
车辆的行驶辅助系统.pdf

慧颖****23

1/10

2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆行驶辅助系统.pdf
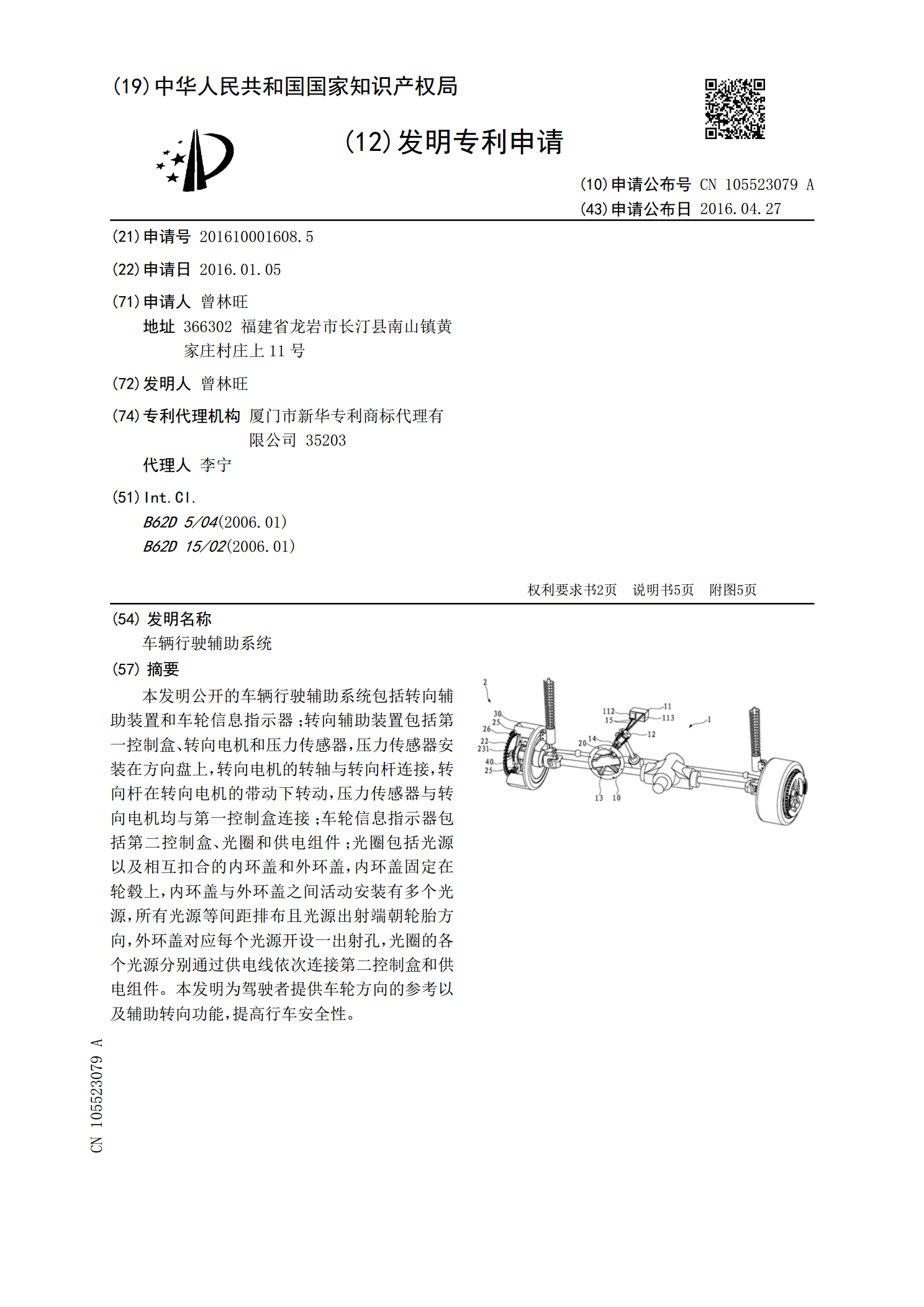
本发明公开的车辆行驶辅助系统包括转向辅助装置和车轮信息指示器;转向辅助装置包括第一控制盒、转向电机和压力传感器,压力传感器安装在方向盘上,转向电机的转轴与转向杆连接,转向杆在转向电机的带动下转动,压力传感器与转向电机均与第一控制盒连接;车轮信息指示器包括第二控制盒、光圈和供电组件;光圈包括光源以及相互扣合的内环盖和外环盖,内环盖固定在轮毂上,内环盖与外环盖之间活动安装有多个光源,所有光源等间距排布且光源出射端朝轮胎方向,外环盖对应每个光源开设一出射孔,光圈的各个光源分别通过供电线依次连接第二控制盒和供电组

