
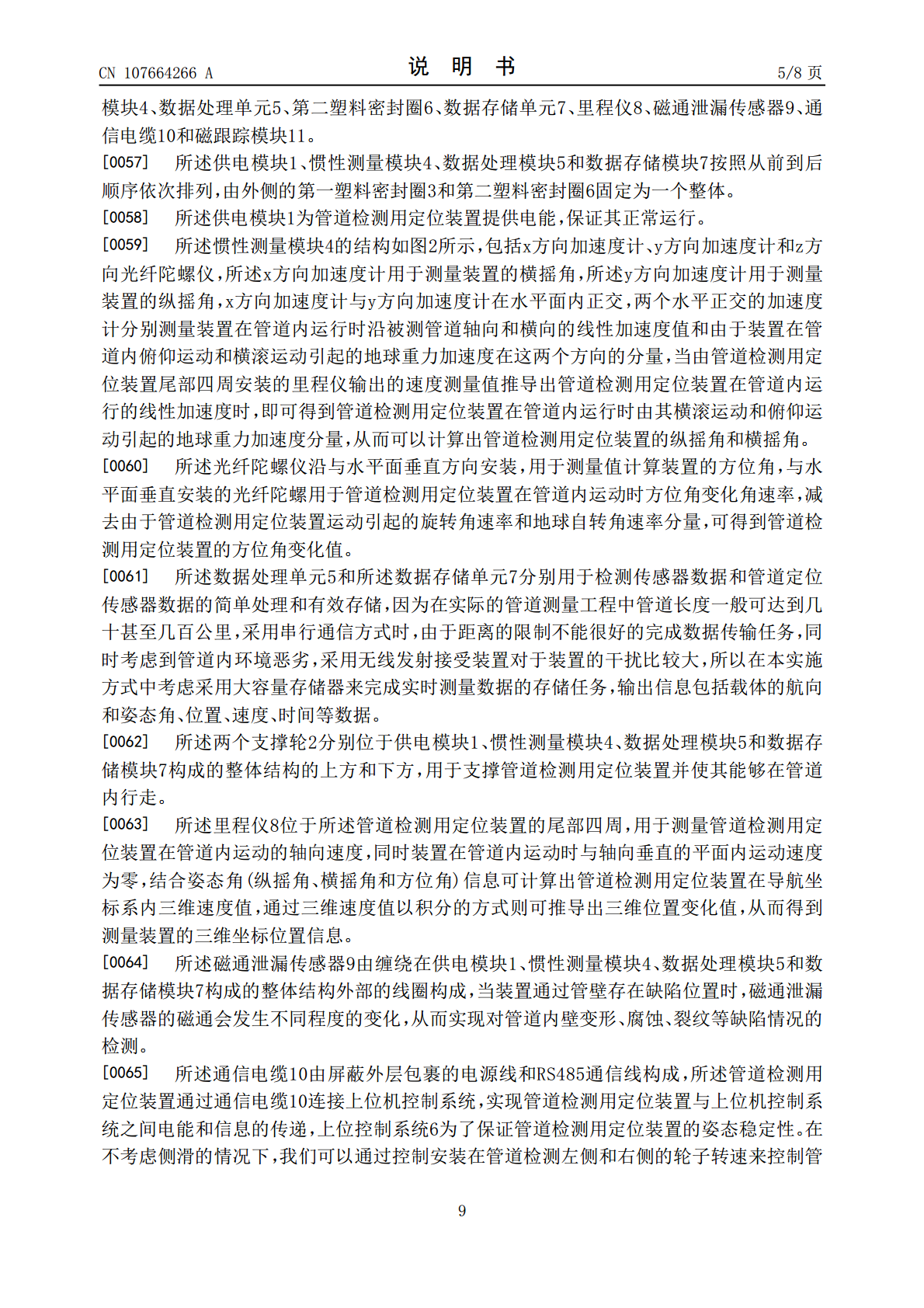
一种管道检测用定位装置及定位方法.pdf

听云****君哇

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种管道检测用定位装置及定位方法.pdf
本发明涉及管道地理信息测量技术领域,具体涉及一种管道检测用定位装置及定位方法。本发明目的是为了解决现有技术精度低和无法实现远距离测量的问题。本发明中定位装置包括:供电模块、两个支撑轮、第一塑料密封圈、惯性测量模块、数据处理单元、第二塑料密封圈、数据存储单元、里程仪、磁通泄漏传感器、通信电缆和磁跟踪模块。