
一种无人车.pdf

邻家****mk

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种无人车.pdf
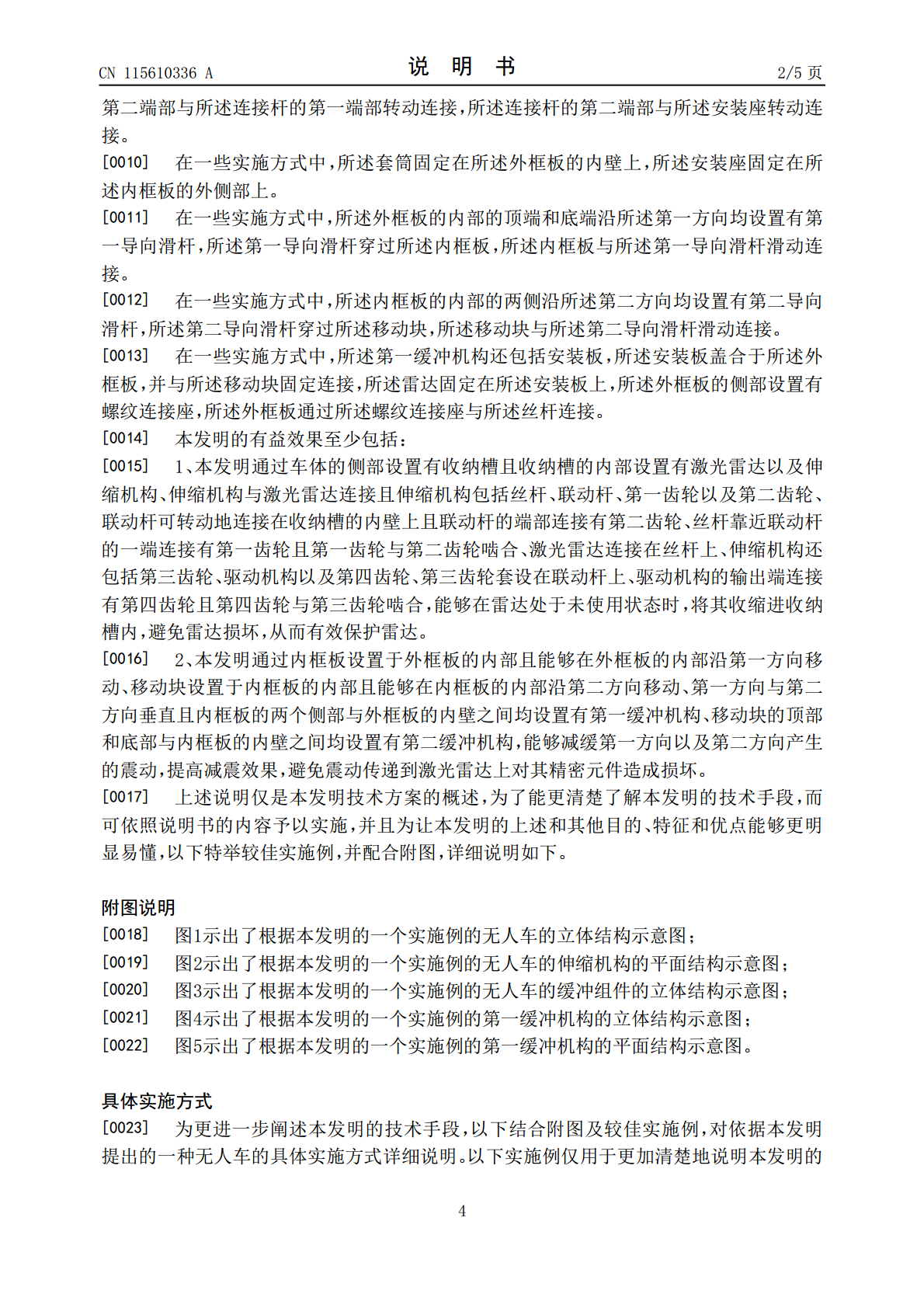
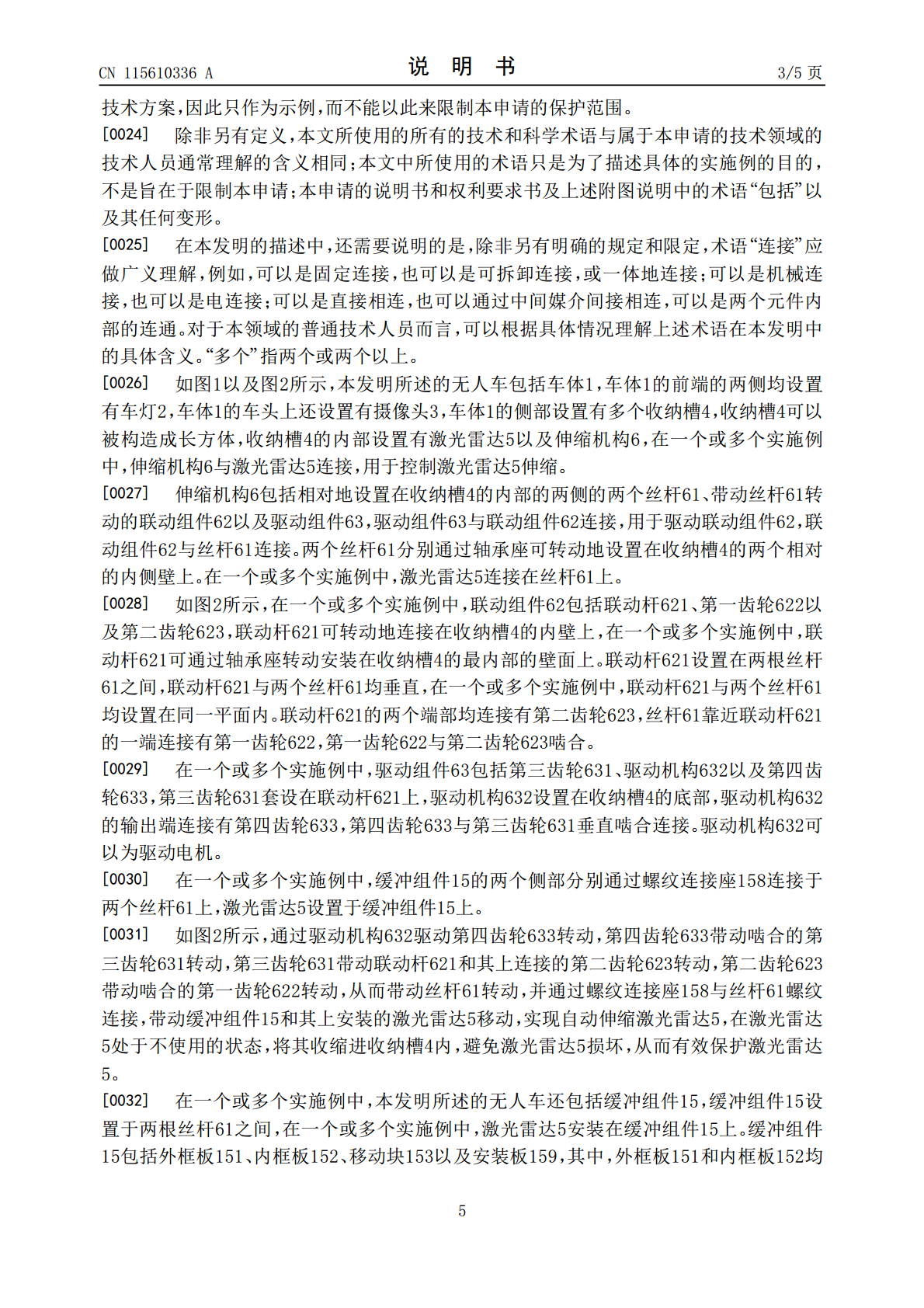
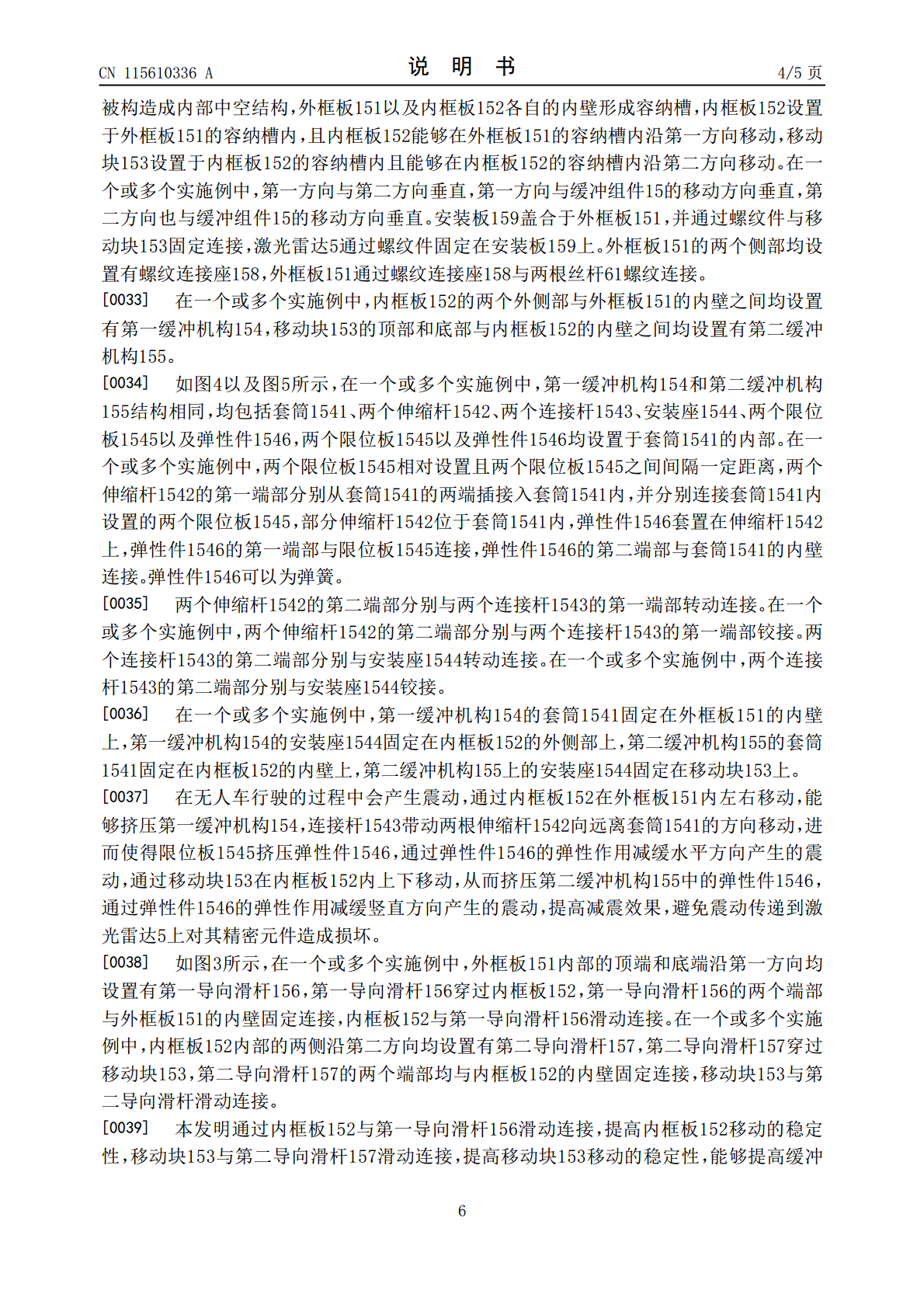