车辆的行驶辅助系统.pdf
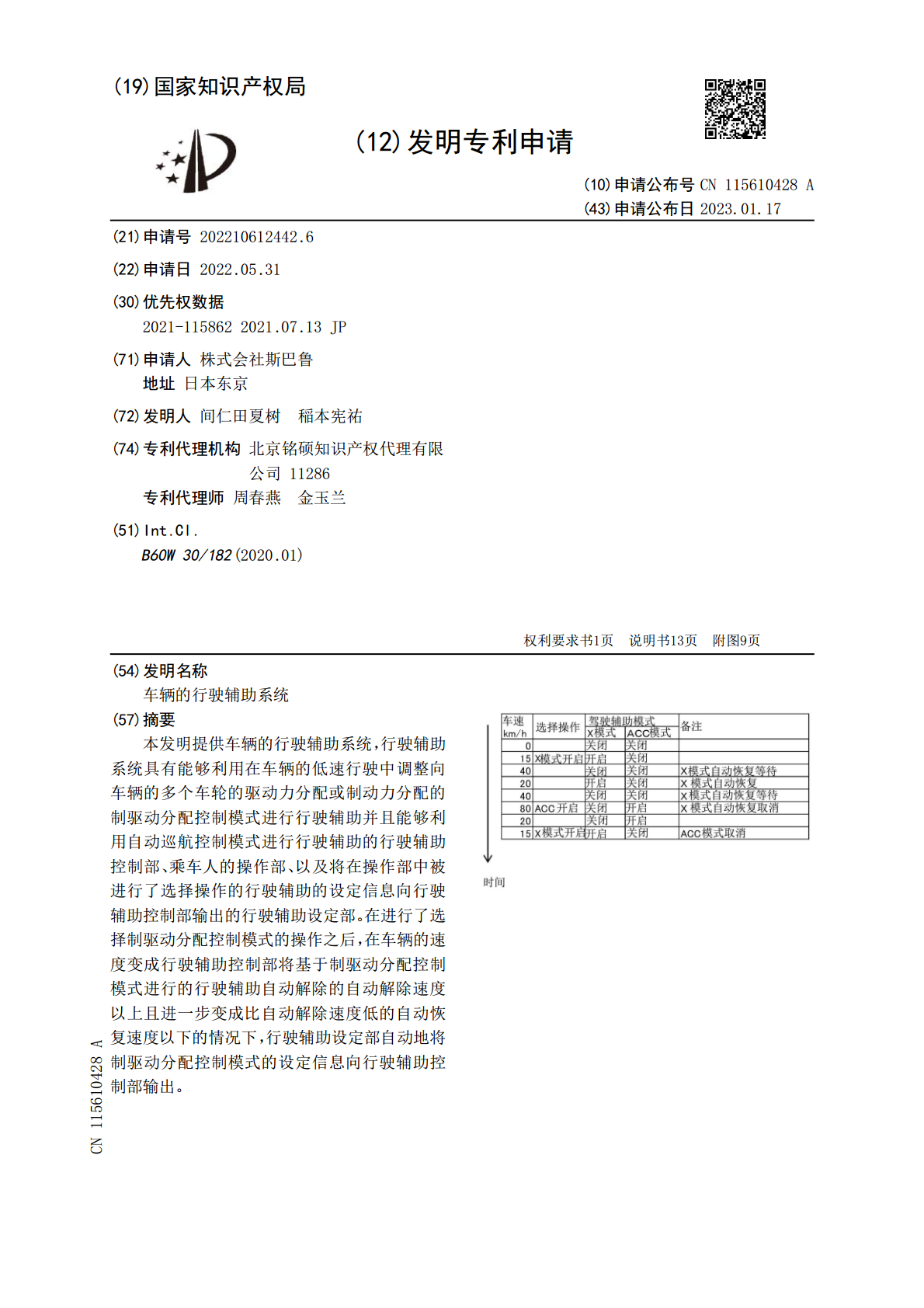
本发明提供车辆的行驶辅助系统,行驶辅助系统具有能够利用在车辆的低速行驶中调整向车辆的多个车轮的驱动力分配或制动力分配的制驱动分配控制模式进行行驶辅助并且能够利用自动巡航控制模式进行行驶辅助的行驶辅助控制部、乘车人的操作部、以及将在操作部中被进行了选择操作的行驶辅助的设定信息向行驶辅助控制部输出的行驶辅助设定部。在进行了选择制驱动分配控制模式的操作之后,在车辆的速度变成行驶辅助控制部将基于制驱动分配控制模式进行的行驶辅助自动解除的自动解除速度以上且进一步变成比自动解除速度低的自动恢复速度以下的情况下,行驶辅

一种行驶辅助系统、方法及车辆.pdf
