****io

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
钩爪式六足爬壁机器人及其运动方法.pdf
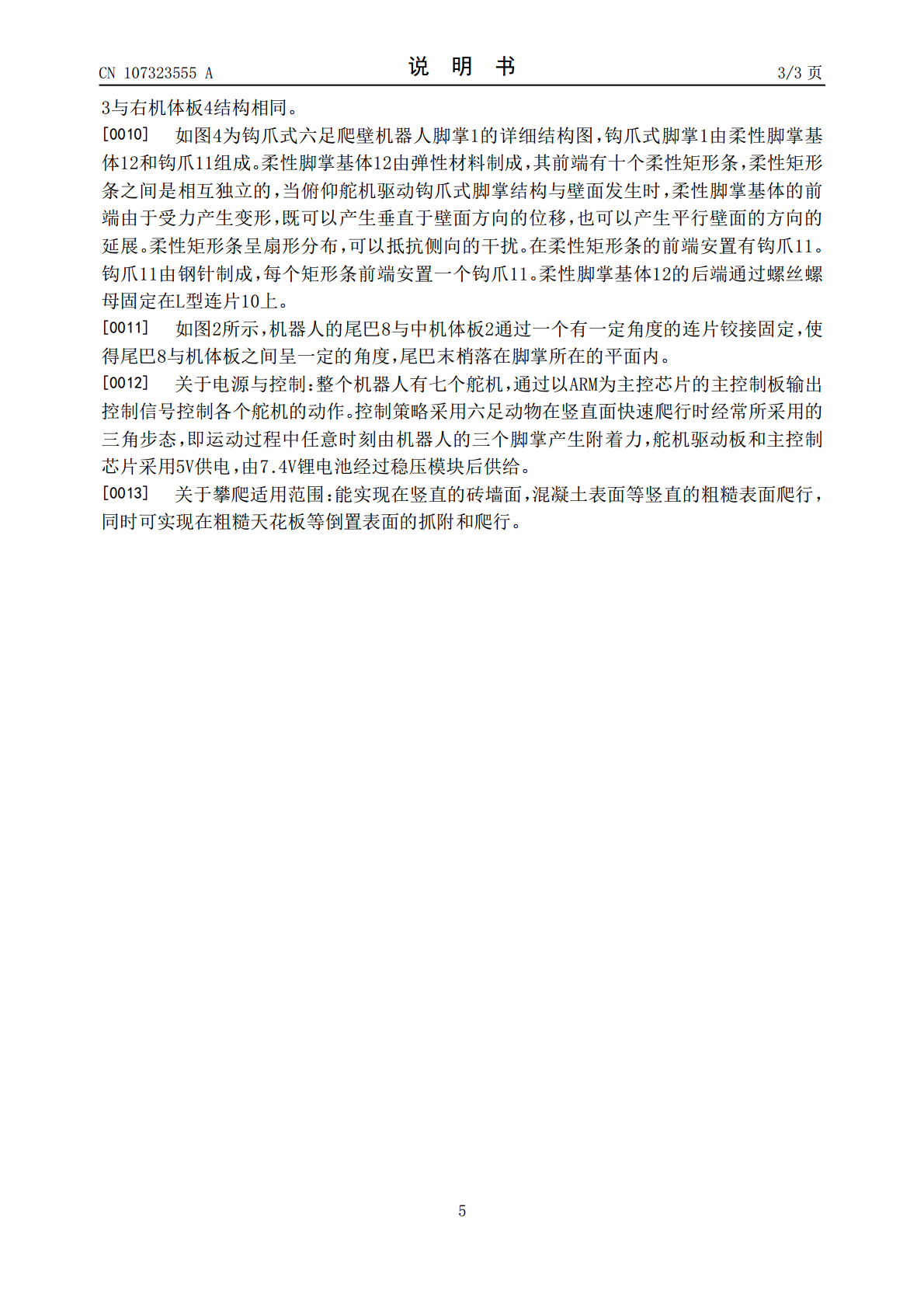
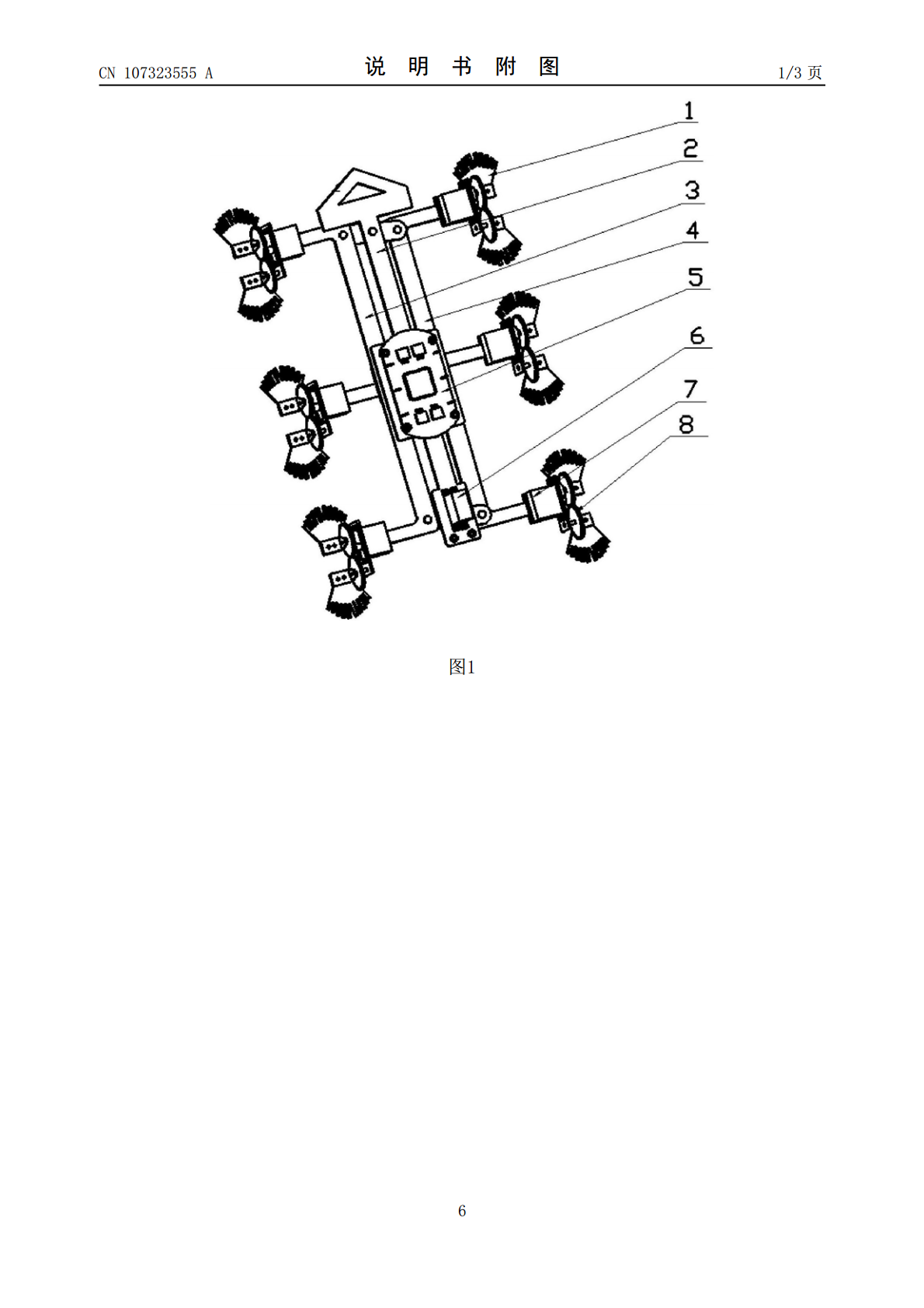
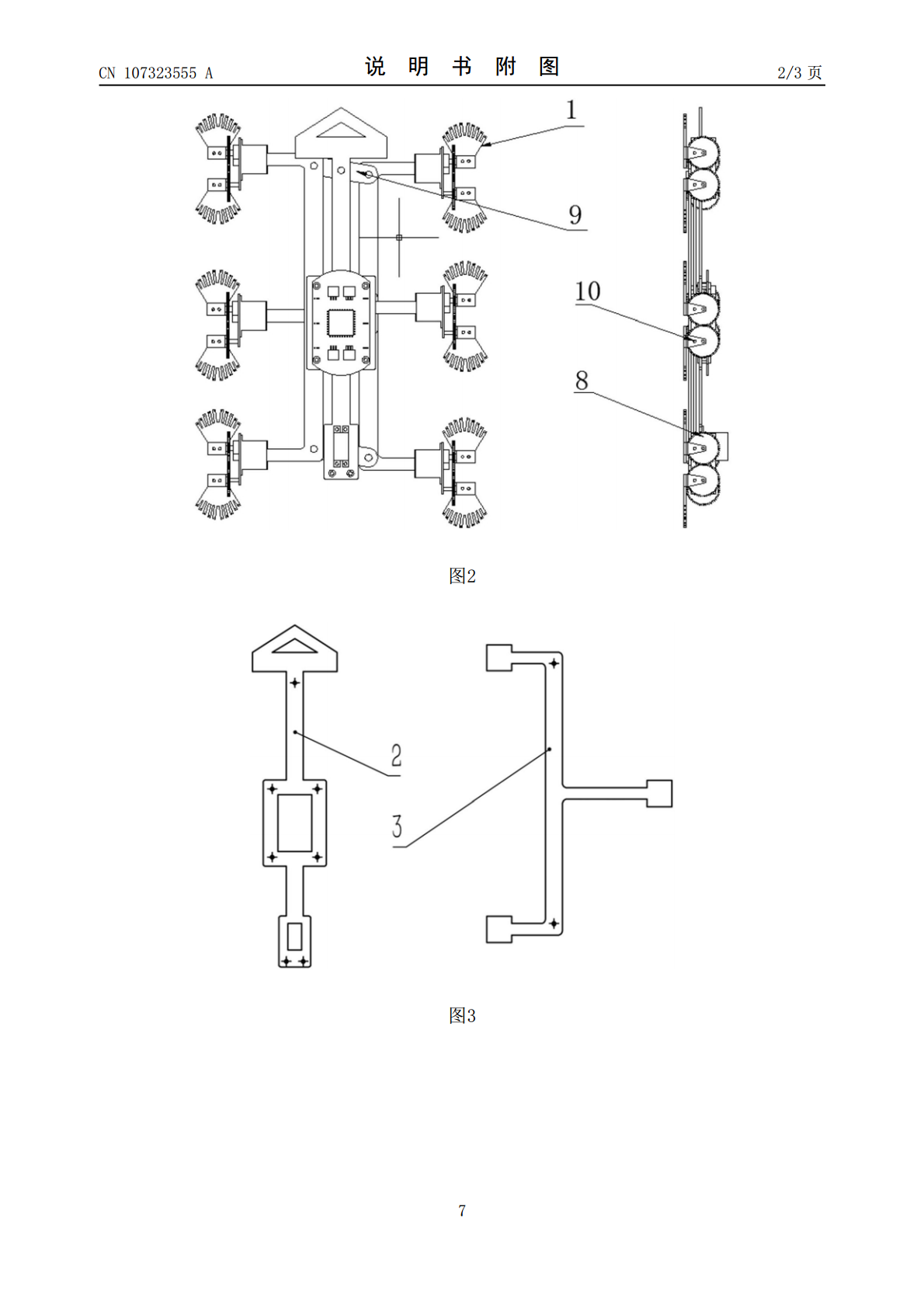