本发明涉及一种无人车,包括车体,车体的侧部设置有收纳槽,收纳槽的内部设置有激光雷达以及伸缩机构,伸缩机构与激光雷达连接,伸缩机构包括丝杆、联动杆、第一齿轮以及第二齿轮,联动杆可转动地连接在收纳槽的内壁上,联动杆的端部连接有第二齿轮,丝杆靠近联动杆的一端连接有第一齿轮,第一齿轮与第二齿轮啮合,激光雷达连接在丝杆上,伸缩机构还包括第三齿轮、驱动机构以及第四齿轮,第三齿轮套设在联动杆上,驱动机构的输出端连接有第四齿轮,第四齿轮与第三齿轮啮合。本发明能够在雷达处于未使用状态时,将其收缩进收纳槽内,避免雷达损坏,从
一种无人车.pdf
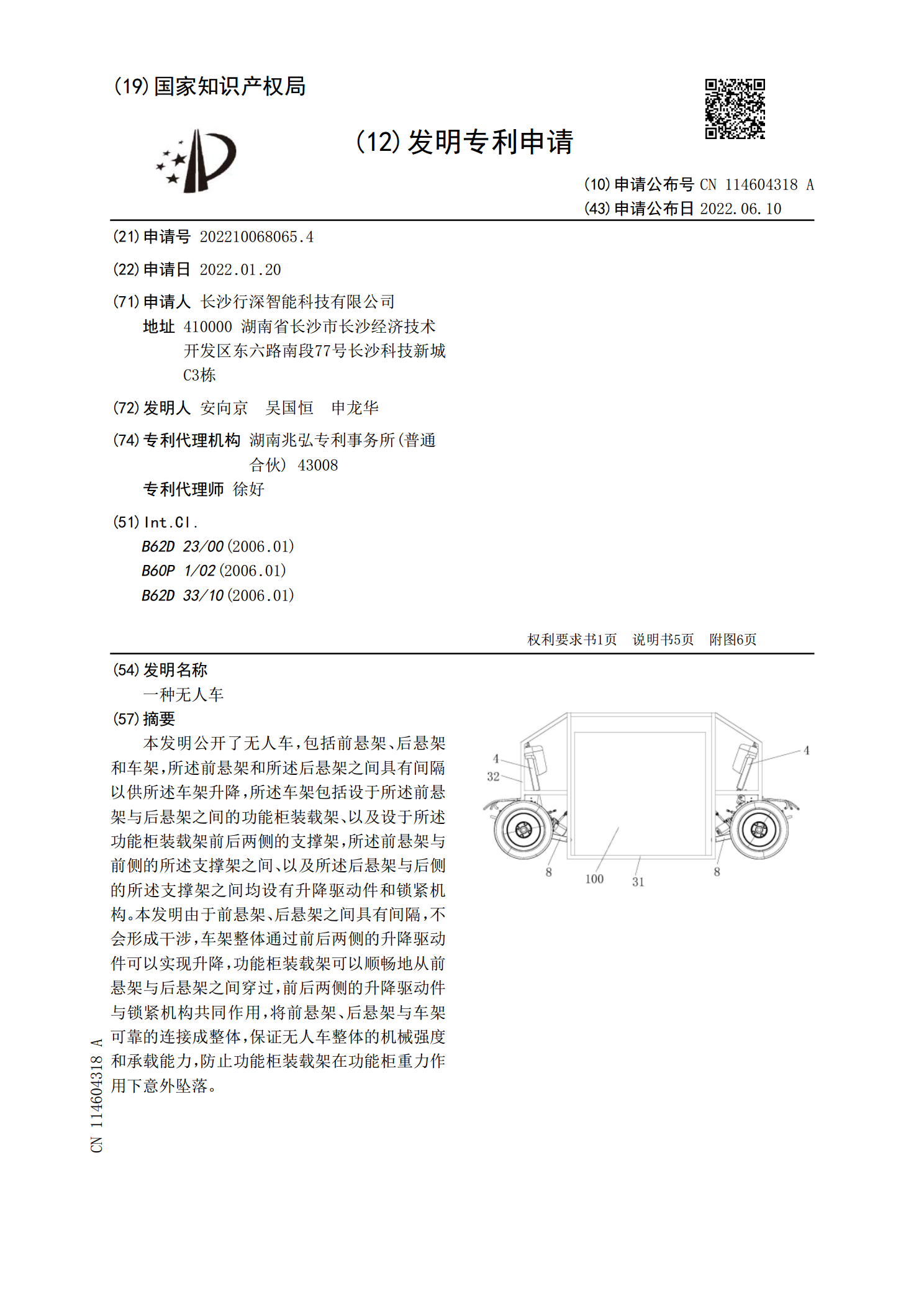
本发明公开了无人车,包括前悬架、后悬架和车架,所述前悬架和所述后悬架之间具有间隔以供所述车架升降,所述车架包括设于所述前悬架与后悬架之间的功能柜装载架、以及设于所述功能柜装载架前后