
一种机器人用焊枪柔性定位装置及定位方法.pdf

一条****涛k


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人用焊枪柔性定位装置及定位方法.pdf
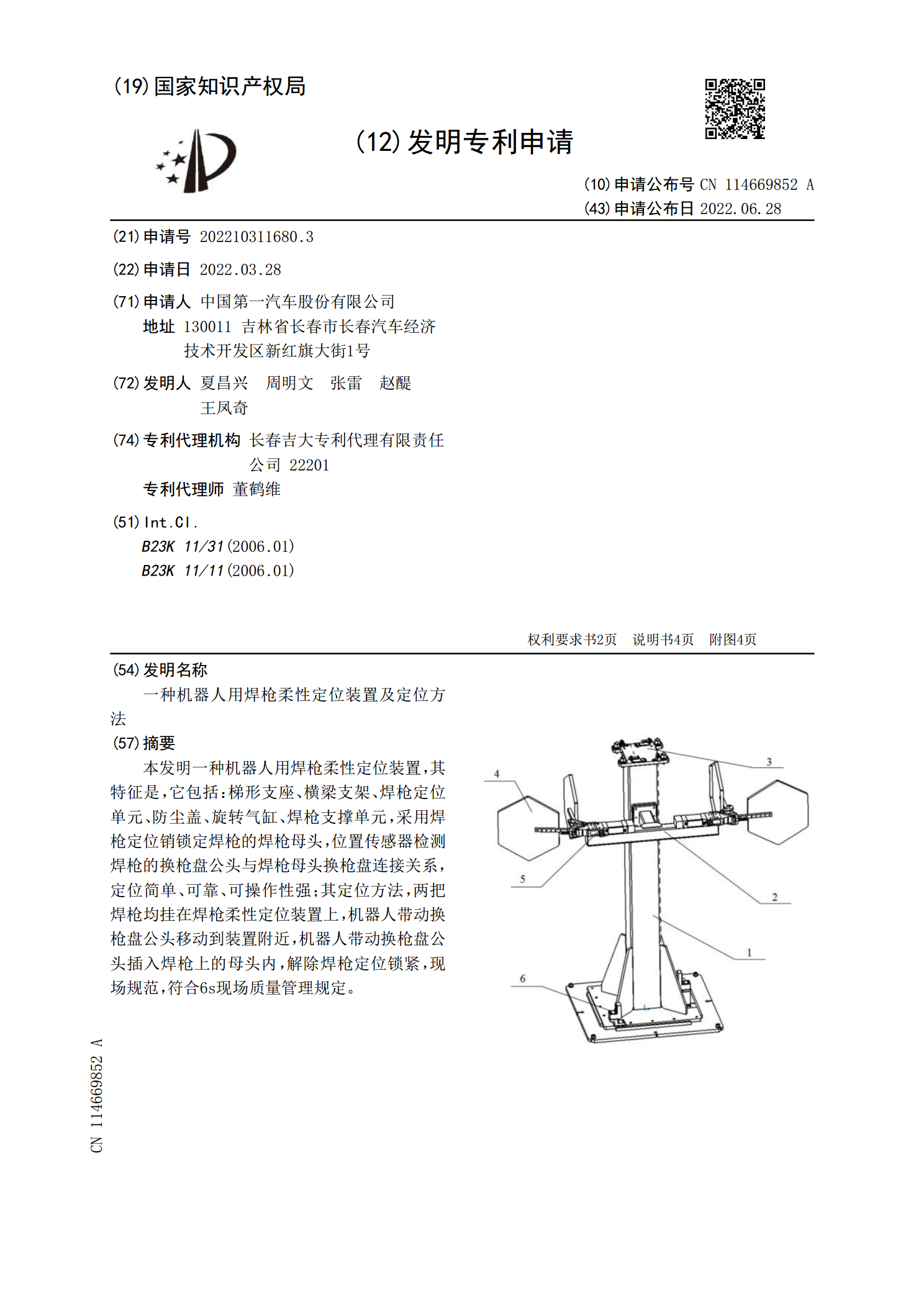
本发明一种机器人用焊枪柔性定位装置,其特征是,它包括:梯形支座、横梁支架、焊枪定位单元、防尘盖、旋转气缸、焊枪支撑单元,采用焊枪定位销锁定焊枪的焊枪母头,位置传感器检测焊枪的换枪盘公头与焊枪母头换枪盘连接关系,定位简单、可靠、可操作性强;其定位方法,两把焊枪均挂在焊枪柔性定位装置上,机器人带动换枪盘公头移动到装置附近,机器人带动换枪盘公头插入焊枪上的母头内,解除焊枪定位锁紧,现场规范,符合6s现场质量管理规定。

一种焊枪定位装置.pdf
