
清洁机器人全覆盖实时路径规划方法及装置.pdf

一条****涛k

1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

清洁机器人全覆盖实时路径规划方法及装置.pdf
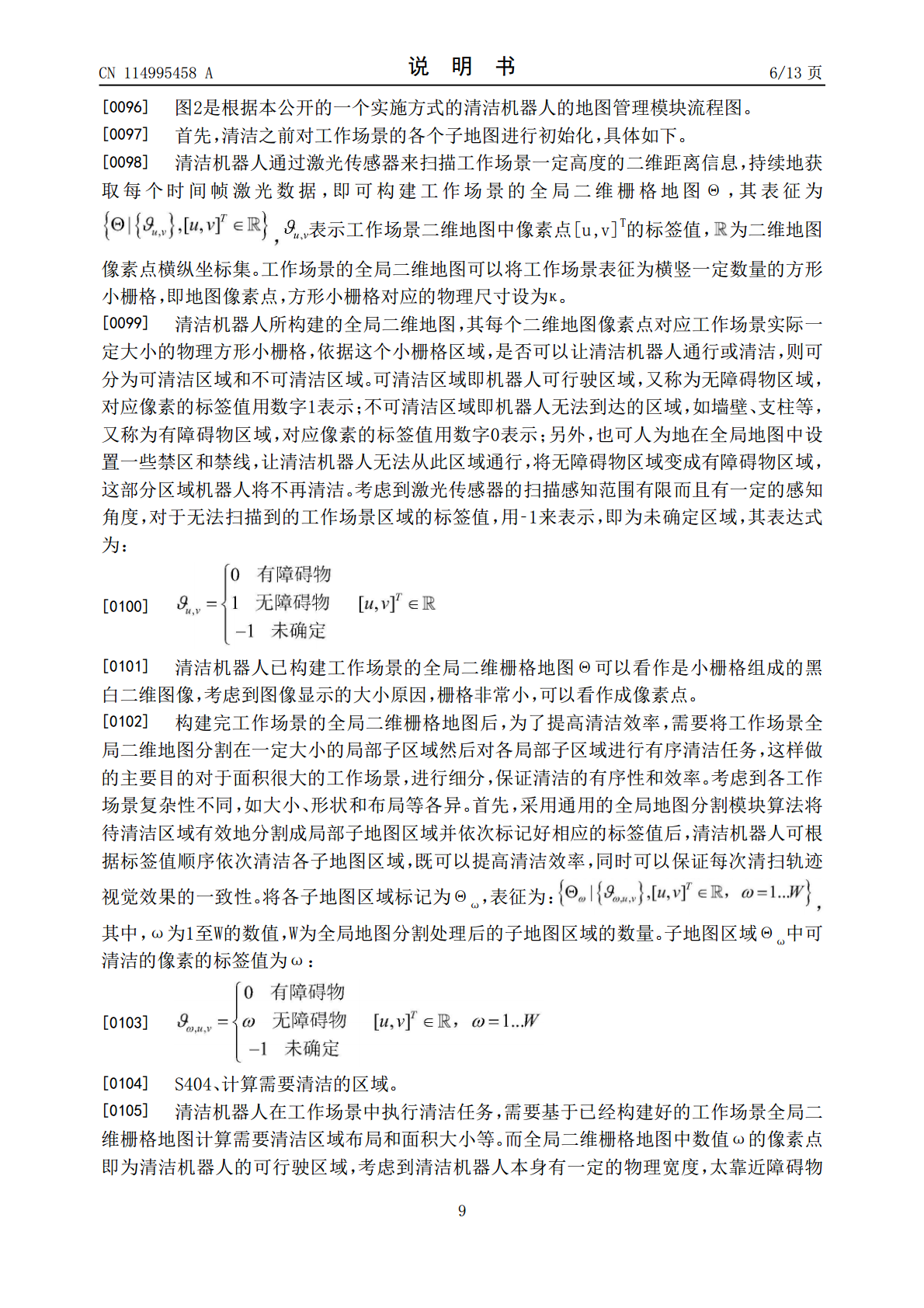
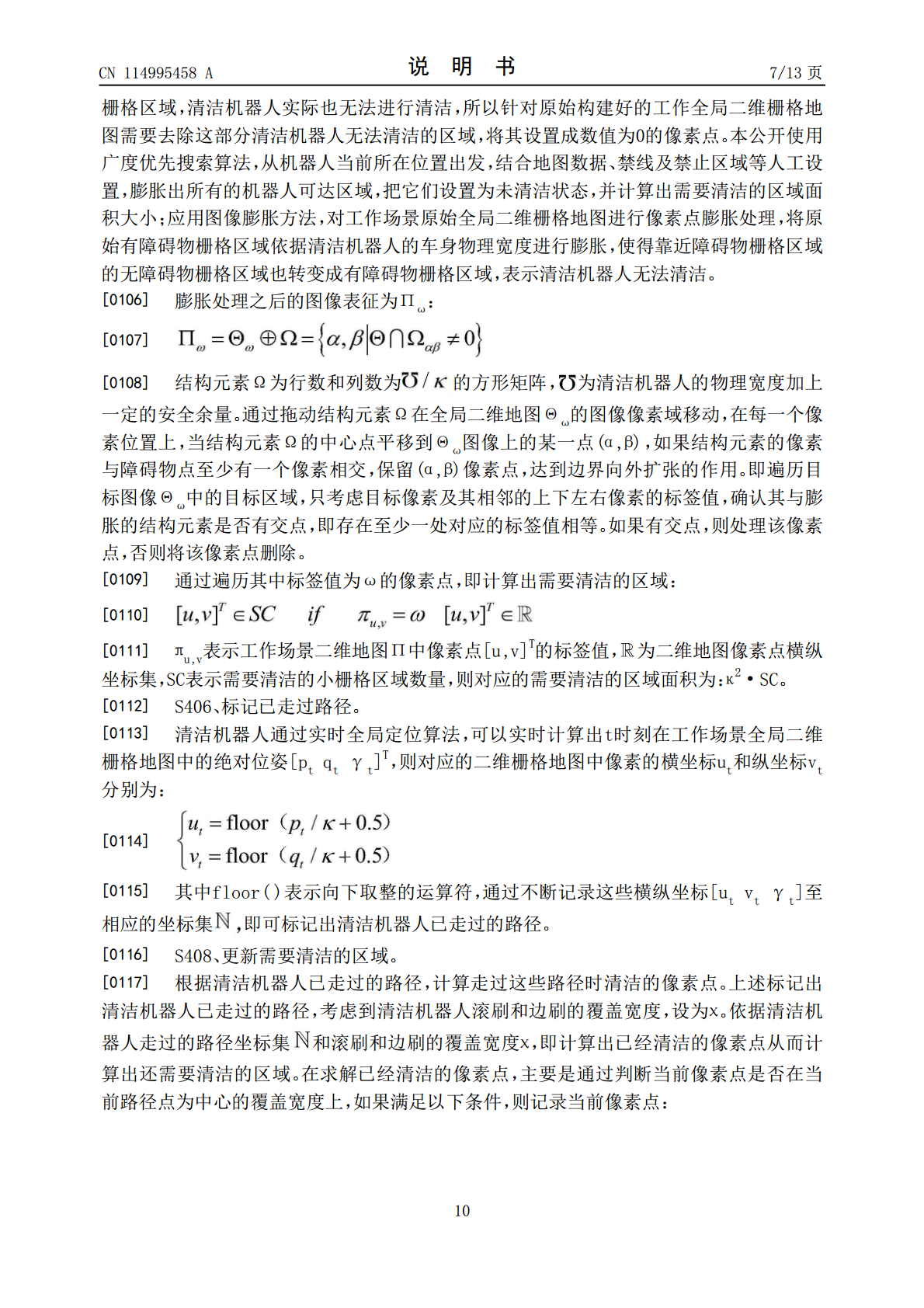
本公开提供清洁机器人全覆盖实时路径规划方法,包括:将清洁机器人工作场景划分为多个子地图区域,并对各个子地图区域进行初始化;选择各个子地图区域中的一个作为起始子地图区域;对起始子地图区域沿边清洁,通过沿边清洁以完成对子地图区域轮廓的闭环检测;在起始子地图区域内部进行折线清洁,并实时更新起始子地图区域内像素点的清洁状态;分别对起始子地图区域以外的各个子地图区域沿边清洁并折线清洁。本公开还提供了一种清洁机器人全覆盖实时路径规划装置、电子设备以及可读存储介质。