惯性测量模块由一个陀螺仪和两个加速度计构成,结合里程仪来实现其在管道内的三维姿态角、速度及位置坐标测量。本发明的定位方法采用复连续小波变换方法对惯性测量模块在管道内运行数据的分析,实现对管道连接器的检测,用
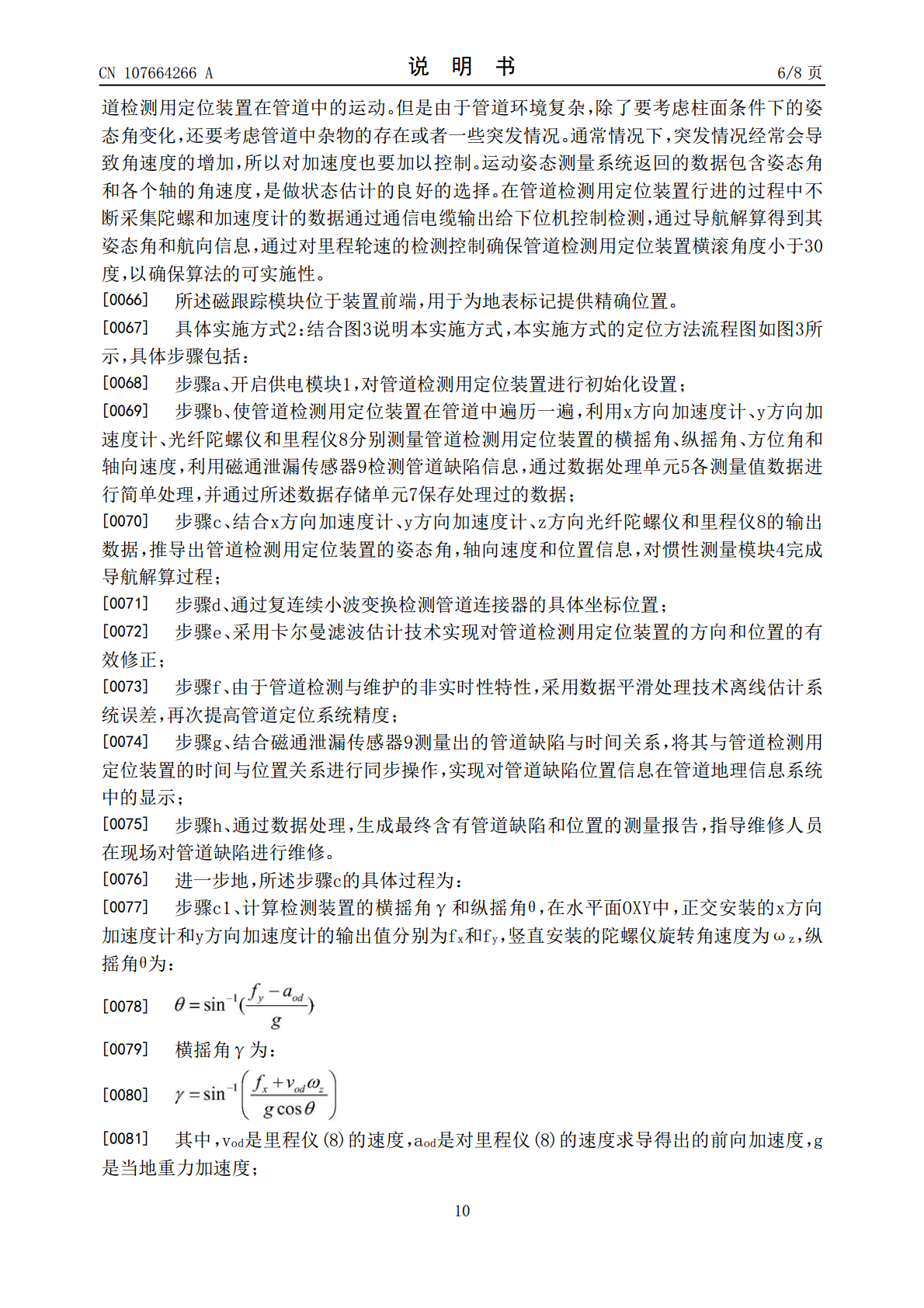
一种市政管道快速定位钻进装置及定位方法.pdf
本发明涉及定位钻进技术领域,且公开了一种市政管道快速定位钻进装置及定位方法,该装置包括底板、钻杆、钻头和定位管,定位管设置于底板的上侧,底板的上表面和定位管的两侧之间设置有角度调节机构,