本发明属于网片钢筋制备技术领域,公开了一种焊枪定位装置,包括主体机构、连接机构、支撑架、摆动架、第一定位件和第二定位件,连接机构安装于主体机构上,主体机构能够驱动连接机构沿第一方向移动,支撑架安装于连接机构上,连接机构能够驱动支撑架沿第二方向移动,第二方向垂直于第一方向,摆动架转动连接于支撑架,用于安装焊枪,摆动架能够带动焊枪沿第三方向摆动,第三方向垂直于第一方向和第二方向,第一定位件连接于摆动架,能够沿第一方向卡合于网片钢筋的纵筋,第二定位件连接于支撑架,能够沿第二方向抵靠于网片钢筋的横筋。本发明中,焊
一种管道检测用定位装置及定位方法.pdf
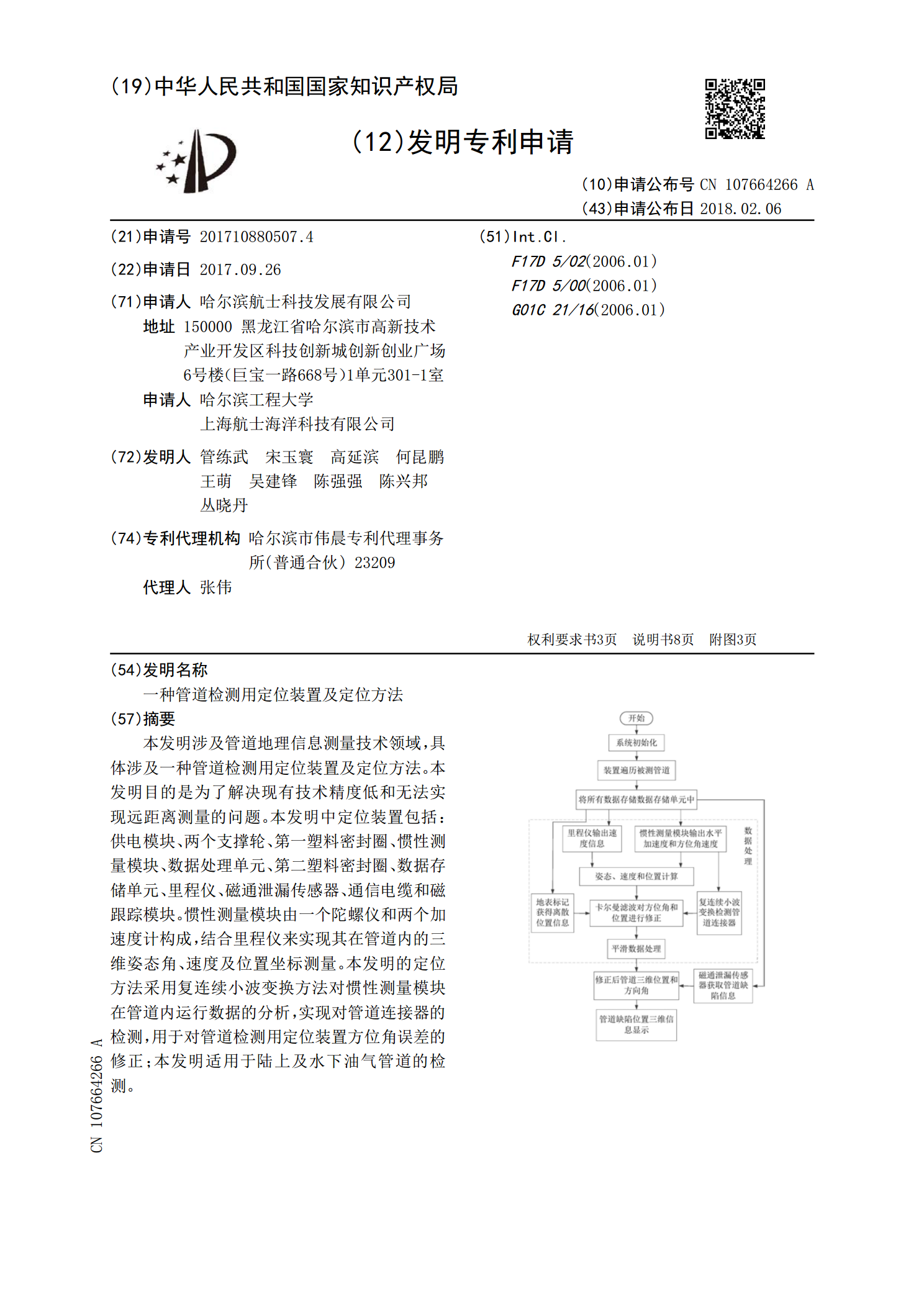
本发明涉及管道地理信息测量技术领域,具体涉及一种管道检测用定位装置及定位方法。本发明目的是为了解决现有技术精度低和无法实现远距离测量的问题。