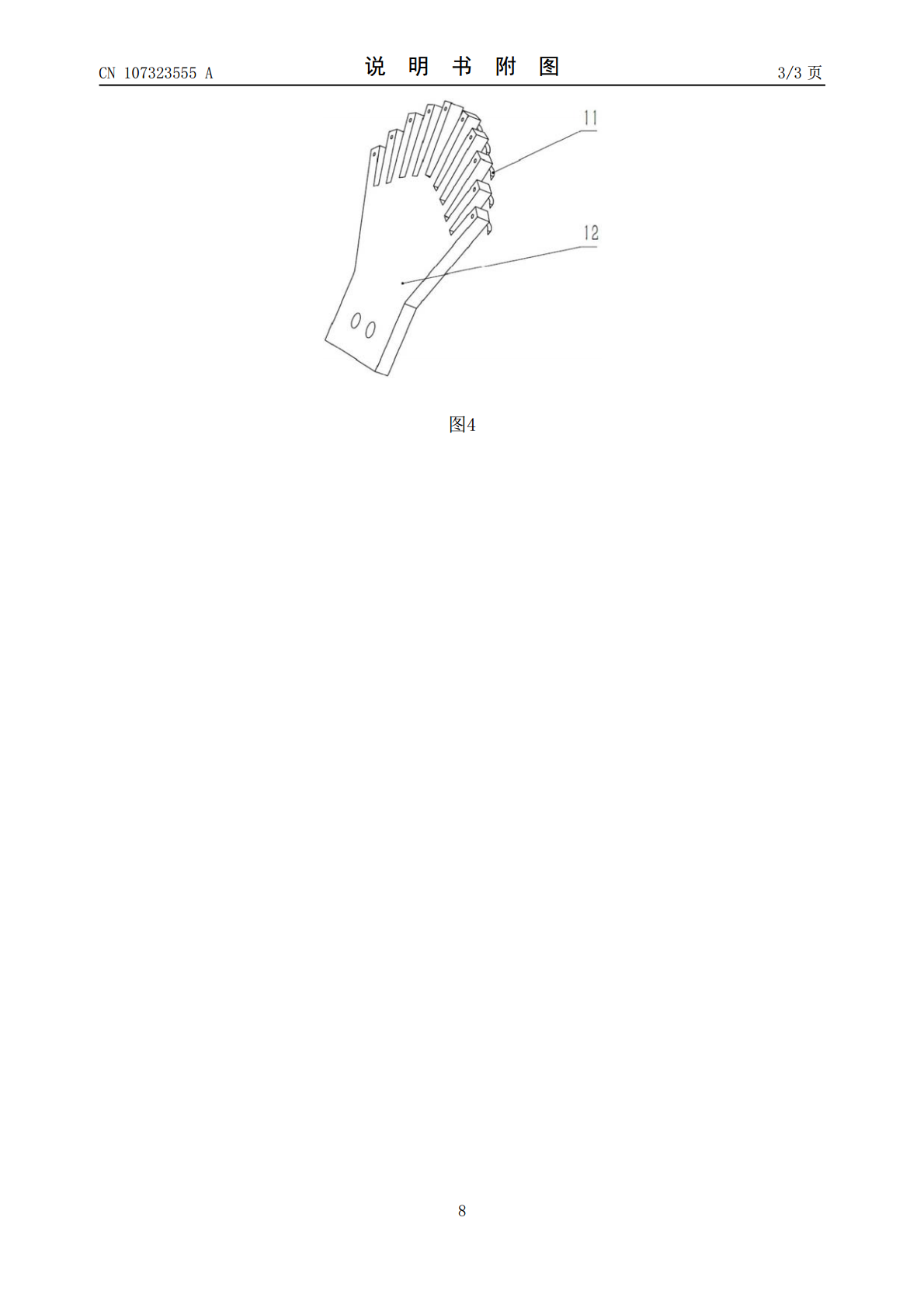
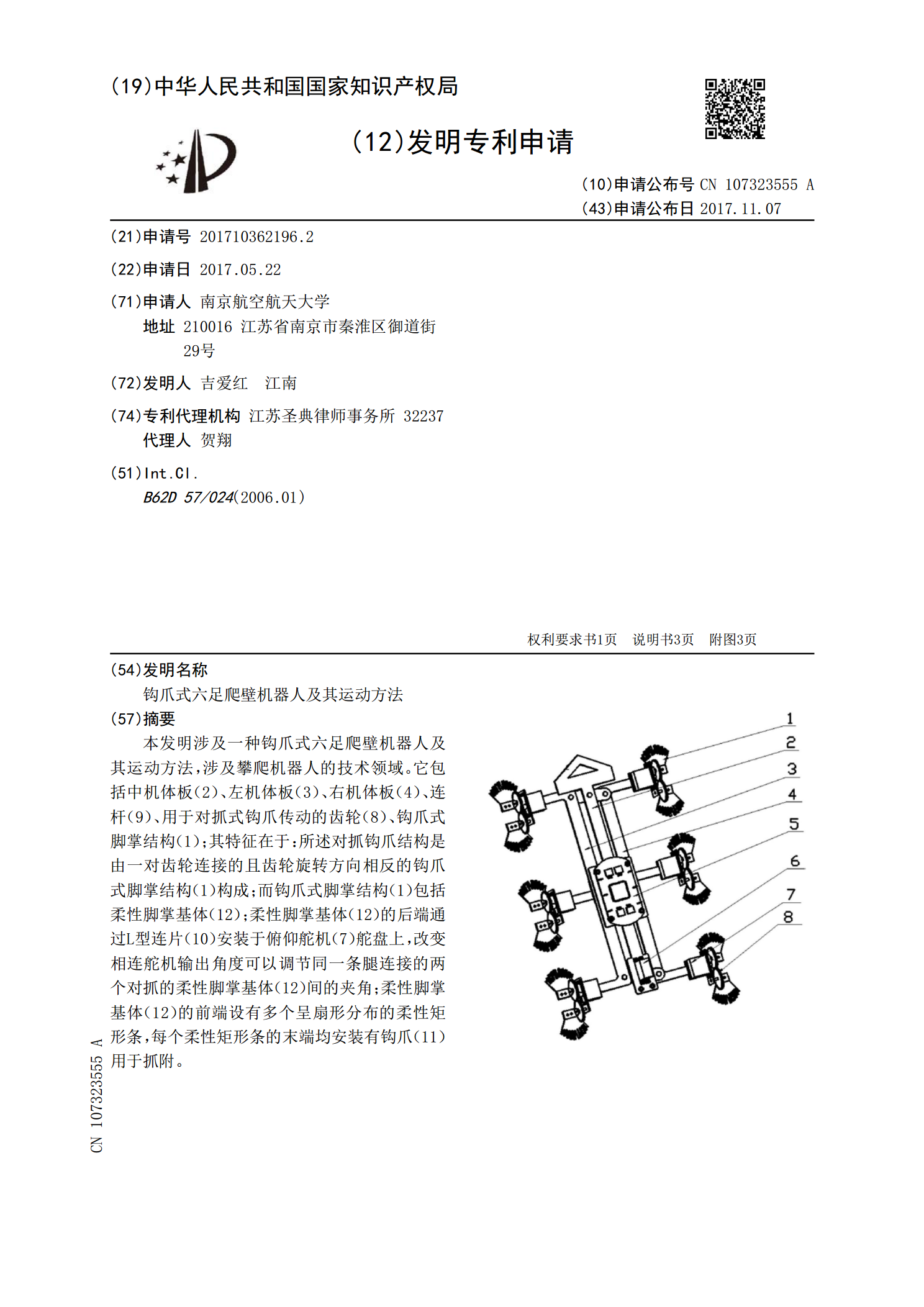
本发明涉及一种钩爪式六足爬壁机器人及其运动方法,涉及攀爬机器人的技术领域。它包括中机体板(2)、左机体板(3)、右机体板(4)、连杆(9)、用于对抓式钩爪传动的齿轮(8)、钩爪式脚掌结构(1);其特征在于:所述对抓钩爪结构是由一对齿轮连接的且齿轮旋转方向相反的钩爪式脚掌结构