
一种清扫机器人全覆盖遍历路径规划算法的设计方法.pdf

mm****酱吖

1/10
2/10
3/10
4/10
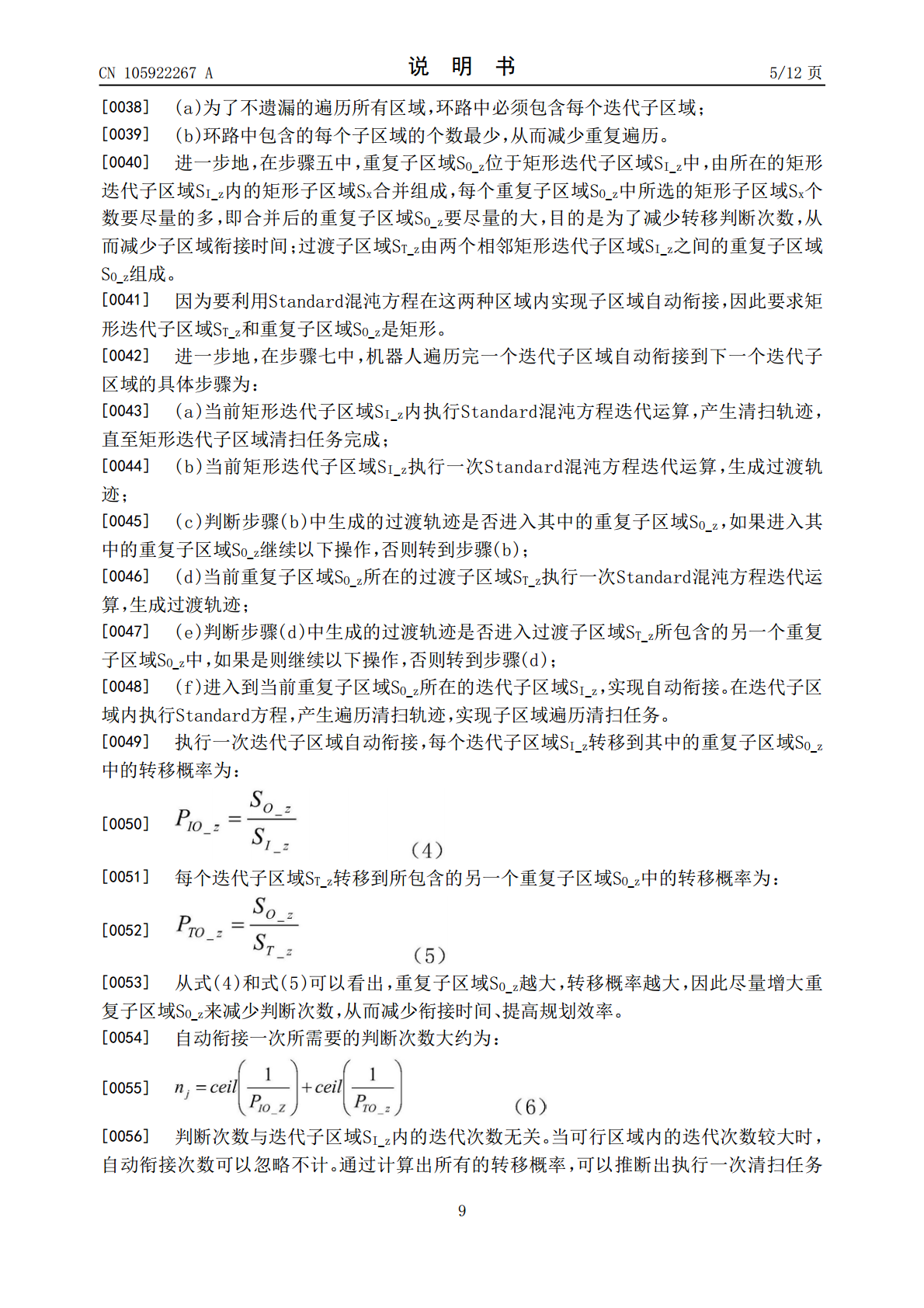
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种清扫机器人全覆盖遍历路径规划算法的设计方法.pdf
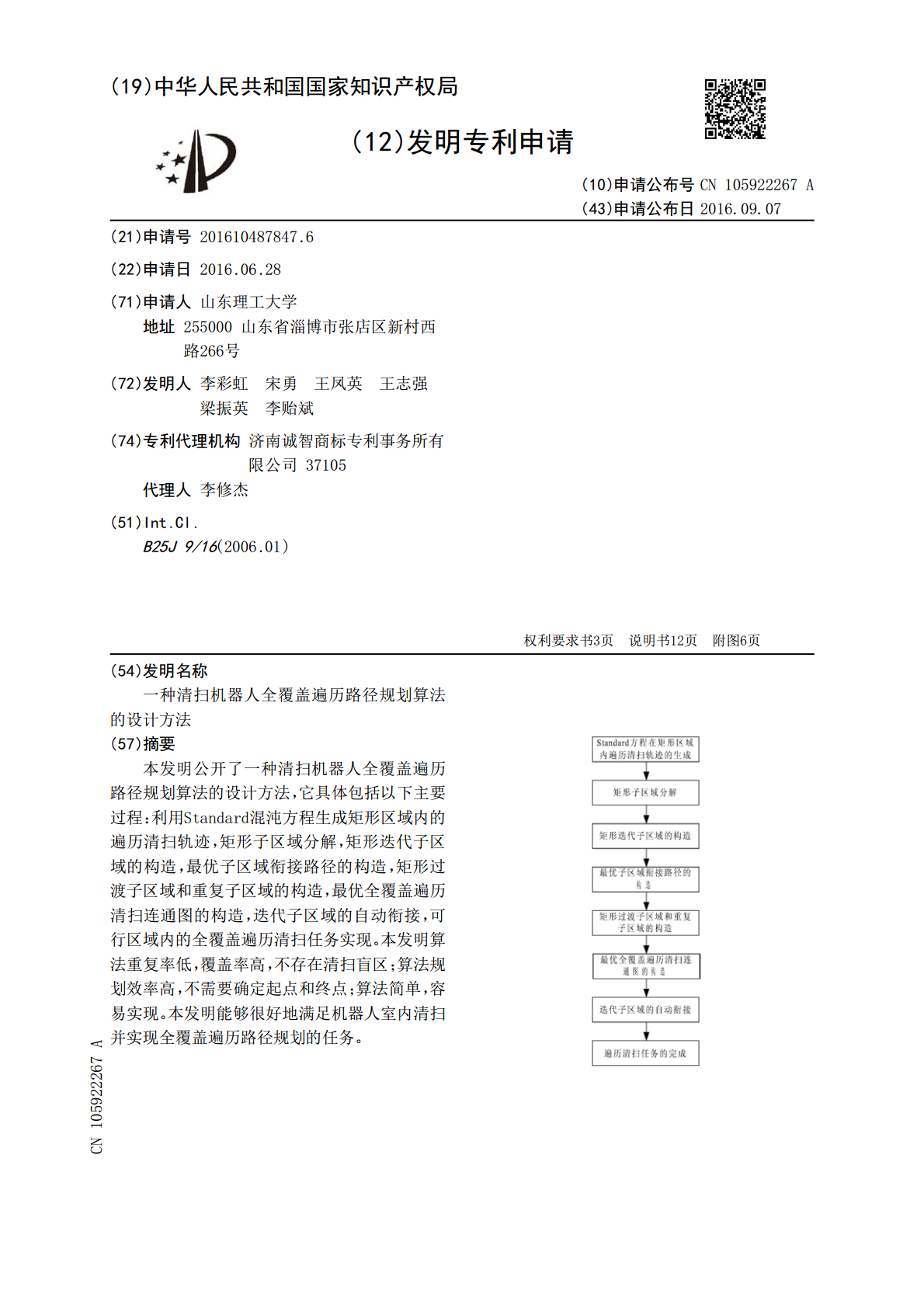
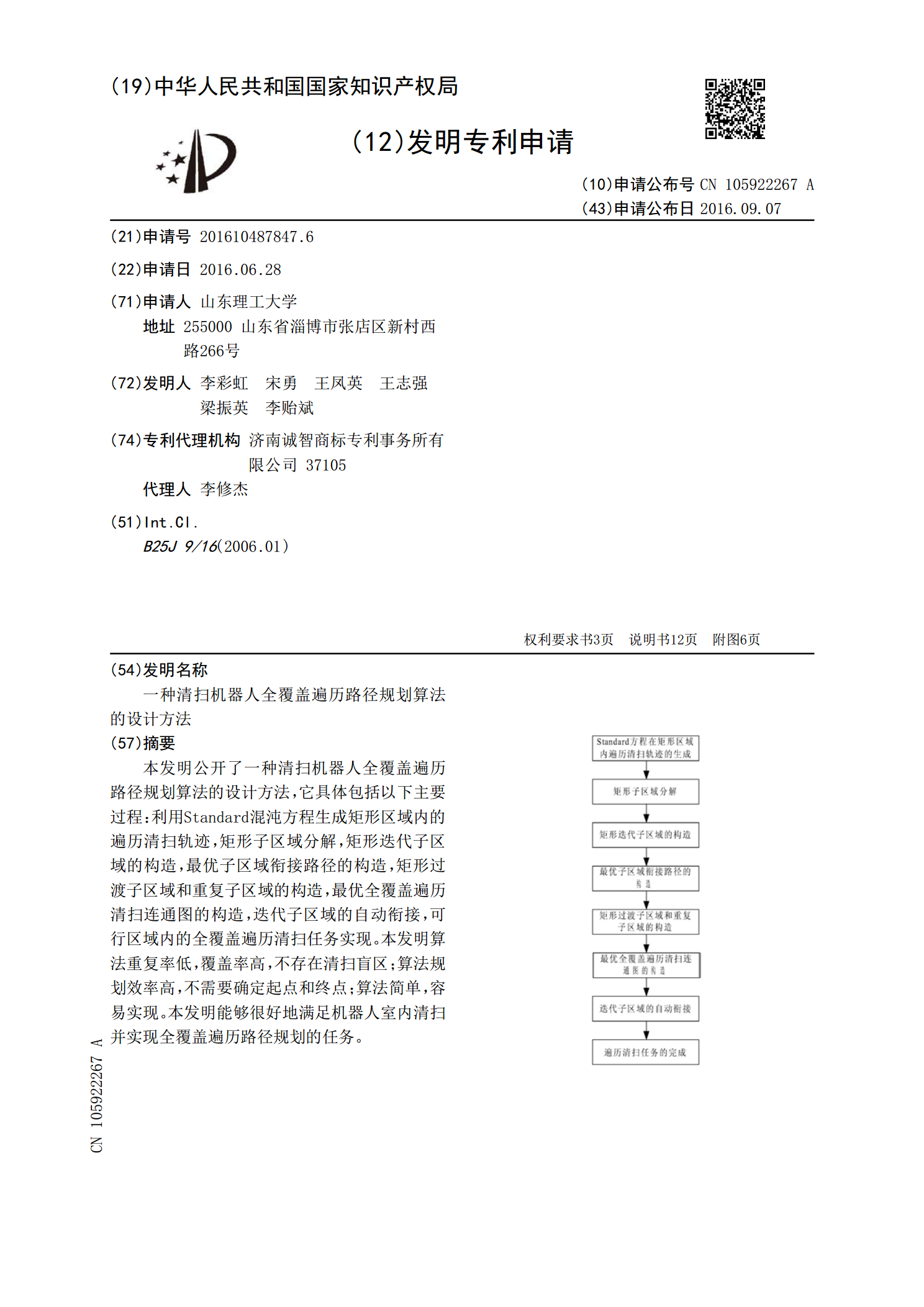
本发明公开了一种清扫机器人全覆盖遍历路径规划算法的设计方法,它具体包括以下主要过程:利用Standard混沌方程生成矩