
灌溉机器人全覆盖路径规划方法.docx

豆柴****作者


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

灌溉机器人全覆盖路径规划方法.docx
灌溉机器人全覆盖路径规划方法1.内容概要介绍了灌溉机器人在现代农业中的应用背景和重要意义,以及目前国内外研究现状和存在的问题。针对现有技术在灌溉机器人路径规划方面的不足,提出了本研究的目的和意义。简要介绍了常用的路径规划算法(如Dijkstra算法、A算法等),并与本研究所使用的全覆盖路径规划方法进行了对比分析。对覆盖区域的概念、计算方法以及基于覆盖区域的路径规划方法进行了阐述。详细介绍了本研究所提出的全覆盖路径规划方法,包括以下几个关键步骤:利用已有的路径规划算法或提出新的算法,为机器人生成全覆盖的路径

清洁机器人全覆盖实时路径规划方法及装置.pdf
本公开提供清洁机器人全覆盖实时路径规划方法,包括:将清洁机器人工作场景划分为多个子地图区域,并对各个子地图区域进行初始化;选择各个子地图区域中的一个作为起始子地图区域;对起始子地图区域沿边清洁,通过沿边清洁以完成对子地图区域轮廓的闭环检测;在起始子地图区域内部进行折线清洁,并实时更新起始子地图区域内像素点的清洁状态;分别对起始子地图区域以外的各个子地图区域沿边清洁并折线清洁。本公开还提供了一种清洁机器人全覆盖实时路径规划装置、电子设备以及可读存储介质。