定位管通过角度调节机构与底板限位连接,钻杆设置于定位管的内侧,钻杆的下端延伸至底板的下侧,钻头固定安装于钻杆的下端,定位管的两侧从上至下依次活动穿设有多个滑杆,多个滑杆的内侧均固定设置有第一弧形板,多个第一弧形板的内侧均与钻杆相接触,定位管的两侧均设置有竖板。本发明通过角度调节机构和定位管相配合,能够对钻杆和钻头进行快速定
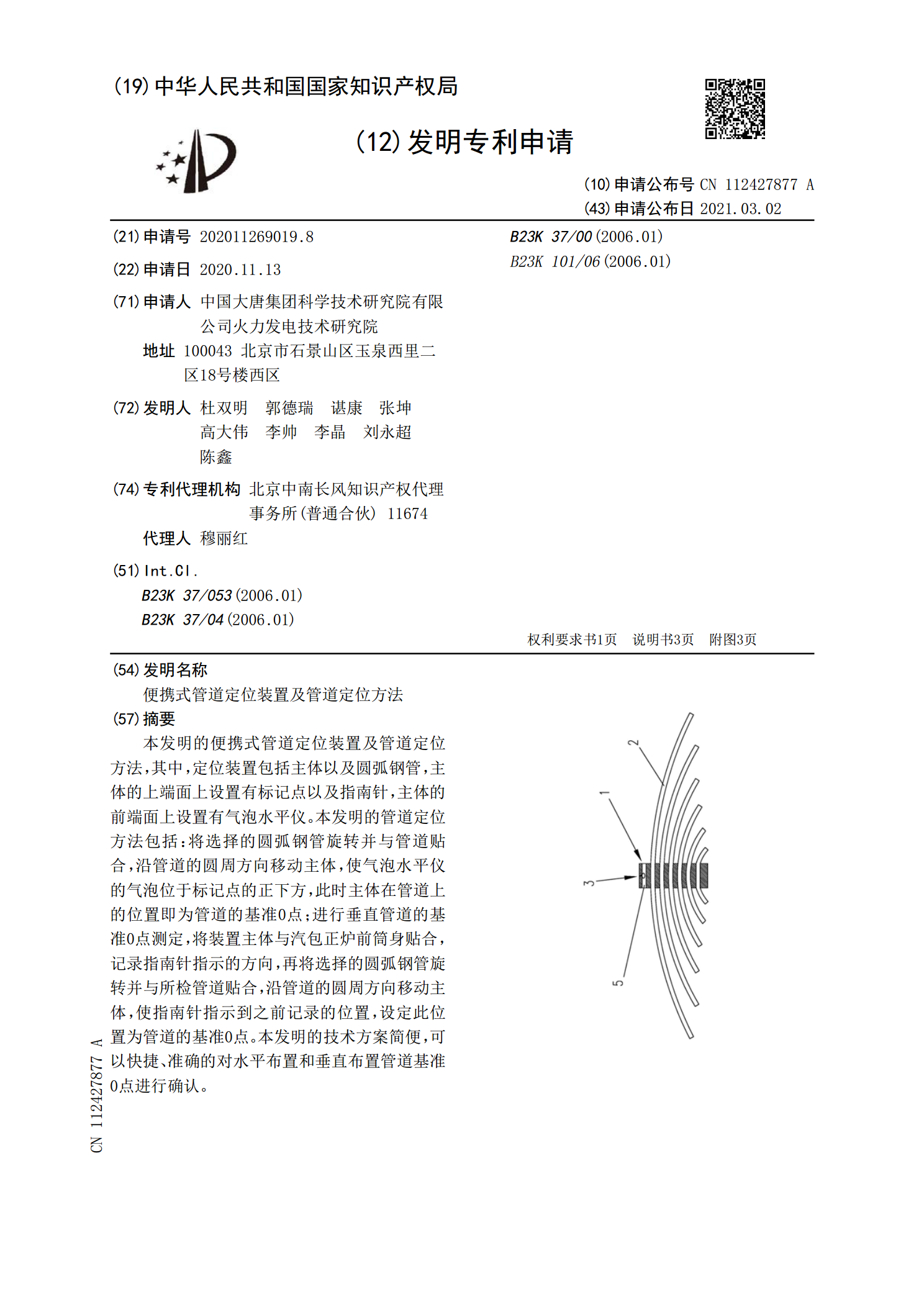
便携式管道定位装置及管道定位方法.pdf
本发明的便携式管道定位装置及管道定位方法,其中,定位装置包括主体以及圆弧钢管,主体的上端面上设置有标记点以及指南针,主体的前端面上设置有气泡水平仪。