(1)构成;而钩爪式脚掌结构(1)包括柔性脚掌基体(12);柔性脚掌基体(12)的后端通过L型连片(10)安装于俯仰舵机(7)舵盘上,改变相连舵机输出角度可以调节同一条腿连接的两个对抓的柔性脚掌基体(12)间的夹角;柔性脚掌基体(12)
基于钩爪和黏附材料的滚轮式爬壁机器人及其运动方法.pdf
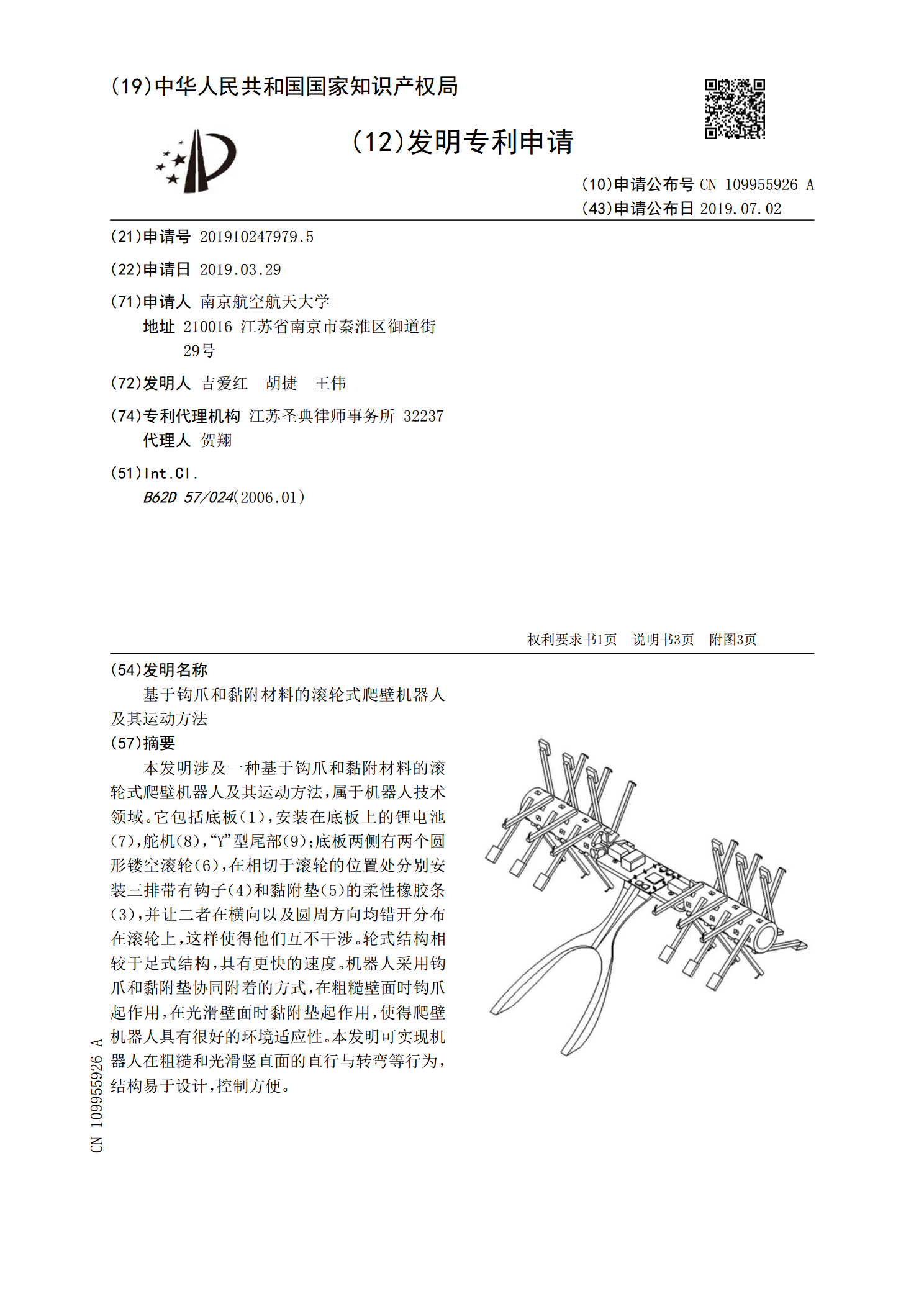