两侧的支撑架,所述前悬架与前侧的所述支撑架之间、以及所述后悬架与后侧的所述支撑架之间均设有升降驱动件和锁紧机构。本发明由于前悬架、后悬架之间具有间隔,不会形成干涉,车架整体通过前后两侧的升降驱动件可以实现升降,功能柜装载架可以顺畅地从前悬架与后悬架之间穿过,前后两侧的升降驱动件与锁紧机构共同作用,将前悬架、后悬架与车架可靠的连接
一种无人车.pdf
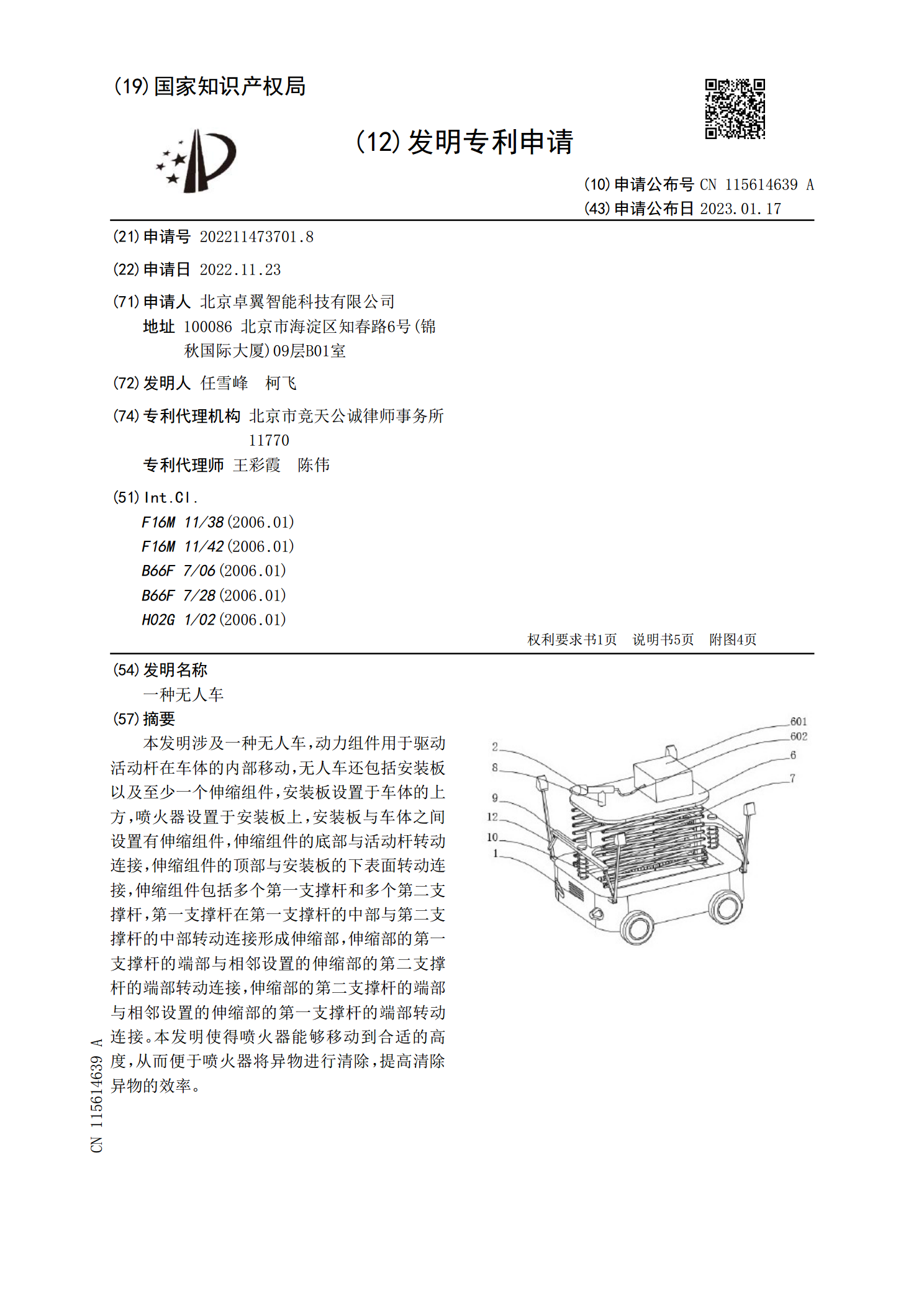
