
一种机器人手臂铸模定位装置及其定位方法.pdf

永香****能手

1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人手臂铸模定位装置及其定位方法.pdf
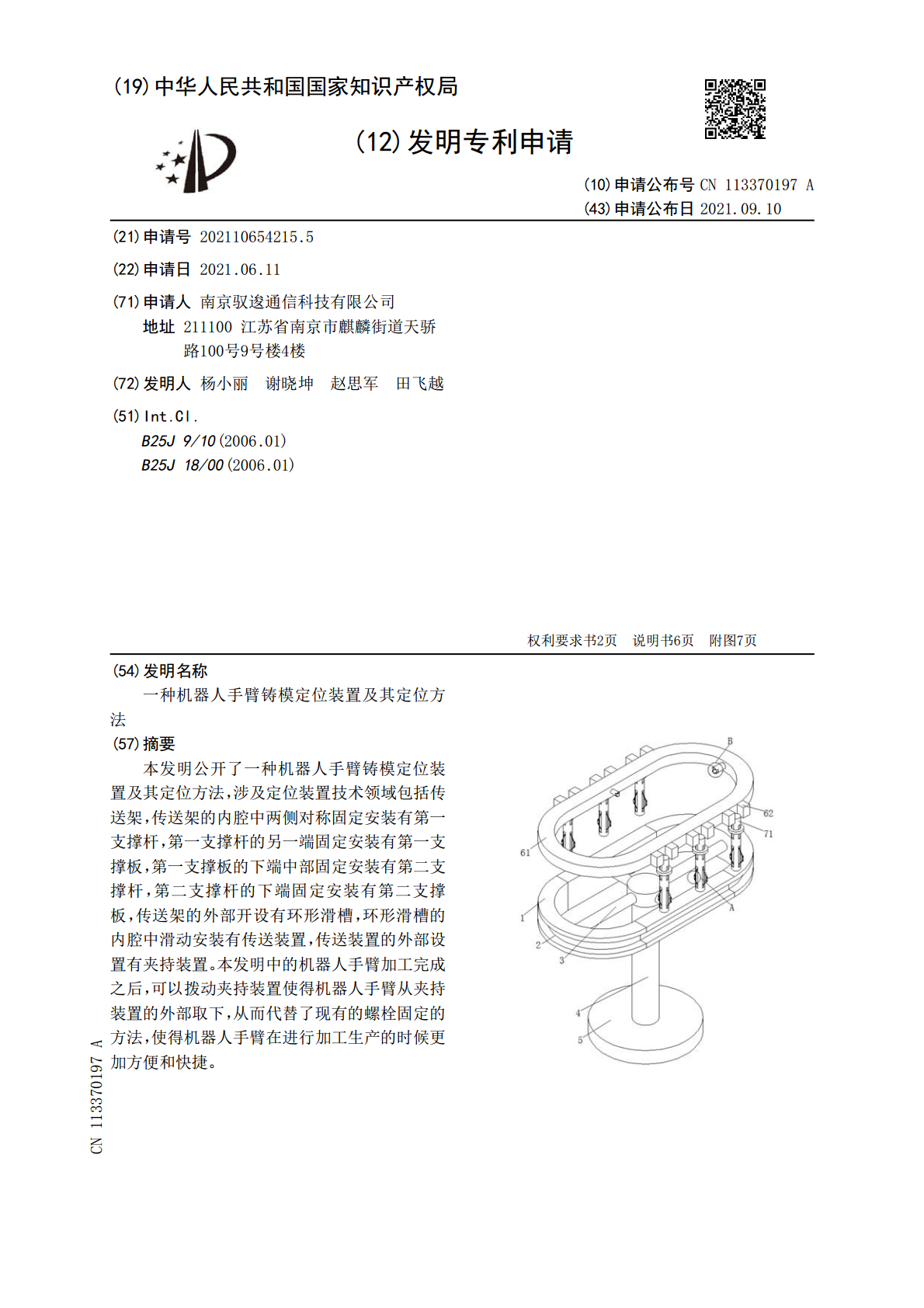
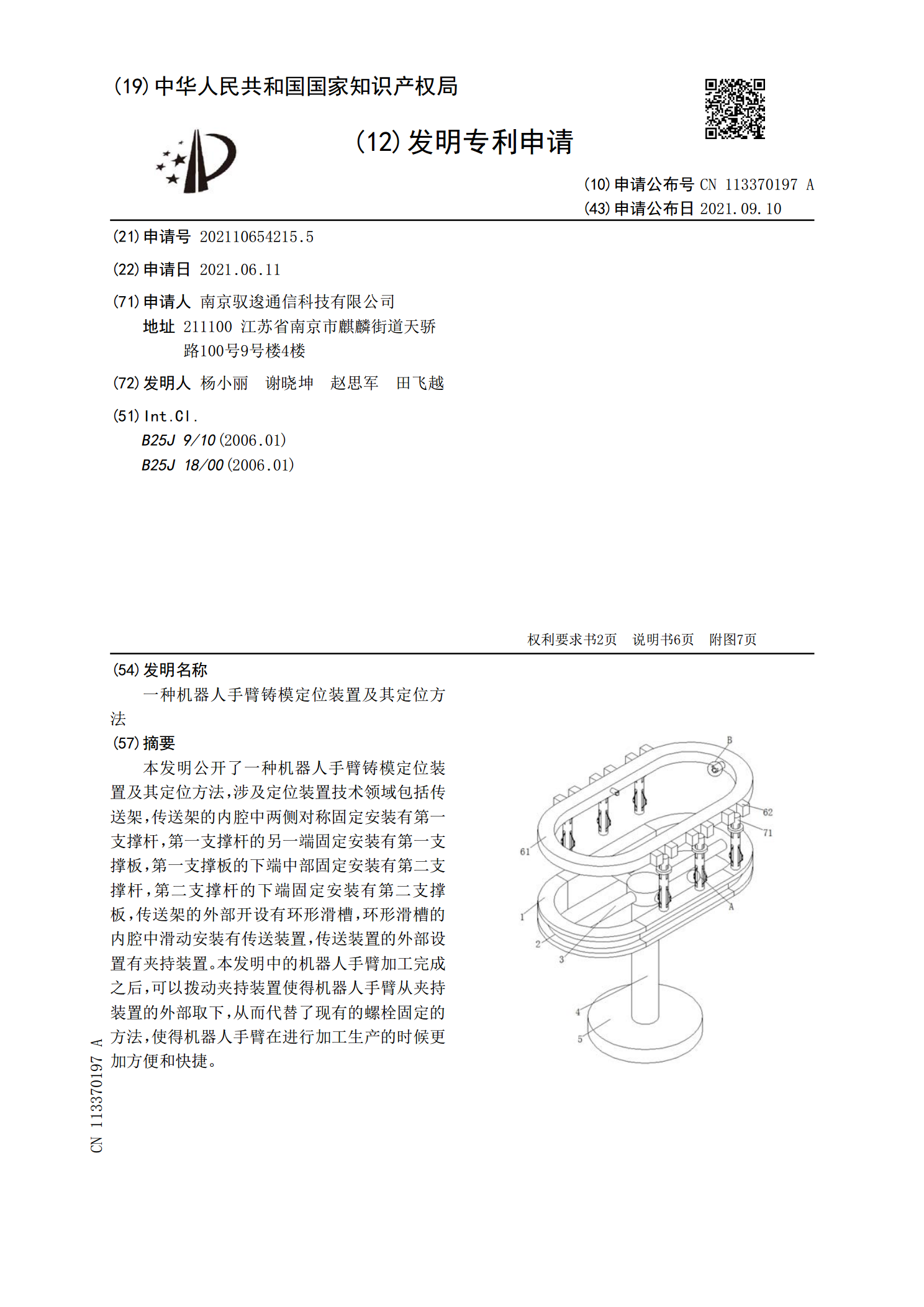
本发明公开了一种机器人手臂铸模定位装置及其定位方法,涉及定位装置技术领域包括传送架,传送架的内腔中两侧对称固定安装有第一支撑杆,第一支撑杆的另一端固定安装有第一支撑板