一种移动机器人的全覆盖路径规划方法.pdf
本发明提供了一种移动机器人的全覆盖路径规划方法,该方法通过解决优化分割覆盖及这个过程中的路径规划问题实现的新的覆盖算法,该算法不需要预先知道地图空间环境,在覆盖的同时进行区域划分,并且这个过程是增量式覆盖,实现动态覆盖划分,并且可对动态出现的障碍物做实时选择规划,从而实现避障完成覆盖的双重任务。该方法不仅可以运用于拓扑环境规则的地图环境,而且同样适用于复杂区域环境空间,相比于牛耕分割算法更具优势。
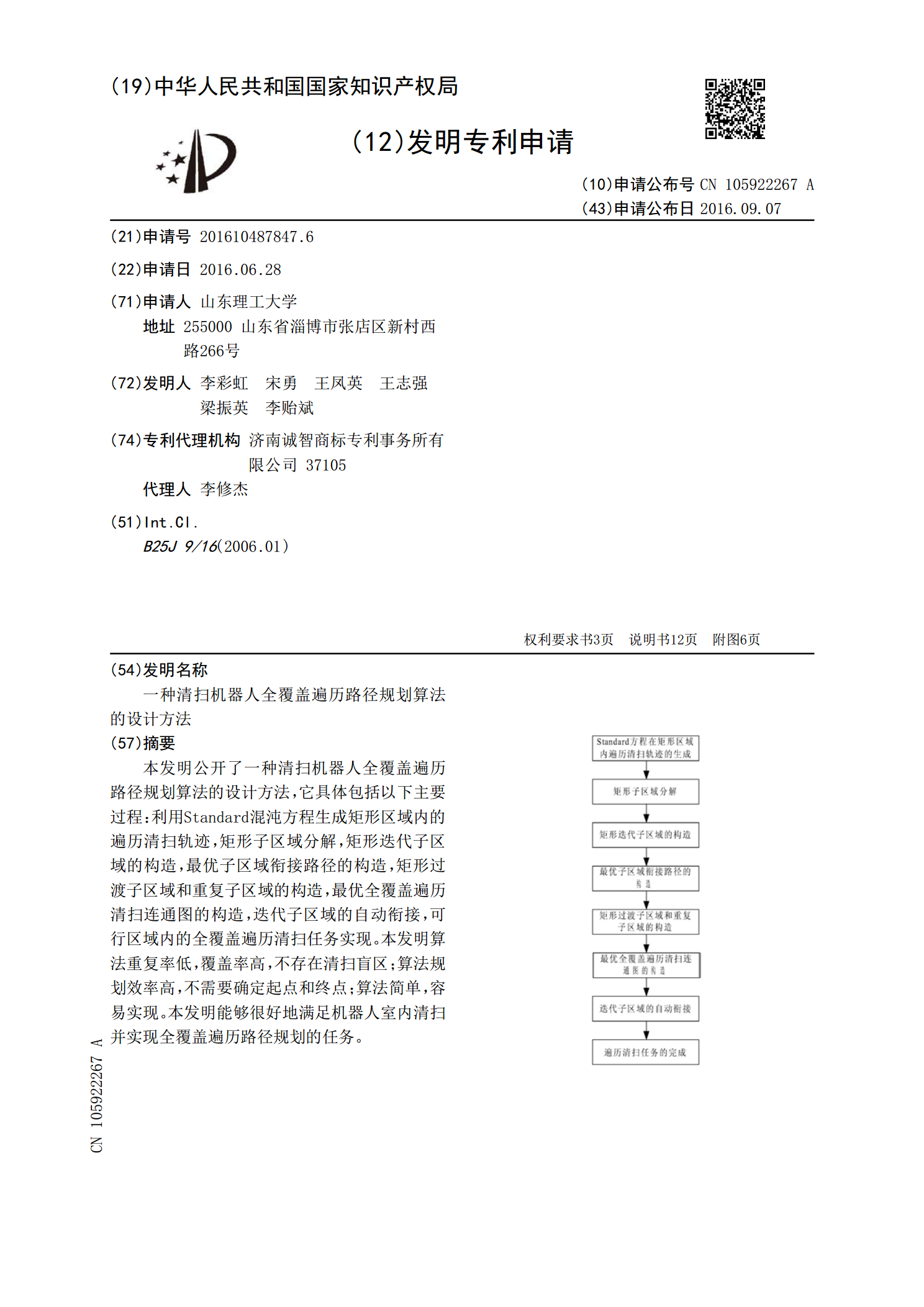
一种清扫机器人全覆盖遍历路径规划算法的设计方法.pdf
本发明公开了一种清扫机器人全覆盖遍历路径规划算法的设计方法,它具体包括以下主要过程:利用Standard混沌方程生成矩形区域内的遍历清扫轨迹,矩形子区域分解,矩形迭代子区域的构造,最优子区域衔接路径的构造,矩形过渡子区域和重复子区域的构造,最优全覆盖遍历清扫连通图的构造,迭代子区域的自动衔接,可行区域内的全覆盖遍历清扫任务实现。本发明算法重复率低,覆盖率高,不存在清扫盲区;算法规划效率高,不需要确定起点和终点;算法简单,容易实现。本发明能够很好地满足机器人室内清扫并实现全覆盖遍历路径规划的任务。
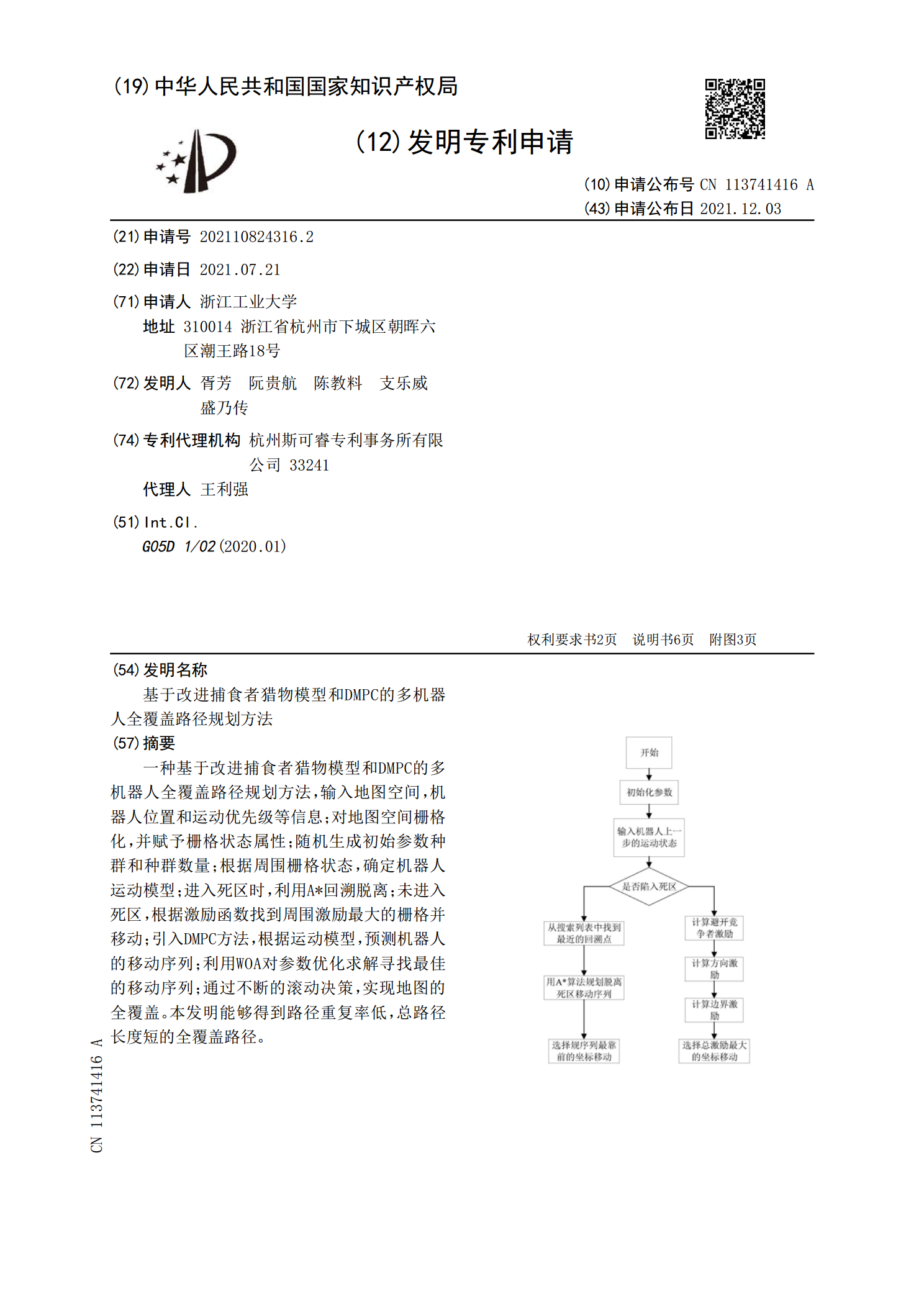
基于改进捕食者猎物模型和DMPC的多机器人全覆盖路径规划方法.pdf
一种基于改进捕食者猎物模型和DMPC的多机器人全覆盖路径规划方法,输入地图空间,机器人位置和运动优先级等信息;对地图空间栅格化,并赋予栅格状态属性;随机生成初始参数种群和种群数量;根据周围栅格状态,确定机器人运动模型;进入死区时,利用A*回溯脱离;未进入死区,根据激励函数找到周围激励最大的栅格并移动;引入DMPC方法,根据运动模型,预测机器人的移动序列;利用WOA对参数优化求解寻找最佳的移动序列;通过不断的滚动决策,实现地图的全覆盖。本发明能够得到路径重复率低,总路径长度短的全覆盖路径。