本发明涉及一种无人车,动力组件用于驱动活动杆在车体的内部移动,无人车还包括安装板以及至少一个伸缩组件,安装板设置于车体的上方,喷火器设置于安装板上,安装板与车体之间设置有伸缩组件,伸缩组件的底部与活动杆转动连接,伸缩组件的顶部与安装板的下表面转动连接,伸缩组件包括多个第一支撑杆和多个第二支撑杆,第一支撑杆在第一支撑杆的中部与第二支撑杆的中部转动连接形成伸缩部,伸缩部的第一支撑杆的端部与相邻设置的伸缩部的第二支撑杆的端部转动连接,伸缩部的第二支撑杆的端部与相邻设置的伸缩部的第一支撑杆的端部转动连接。本发明使
一种无人车车架结构及无人车.pdf
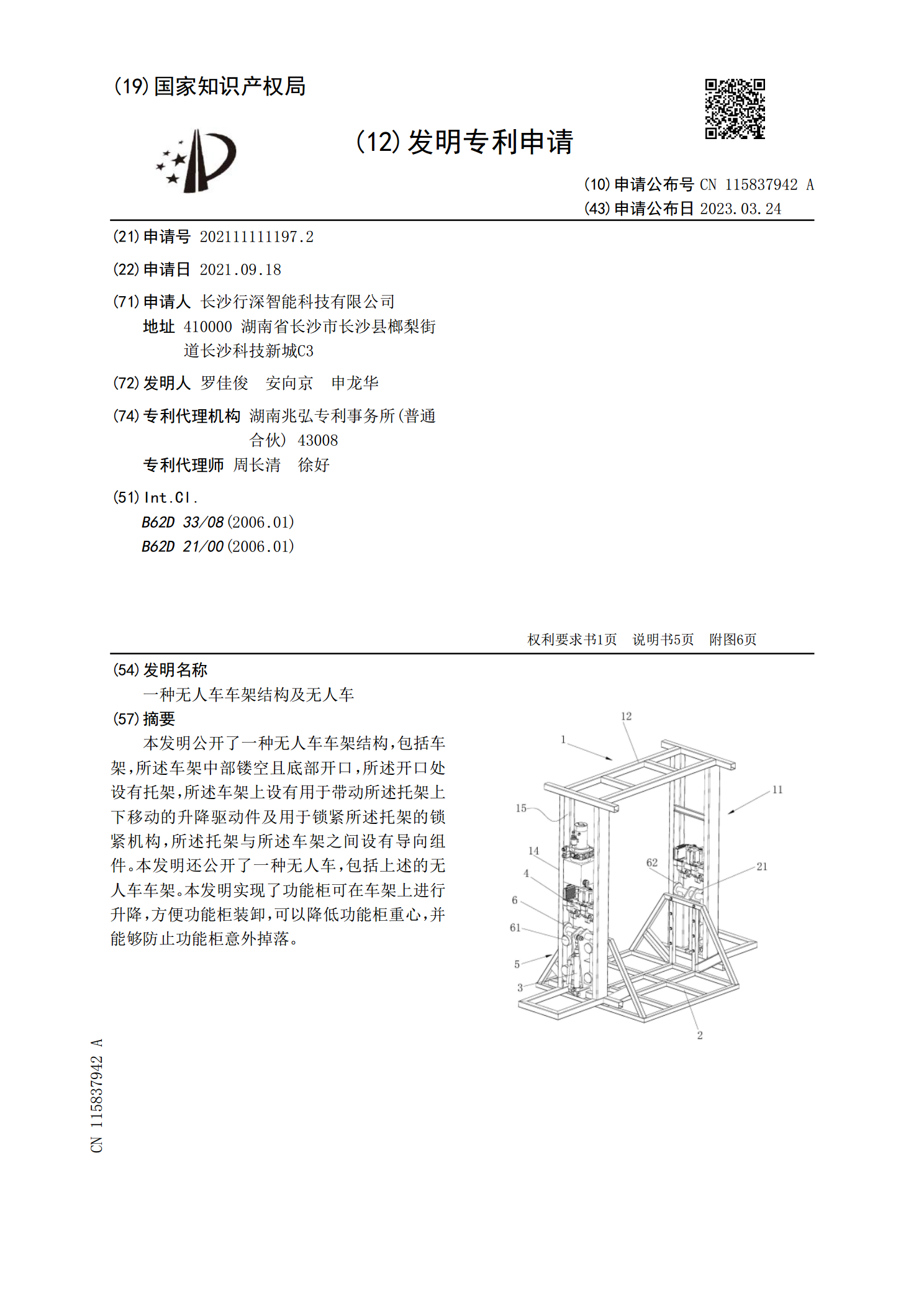
本发明公开了一种无人车车架结构,包括车架,所述车架中部镂空且底部开口,所述开口处设有托架,所述车架上设有用于带动所述托架上下移动的升降驱动件及用