本发明中定位装置包括:供电模块、两个支撑轮、第一塑料密封圈、惯性测量模块、数据处理单元、第二塑料密封圈、数据存储单元、里程仪、磁通泄漏传感器、通信电缆和磁跟踪模块。惯性测量模块由一个陀螺仪和两个加速度计构成,结合里程仪来实现其在管道内的三维姿态角、速度及位置坐标测量。本发明的定位方法采用复连续小波变换方法对惯性测量模块在管道内运行数据的分析,实现对管道连接器的检测,用
一种机器人手臂铸模定位装置及其定位方法.pdf
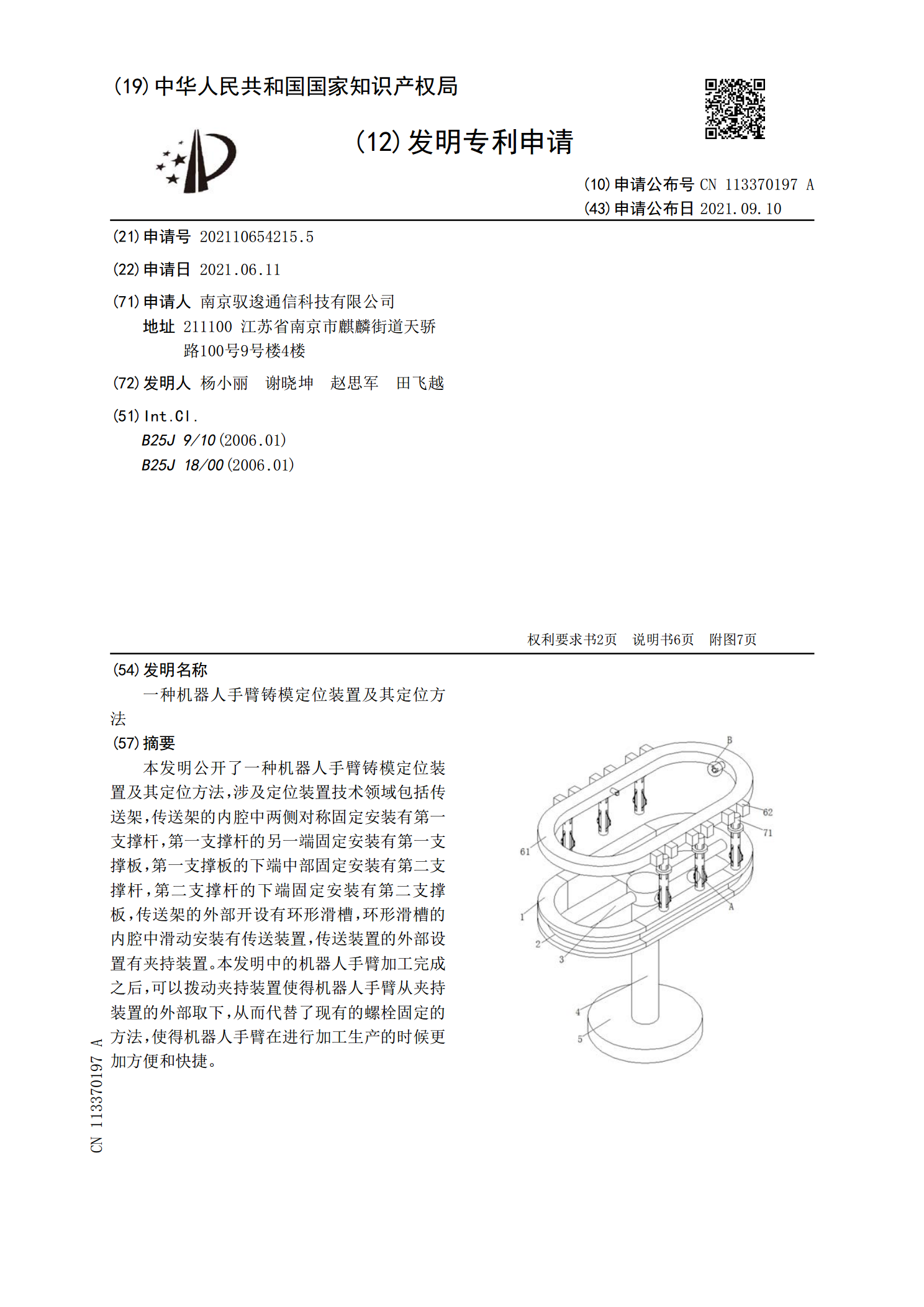
本发明公开了一种机器人手臂铸模定位装置及其定位方法,涉及定位装置技术领域包括传送架,传送架的内腔中两侧对称固定安装有第一支撑杆,第一支撑杆的另一端固定安装有第一支撑板,第一支撑板的下端中部固定安装有第二支撑杆,第二支撑杆的下端固定安装有第二支撑板,传送架的外部开设有环形滑槽,环形滑槽的内腔中滑动安装有传送装置,传送装置的外部设置有夹持装置。本发明中的机器人手臂加工完成之后,可以拨动夹持装置使得机器人手臂从夹持装置的外部取下,从而代替了现有的螺栓固定的方法,使得机器人手臂在进行加工生产的时候更加方便和快捷。

一种机电维修用机电定位装置及定位方法.pdf
本发明公开了一种机电维修用机电定位装置及定位方法,所述机电维修用机电定位装置包括机架、移动机构和定位系统,利用固定组件将被测机构进行固定,并在调整所述被测机构的角度后,通过导轨传输至定位系统;当所述定位系统检测到所述被测机构后,通过丝杆机构驱动限位组件对所述被测机构进行水平定位,并利用弹簧和支撑杆的结合,针对所述被测机构的形状进行精准定位,同时并启动气泵和三爪定位组件对所述被测机构进行垂直定位,实现对所述被测机构上下左右的精准定位,提高定位效果。