,第一支撑板的下端中部固定安装有第二支撑杆,第二支撑杆的下端固定安装有第二支撑板,传送架的外部开设有环形滑槽,环形滑槽的内腔中滑动安装有传送装置,传送装置的外部设置有夹持装置。本发明中的机器人手臂加工完成之后,可以拨动夹持装置使得机器人手臂从夹持装置的外部取下,从而代替了现有的螺栓固定的方法,使得机器人手臂在进行加工生产的时候更加方便和快捷。
一种水下爬壁机器人定位方法及其定位装置.pdf
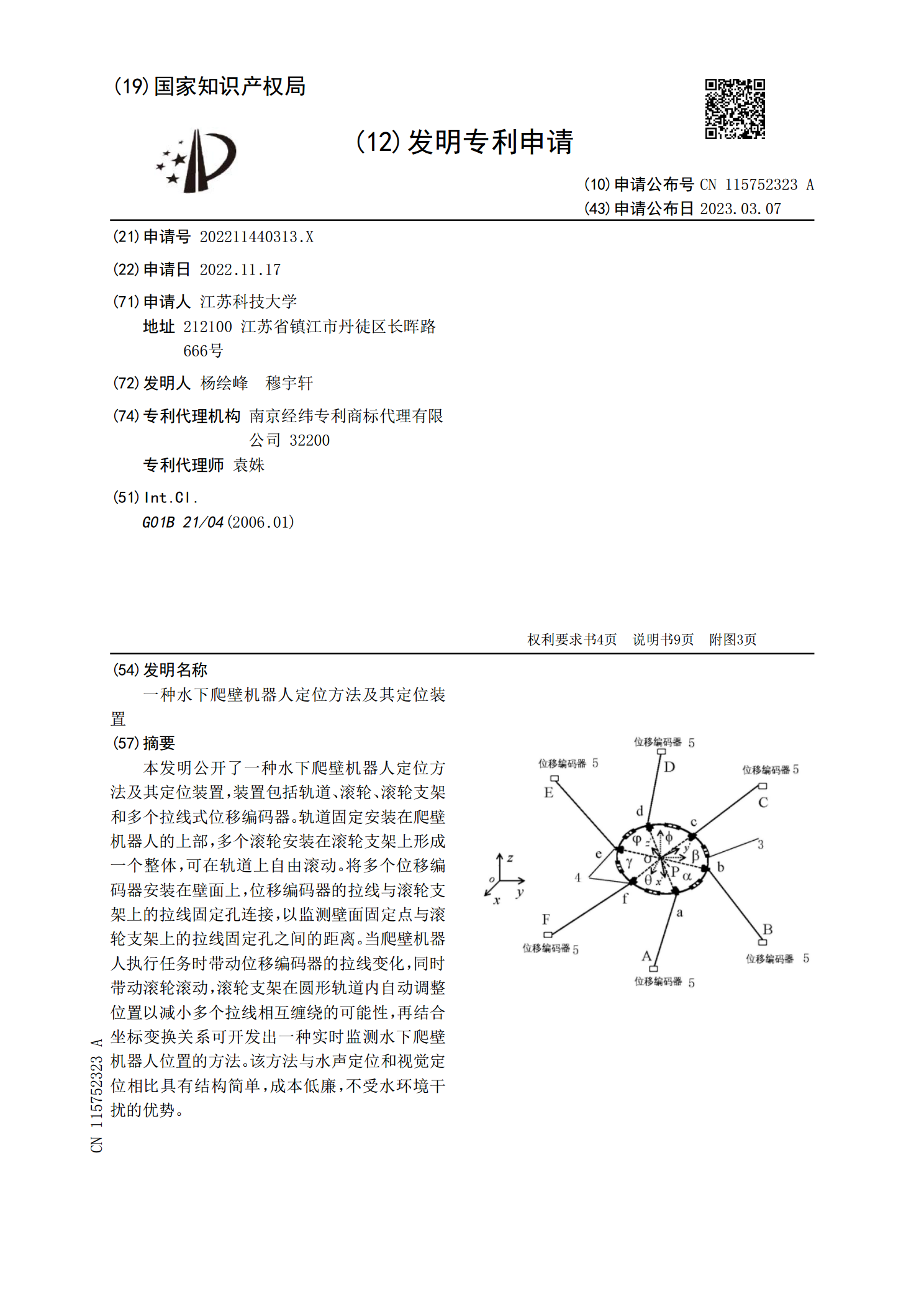