本发明涉及一种基于钩爪和黏附材料的滚轮式爬壁机器人及其运动方法,属于机器人技术领域。它包括底板(1),安装在底板上的锂电池(7),舵机(8),“Y”型尾部(9);底板两侧有两个圆形镂空滚轮(6),在相切于滚轮的位置处分别安装三排带有钩子(4)和黏附垫(5)的柔性橡胶条(3),并让二者在横向以及圆周方向均错开分布在滚轮上,这样使得他们互不干涉。轮式结构相较于足式结构,具有更快的速度。机器人采用钩爪和黏附垫协同附着的方式,在粗糙壁面时钩爪起作用,在光滑壁面时黏附垫起作用,使得爬壁机器人具有很好的环境适应性。本

轮足式爬壁机器人机构.pdf
本发明涉及一种轮足式爬壁机器人机构,包括半圆柱形的第1本体及第2本体、连杆、第1吸盘足以及第2吸盘足,其中第1本体及第2本体下部分别设有第1吸盘足以及第2吸盘足,第1本体及第2本体轴线平行,以接触方式并行设置,在两本体并行设置的两端部分别通过连杆连接成具有能够相对旋转的结构;第1吸盘足采用负压吸附结构,第2吸盘足采用真空吸附结构;第1本体内设有行走轮。