灌溉机器人全覆盖路径规划方法.docx
灌溉机器人全覆盖路径规划方法1.内容概要介绍了灌溉机器人在现代农业中的应用背景和重要意义,以及目前国内外研究现状和存在的问题。针对现有技术在灌溉机器人路径规划方面的不足,提出了本研究的目的和意义。简要介绍了常用的路径规划算法(如Dijkstra算法、A算法等),并与本研究所使用的全覆盖路径规划方法进行了对比分析。对覆盖区域的概念、计算方法以及基于覆盖区域的路径规划方法进行了阐述。详细介绍了本研究所提出的全覆盖路径规划方法,包括以下几个关键步骤:利用已有的路径规划算法或提出新的算法,为机器人生成全覆盖的路径

一种移动机器人的全覆盖路径规划方法.pdf
本发明提供了一种移动机器人的全覆盖路径规划方法,该方法通过解决优化分割覆盖及这个过程中的路径规划问题实现的新的覆盖算法,该算法不需要预先知道地图空间环境,在覆盖的同时进行区域划分,并且这个过程是增量式覆盖,实现动态覆盖划分,并且可对动态出现的障碍物做实时选择规划,从而实现避障完成覆盖的双重任务。该方法不仅可以运用于拓扑环境规则的地图环境,而且同样适用于复杂区域环境空间,相比于牛耕分割算法更具优势。