形区域内的遍历清扫轨迹,矩形子区域分解,矩形迭代子区域的构造,最优子区域衔接路径的构造,矩形过渡子区域和重复子区域的构造,最优全覆盖遍历清扫连通图的构造,迭代子区域的自动衔接,可行区域内的全覆盖遍历清扫任务实现。本发明算法重复率低,覆盖率高,不存在清扫盲区;算法规划效率高,不需要确定起点和终点;算法简单,容易实现。本发明能够很好地满足机器人室内清扫并实现全覆盖遍历路径规划的任务。

灌溉机器人全覆盖路径规划方法.docx
灌溉机器人全覆盖路径规划方法1.内容概要介绍了灌溉机器人在现代农业中的应用背景和重要意义,以及目前国内外研究现状和存在的问题。针对现有技术在灌溉机器人路径规划方面的不足,提出了本研究的目的和意义。简要介绍了常用的路径规划算法(如Dijkstra算法、A算法等),并与本研究所使用的全覆盖路径规划方法进行了对比分析。对覆盖区域的概念、计算方法以及基于覆盖区域的路径规划方法进行了阐述。详细介绍了本研究所提出的全覆盖路径规划方法,包括以下几个关键步骤:利用已有的路径规划算法或提出新的算法,为机器人生成全覆盖的路径
管道机器人的遍历路径规划方法.pdf
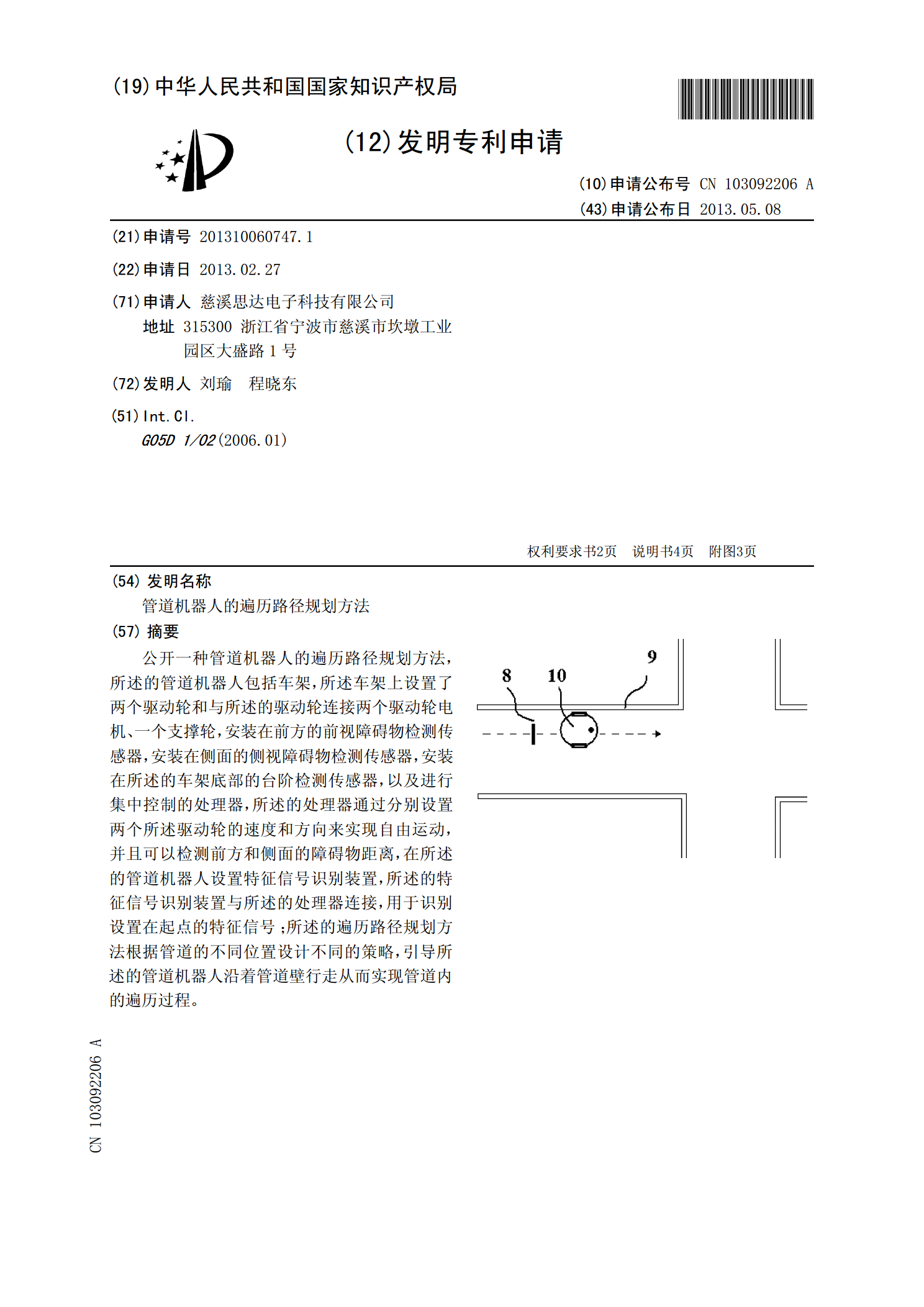
公开一种管道机器人的遍历路径规划方法,所述的管道机器人包括车架,所述车架上设置了两个驱动轮和与所述的驱动轮连接两个驱动轮电机、一个支撑轮,安装在前方的前视障碍物检测传感器,安装在侧面的侧视障碍物检测传感器,安装在所述的车架底部的