本发明公开了一种水下爬壁机器人定位方法及其定位装置,装置包括轨道、滚轮、滚轮支架和多个拉线式位移编码器。轨道固定安装在爬壁机器人的上部,多个滚轮安装在滚轮支架上形成一个整体,可在轨道上自由滚动。将多个位移编码器安装在壁面上,位移编码器的拉线与滚轮支架上的拉线固定孔连接,以监测壁面固定点与滚轮支架上的拉线固定孔之间的距离。当爬壁机器人执行任务时带动位移编码器的拉线变化,同时带动滚轮滚动,滚轮支架在圆形轨道内自动调整位置以减小多个拉线相互缠绕的可能性,再结合坐标变换关系可开发出一种实时监测水下爬壁机器人位置的
一种定位装置及其定位方法.pdf
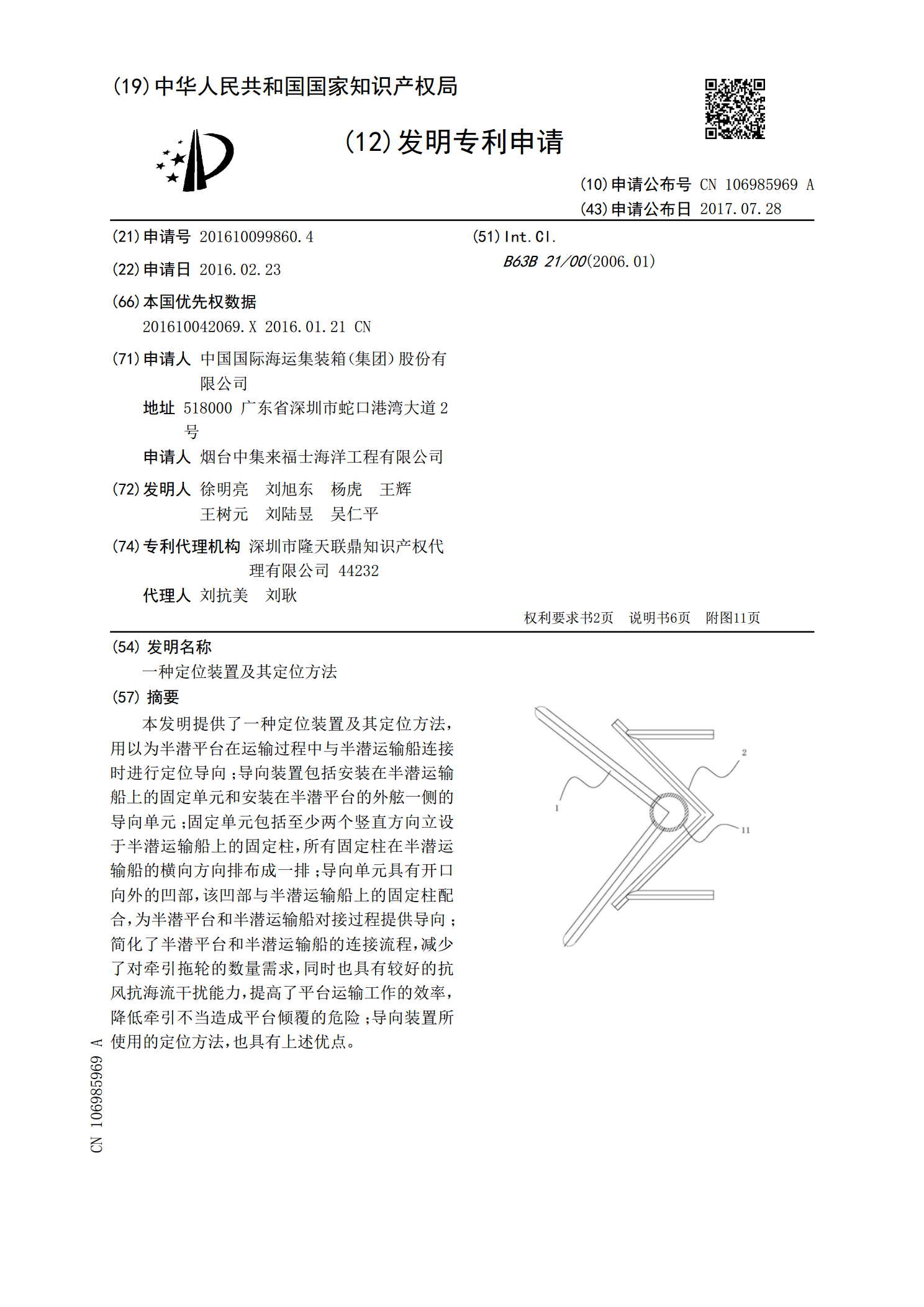