本发明的管道定位方法包括:将选择的圆弧钢管旋转并与管道贴合,沿管道的圆周方向移动主体,使气泡水平仪的气泡位于标记点的正下方,此时主体在管道上的位置即为管道的基准0点;进行垂直管道的基准0点测定,将装置主体与汽包正炉前筒身贴合,记录指南针指示的方向,再将选择的圆弧钢管旋转并与所检管道贴合,沿管道的圆周方向移动主体,使指南针指示到之前记录的位置,设定此位置为管道的
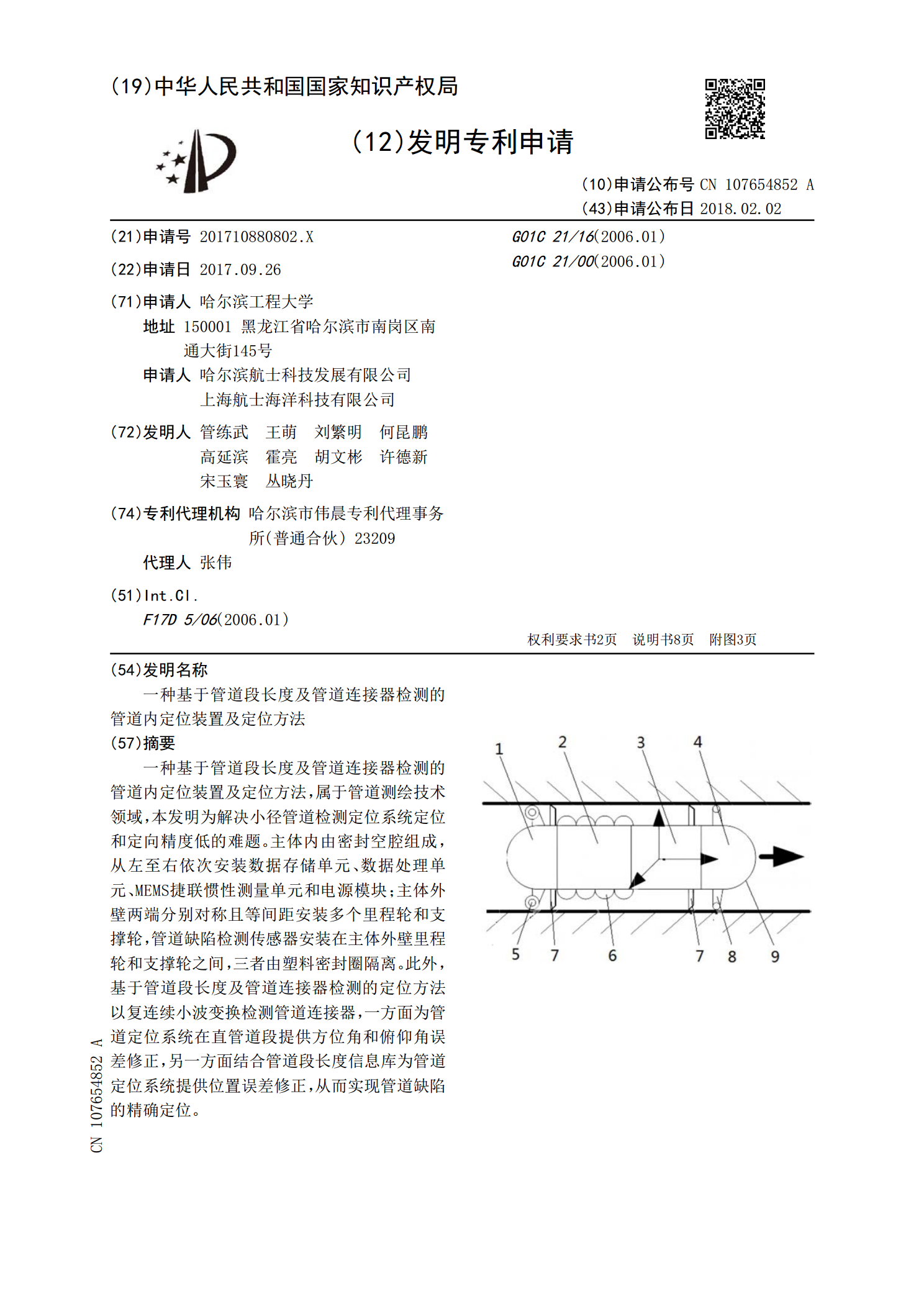
一种基于管道段长度及管道连接器检测的管道内定位装置及定位方法.pdf