无人农机的全覆盖路径规划方法、装置及电子设备.pdf
本发明公开一种无人农机的全覆盖路径规划方法、装置及电子设备,属于路径规划技术领域,包括:获取工作区域的地形信息和无人农机的工作参数;基于地形信息和工作参数确定无人农机工作的起始点、工作方向、进弯点和出弯点等关键控制点;在确定出关键控制点后,以起始点开始进行直线路径规划,在直线路径规划过程中存在障碍物时,进行避障路径规划,在到达转弯区域时,进行转弯路径规划,直至遍历完整个工作区域后,进行封圈路径规划,完成工作区域的全覆盖路径规划,并将规划的路径存储并发送至控制器,控制无人农机工作。本申请基于计算出的关键控制
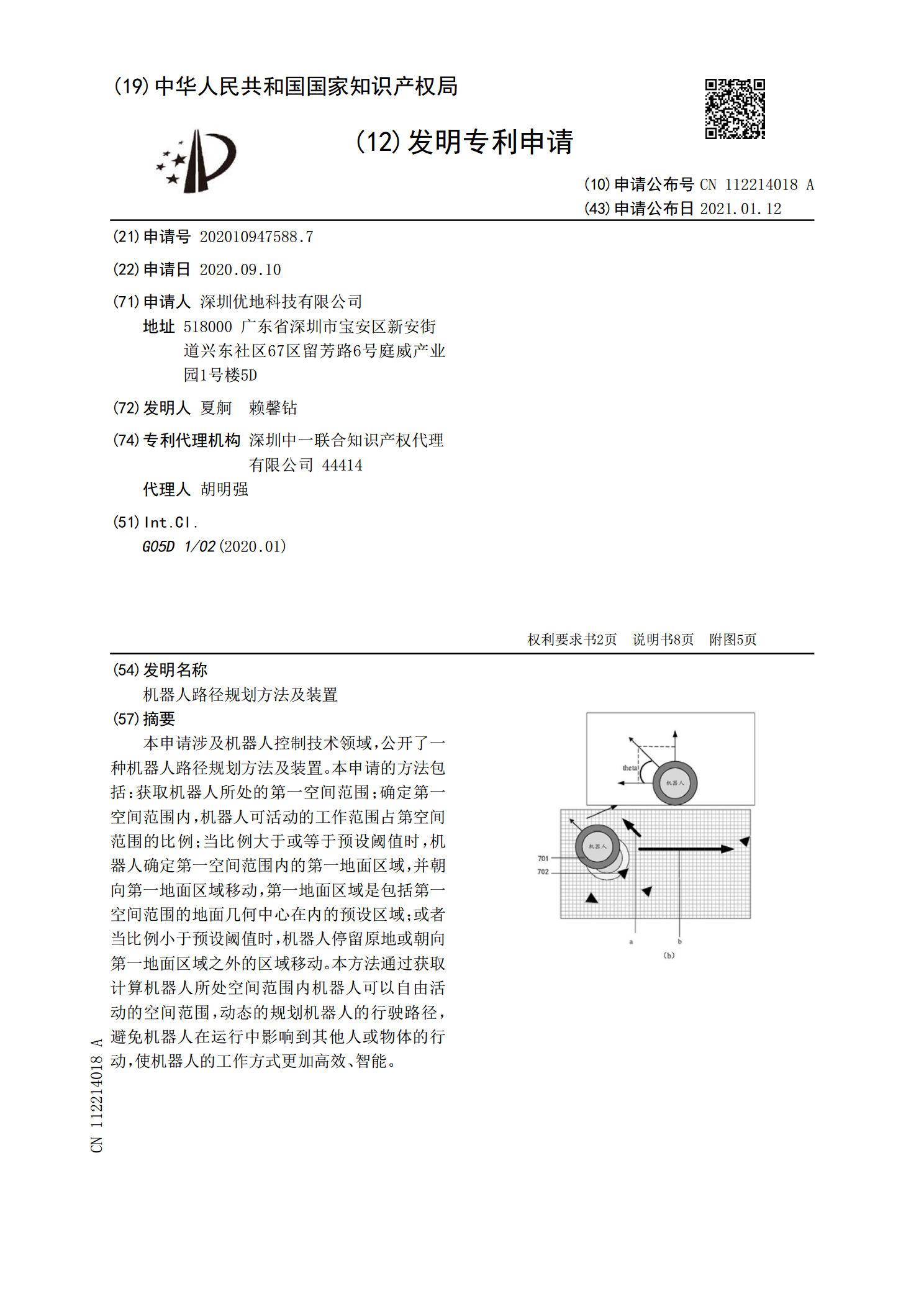
机器人路径规划方法及装置.pdf
本申请涉及机器人控制技术领域,公开了一种机器人路径规划方法及装置。本申请的方法包括:获取机器人所处的第一空间范围;确定第一空间范围内,机器人可活动的工作范围占第空间范围的比例;当比例大于或等于预设阈值时,机器人确定第一空间范围内的第一地面区域,并朝向第一地面区域移动,第一地面区域是包括第一空间范围的地面几何中心在内的预设区域;或者当比例小于预设阈值时,机器人停留原地或朝向第一地面区域之外的区域移动。本方法通过获取计算机器人所处空间范围内机器人可以自由活动的空间范围,动态的规划机器人的行驶路径,避免机器人在