台阶检测传感器,以及进行集中控制的处理器,所述的处理器通过分别设置两个所述驱动轮的速度和方向来实现自由运动,并且可以检测前方和侧面的障碍物距离,在所述的管道机器人设置特征信号识别装置,所述的特征信号识别装置与所述的处理器连接,用于识别设置在起点的特征信号;所述的遍历路径规划方法根据

一种移动机器人的全覆盖路径规划方法.pdf
本发明提供了一种移动机器人的全覆盖路径规划方法,该方法通过解决优化分割覆盖及这个过程中的路径规划问题实现的新的覆盖算法,该算法不需要预先知道地图空间环境,在覆盖的同时进行区域划分,并且这个过程是增量式覆盖,实现动态覆盖划分,并且可对动态出现的障碍物做实时选择规划,从而实现避障完成覆盖的双重任务。该方法不仅可以运用于拓扑环境规则的地图环境,而且同样适用于复杂区域环境空间,相比于牛耕分割算法更具优势。
移动机器人完全遍历路径规划算法研究.pdf
东南大学硕士学位论文移动机器人完全遍历路径规划算法研究姓名:胡正聪申请学位级别:硕士专业:机械电子工程指导教师:张赤斌20080403摘要移动机器人完全遍历路径规划算法研究指导老N.-张赤斌副教授(东南大学机械工程学院,南京)研究生:胡正聪何环境中的各个特征分别进行了描述,提出了适用于几何环境地图的未知环境漫游规则和提出几何区域中各区域之间距离的定义。根据漫游得到的区域连通关系矩阵和距离矩阵,随着人工智能、智能控制、仿生学等理论的发展,移动机器人技术的研究受到越来越多的学者重视,移动机器人在生产、生活中也