本发明有机地结合了轮式移动机构和足式移动机构的各自优点,机构具有较好的运动特性和力特性,移动速度快,越障能力强,曲面适应性好。
一种轮足转换式可越障爬壁机器人及其越障方法.pdf
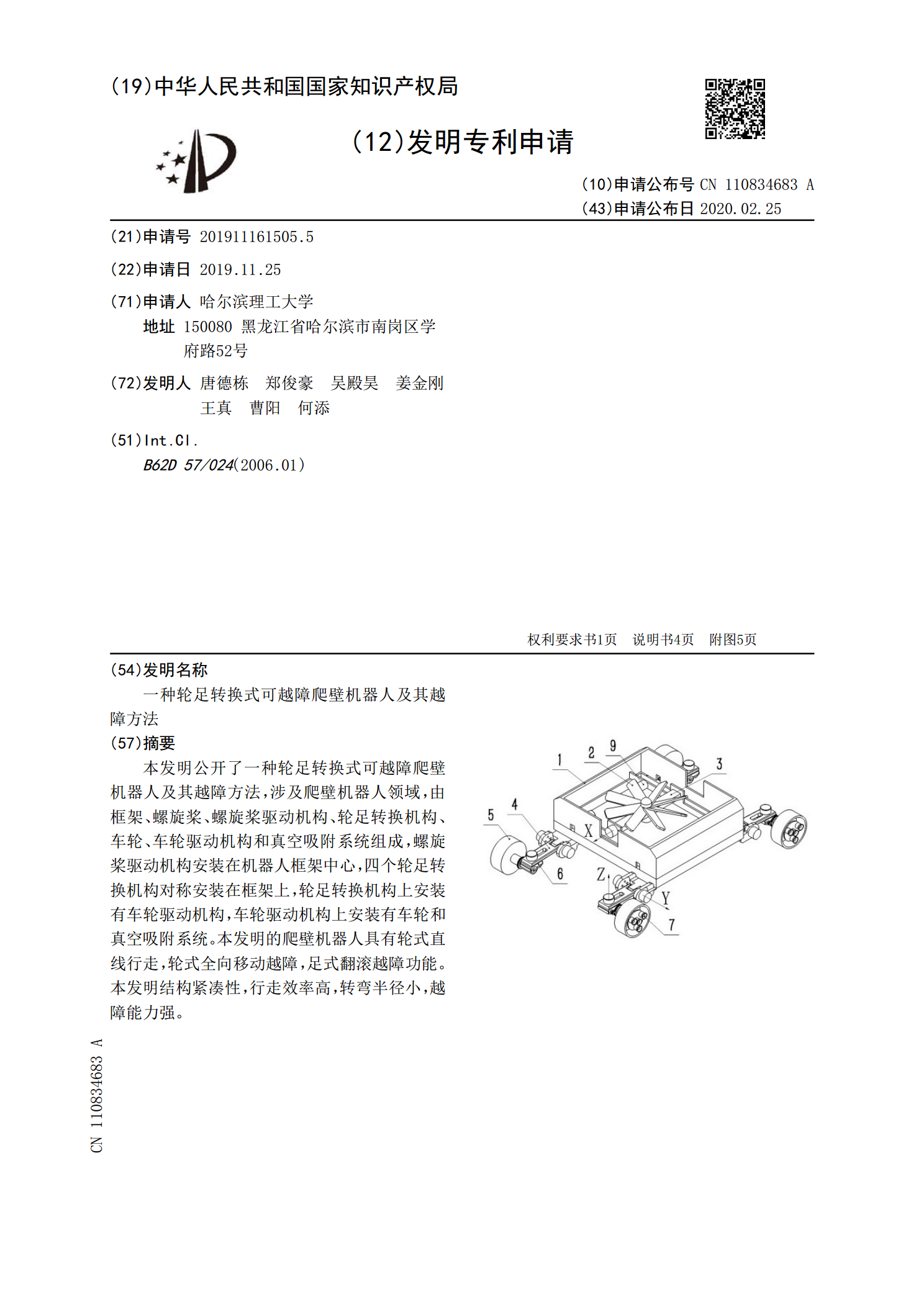
本发明公开了一种轮足转换式可越障爬壁机器人及其越障方法,涉及爬壁机器人领域,由框架、螺旋桨、螺旋桨驱动机构、轮足转换机构、车轮、车轮驱动机构和真空吸附系统组成,螺旋