本发明提供一种行驶辅助系统、方法及车辆,其中,行驶辅助系统应用于具有安全座椅的车辆,包括车速传感器、车辆加速度传感器、压力传感器、控制器、车速调节机构和车辆加速度调节机构,其中,压力传感器设置于所述安全座椅,所述车速传感器的信号输出端、所述车辆加速度传感器的信号输出端和所述压力传感器的信号输出端均与所述控制器的信号输入端电连接,所述控制器的信号输出端分别与所述车速调节机构的信号输入端和所述车辆加速度调节机构的信号输入端电连接。本发明提供的行驶辅助系统、方法及车辆,能够解决目前车辆在行驶过程中容易造成车内婴
车辆的行驶辅助装置.pdf
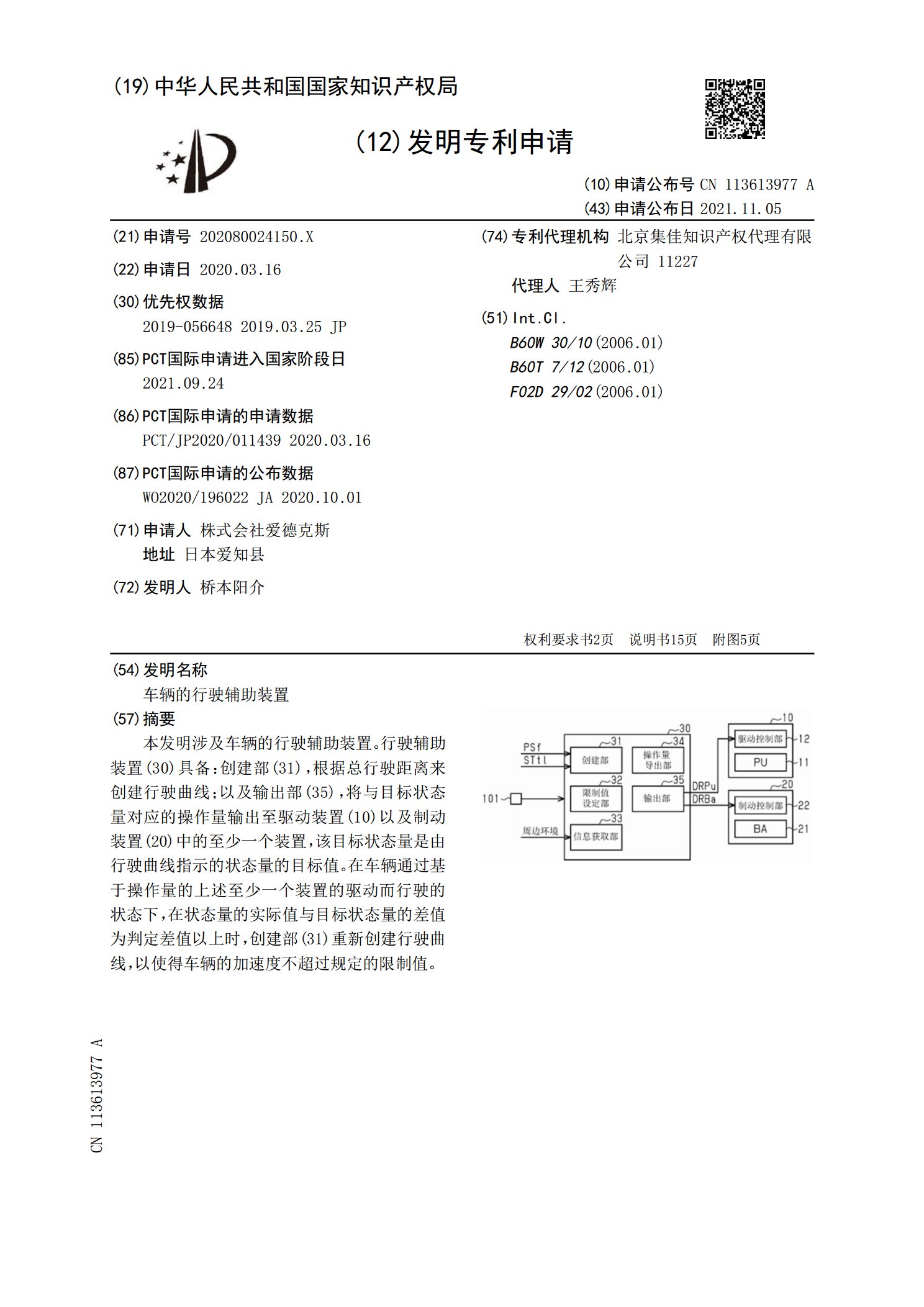
本发明涉及车辆的行驶辅助装置。行驶辅助装置(30)具备:创建部(31),根据总行驶距离来创建行驶曲线;以及输出部(35),将与目标状态量对应的操作量输出至驱动装置(10)以及制动装置(20)中的至少一个装置,该目标状态量是由行驶曲线指示的状态量的目标值。在车辆通过基于操作量的上述至少一个装置的驱动而行驶的状态下,在状态量的实际值与目标状态量的差值为判定差值以上时,创建部(31)重新创建行驶曲线,以使得车辆的加速度不超过规定的限制值。

车辆的行驶辅助装置.pdf
本发明提供一种在左轮与右轮之间产生制动力差而使车辆进行偏航运动时,能够抑制车辆减速度与要求减速度的偏差的车辆的行驶辅助装置。车辆的行驶辅助装置将目标偏航力矩(MRq)中的一半分配至内侧轮,将目标偏航力矩(MRq)中的剩余分配至外侧轮(步骤S64),分配至内侧轮的目标偏航力矩(MRq)越大,则越增多内侧轮的制动力的增大量(BPI),分配外侧轮的目标偏航力矩(MRq)越大,则越加大该外侧轮的制动力的减少量(BPO)(步骤S65),与内侧轮的制动力的增大量(BPI)相应地使内侧轮的制动力增大,与外侧轮的制动力的