本发明提供了一种定位装置及其定位方法,用以为半潜平台在运输过程中与半潜运输船连接时进行定位导向;导向装置包括安装在半潜运输船上的固定单元和安装在半潜平台的外舷一侧的导向单元;固定单元包括至少两个竖直方向立设于半潜运输船上的固定柱,所有固定柱在半潜运输船的横向方向排布成一排;导向单元具有开口向外的凹部,该凹部与半潜运输船上的固定柱配合,为半潜平台和半潜运输船对接过程提供导向;简化了半潜平台和半潜运输船的连接流程,减少了对牵引拖轮的数量需求,同时也具有较好的抗风抗海流干扰能力,提高了平台运输工作的效率,降低牵
一种定位装置及其定位方法.pdf
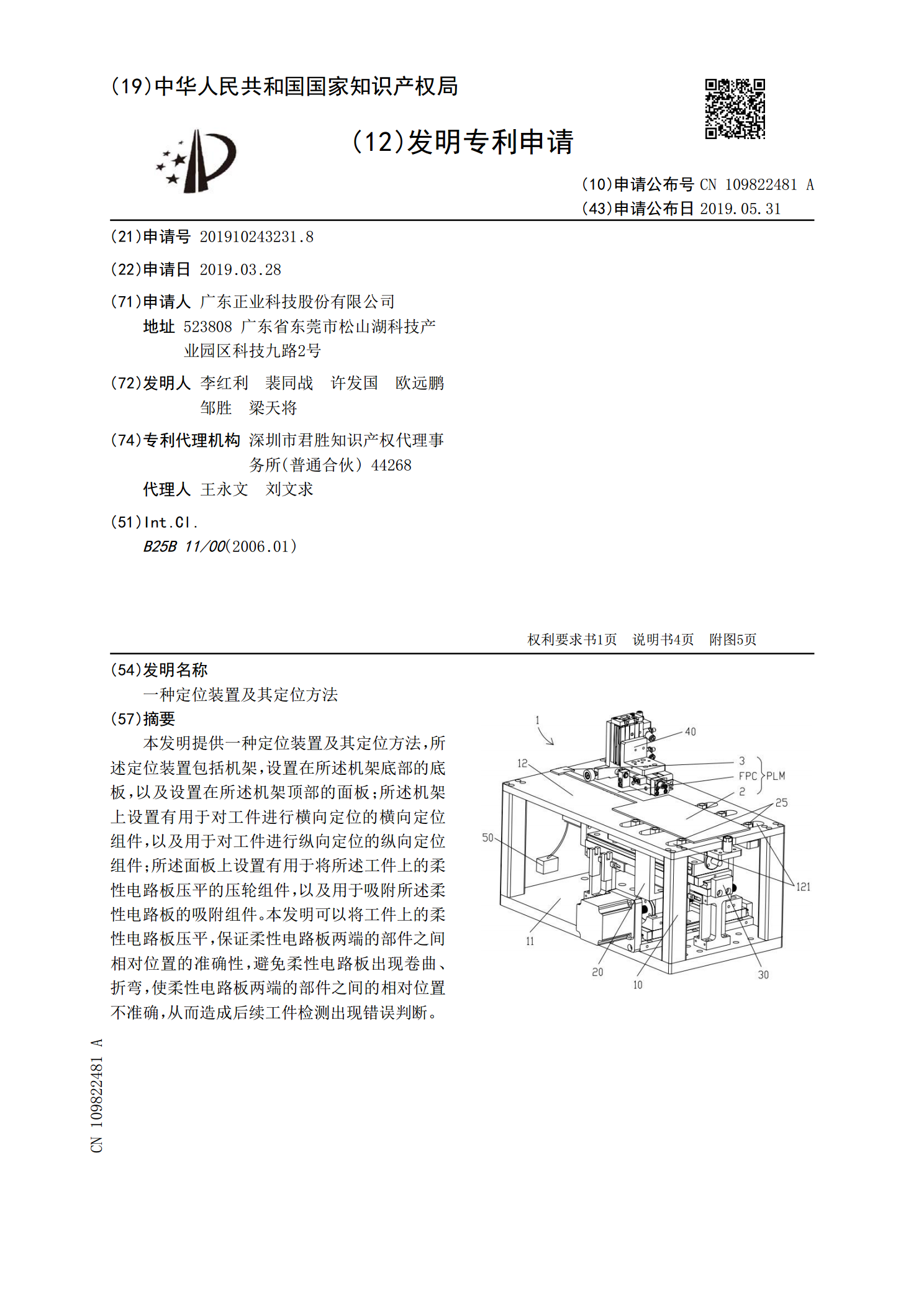
本发明提供一种定位装置及其定位方法,所述定位装置包括机架,设置在所述机架底部的底板,以及设置在所述机架顶部的面板;所述机架上设置有用于对工件进行横向定位的横向定位组件,以及用于对工件进行纵向定位的纵向定位组件;所述面板上设置有用于将所述工件上的柔性电路板压平的压轮组件,以及用于吸附所述柔性电路板的吸附组件。本发明可以将工件上的柔性电路板压平,保证柔性电路板两端的部件之间相对位置的准确性,避免柔性电路板出现卷曲、折弯,使柔性电路板两端的部件之间的相对位置不准确,从而造成后续工件检测出现错误判断。

一种机器人可见光实时定位装置及其定位方法.pdf
本发明涉及便携式照明装置领域,尤其涉及一种机器人可见光实时定位装置及其定位方法,采用单片机简单程序进行运算,不需要特定算法;采用滚轮检测系统,利用简单计数控制可见光频闪频率作为信号媒介,实时监测被测物体的运动轨迹,其精度可控制在较高水平,且系统计算量小;采用TCS230颜色传感器作为信号光频率的检测与输出,使得本发明定位系统的结构装置更加简便,不需要以硅光电池等器件另外搭建检测系统;信号发射模块与信号接收模块采用了起偏器和检偏器,能有效减少环境光对系统的影响。