桨驱动机构安装在机器人框架中心,四个轮足转换机构对称安装在框架上,轮足转换机构上安装有车轮驱动机构,车轮驱动机构上安装有车轮和真空吸附系统。本发明的爬壁机器人具有轮式直线行走,轮式全向移动越障,足式翻滚越障功能。本发明结构紧凑性,行走效率高,转弯半径小,越障能力强。
一种新型足式爬壁机器人运动机构.pdf
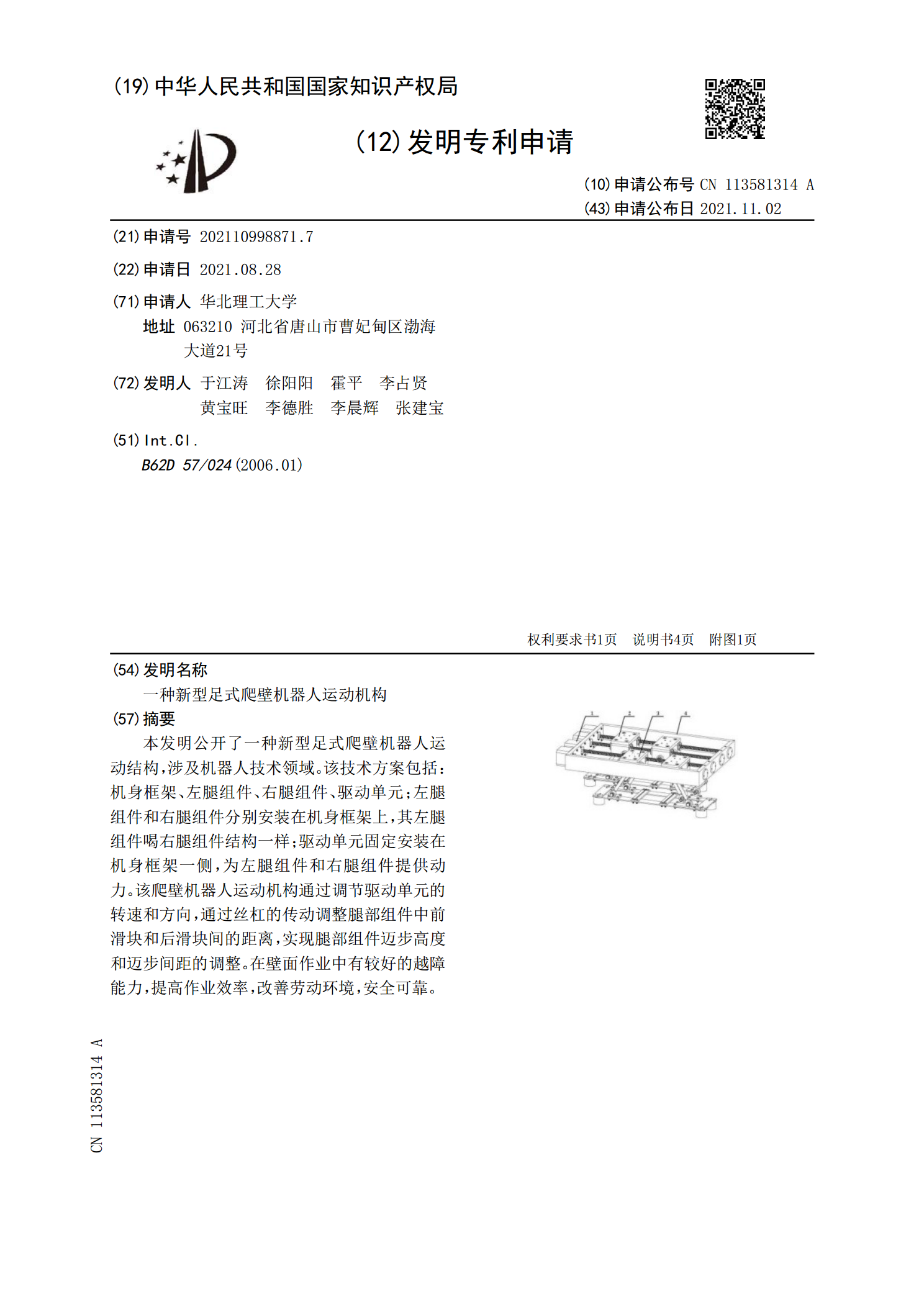
本发明公开了一种新型足式爬壁机器人运动结构,涉及机器人技术领域。该技术方案包括:机身框架、左腿组件、右腿组件、驱动单元;左腿组件和右腿组件分别安装在机身框架上,其左腿组件喝右腿组件结构一样;驱动单元固定安装在机身框架一侧,为左腿组件和右腿组件提供动力。该爬壁机器人运动机构通过调节驱动单元的转速和方向,通过丝杠的传动调整腿部组件中前滑块和后滑块间的距离,实现腿部组件迈步高度和迈步间距的调整。在壁面作业中有较好的越障能力,提高作业效率,改善劳动环境,安全可靠。