一种基于管道段长度及管道连接器检测的管道内定位装置及定位方法,属于管道测绘技术领域,本发明为解决小径管道检测定位系统定位和定向精度低的难题。主体内由密封空腔组成,从左至右依次安装数据存储单元、数据处理单元、MEMS捷联惯性测量单元和电源模块;主体外壁两端分别对称且等间距安装多个里程轮和支撑轮,管道缺陷检测传感器安装在主体外壁里程轮和支撑轮之间,三者由塑料密封圈隔离。此外,基于管道段长度及管道连接器检测的定位方法以复连续小波变换检测管道连接器,一方面为管道定位系统在直管道段提供方位角和俯仰角误差修正,另一方
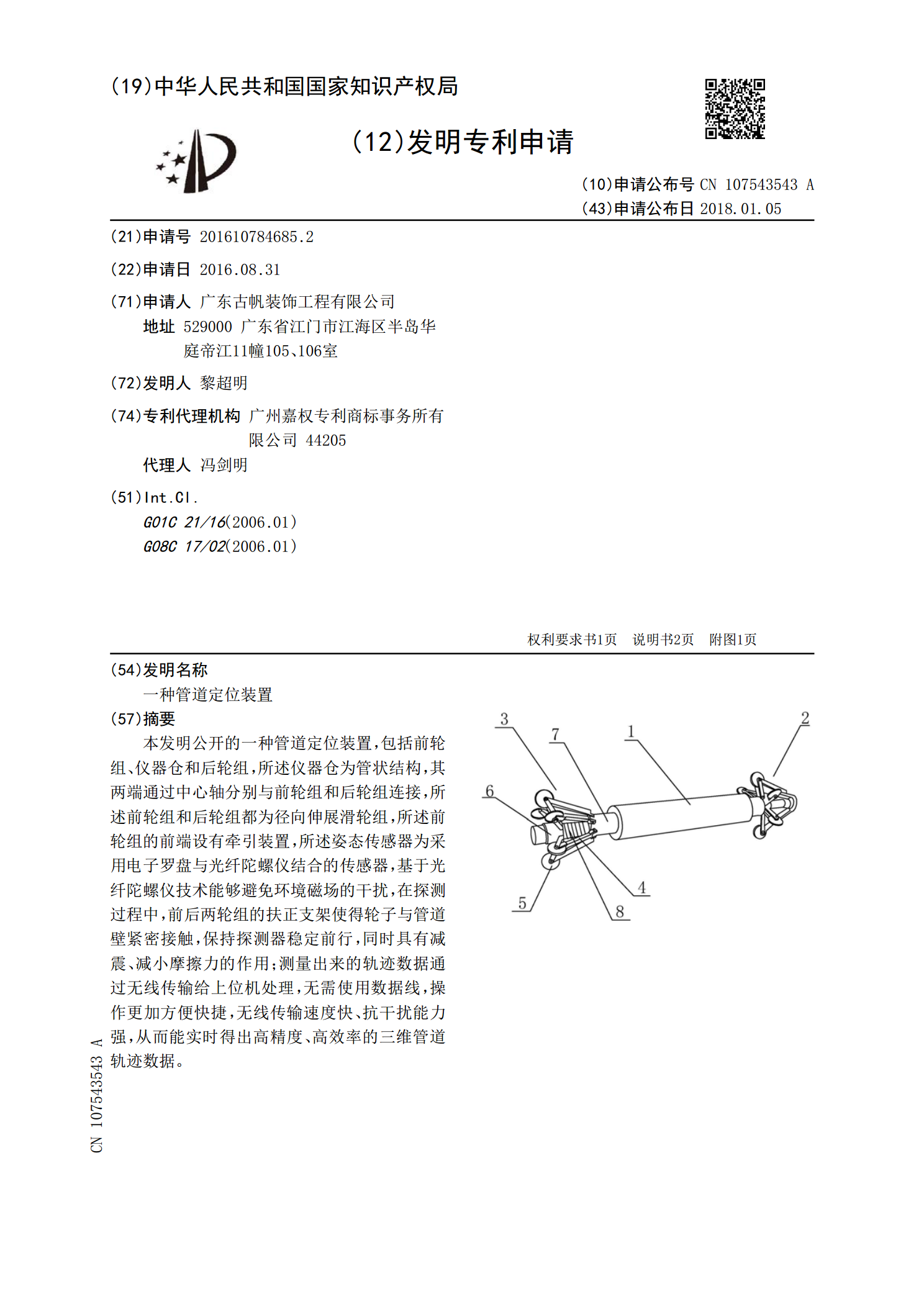
一种管道定位装置.pdf
本发明公开的一种管道定位装置,包括前轮组、仪器仓和后轮组,所述仪器仓为管状结构,其两端通过中心轴分别与前轮组和后轮组连接,所述前轮组和后轮组都为径向伸展滑轮组,所述前轮组的前端设有牵引装置,所述姿态传感器为采用电子罗盘与光纤陀螺仪结合的传感器,基于光纤陀螺仪技术能够避免环境磁场的干扰,在探测过程中,前后两轮组的扶正支架使得轮子与管道壁紧密接触,保持探测器稳定前行,同时具有减震、减小摩擦力的作用;测量出来的轨迹数据通过无线传输给上位机处理,无需使用数据线,操作更加方便快捷,无线传输速度快、抗干扰能力强,从而