于锁紧所述托架的锁紧机构,所述托架与所述车架之间设有导向组件。本发明还公开了一种无人车,包括上述的无人车车架。本发明实现了功能柜可在车架上进行升降,方便功能柜装卸,可以降低功能柜重心,并能够防止功能柜意外掉落。
一种无人车备用控制系统、方法及无人车.pdf
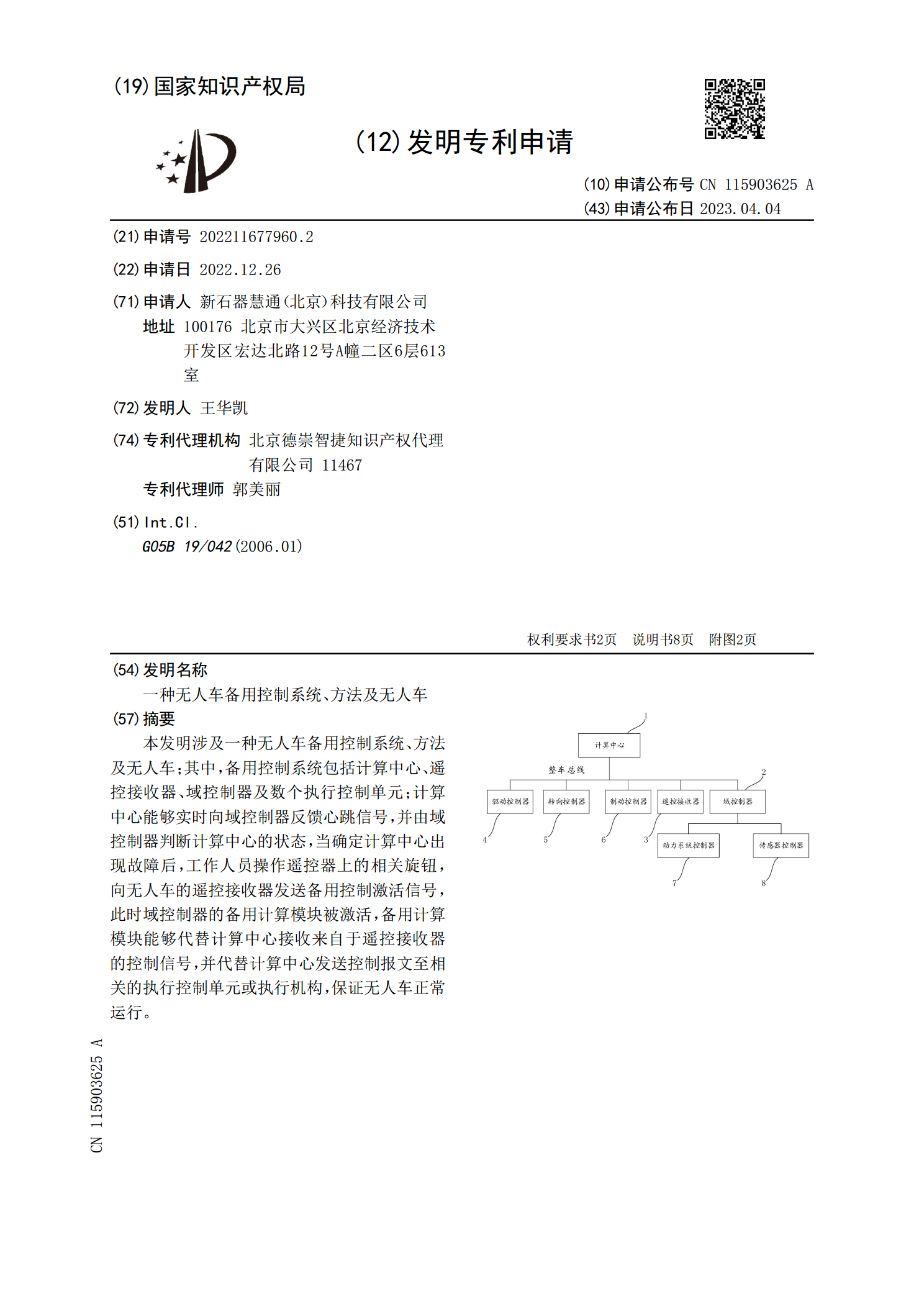
本发明涉及一种无人车备用控制系统、方法及无人车;其中,备用控制系统包括计算中心、遥控接收器、域控制器及数个执行控制单元;计算中心能够实时向域控制器反馈心跳信号,并由域控制器判断计算中心的状态,当确定计算中心出现故障后,工作人员操作遥控器上的相关旋钮,向无人车的遥控接收器发送备用控制激活信号,此时域控制器的备用计算模块被激活,备用计算模块能够代替计算中心接收来自于遥控接收器的控制信号,并代替计算中心发送控制报文至相关的执行控制单元或执行机构,保证无人车正常运行。