
一种移动机器人的全覆盖路径规划方法.pdf

纪阳****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种移动机器人的全覆盖路径规划方法.pdf
本发明提供了一种移动机器人的全覆盖路径规划方法,该方法通过解决优化分割覆盖及这个过程中的路径规划问题实现的新的覆盖算法,该算法不需要预先知道地图空间环境,在覆盖的同时进行区域划分,并且这个过程是增量式覆盖,实现动态覆盖划分,并且可对动态出现的障碍物做实时选择规划,从而实现避障完成覆盖的双重任务。该方法不仅可以运用于拓扑环境规则的地图环境,而且同样适用于复杂区域环境空间,相比于牛耕分割算法更具优势。

灌溉机器人全覆盖路径规划方法.docx
灌溉机器人全覆盖路径规划方法1.内容概要介绍了灌溉机器人在现代农业中的应用背景和重要意义,以及目前国内外研究现状和存在的问题。针对现有技术在灌溉机器人路径规划方面的不足,提出了本研究的目的和意义。简要介绍了常用的路径规划算法(如Dijkstra算法、A算法等),并与本研究所使用的全覆盖路径规划方法进行了对比分析。对覆盖区域的概念、计算方法以及基于覆盖区域的路径规划方法进行了阐述。详细介绍了本研究所提出的全覆盖路径规划方法,包括以下几个关键步骤:利用已有的路径规划算法或提出新的算法,为机器人生成全覆盖的路径
一种用于无人环卫车的全覆盖路径规划方法.pdf
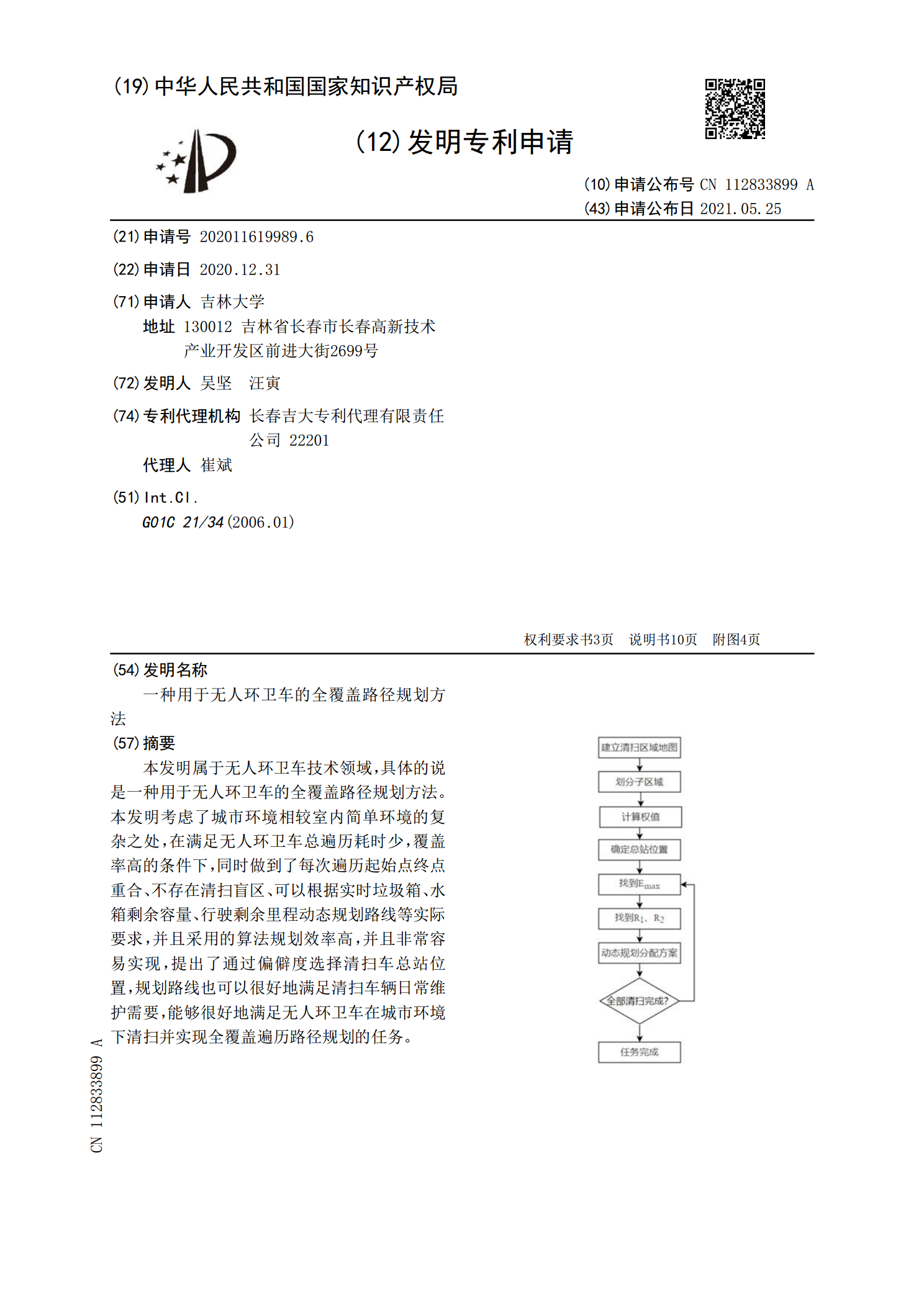
本发明属于无人环卫车技术领域,具体的说是一种用于无人环卫车的全覆盖路径规划方法。本发明考虑了城市环境相较室内简单环境的复杂之处,在满足无人环卫车总遍历耗时少,覆盖率高的条件下,同时做到了每次遍历起始点终点重合、不存在清扫盲区、可以根据实时垃圾箱、水箱剩余容量、行驶剩余里程动态规划路线等实际要求,并且采用的算法规划效率高,并且非常容易实现,提出了通过偏僻度选择清扫车总站位置,规划路线也可以很好地满足清扫车辆日常维护需要,能够很好地满足无人环卫车在城市环境下清扫并实现全覆盖遍历路径规划的任务。
一种分区域全覆盖路径规划方法、装置、设备及存储介质.pdf
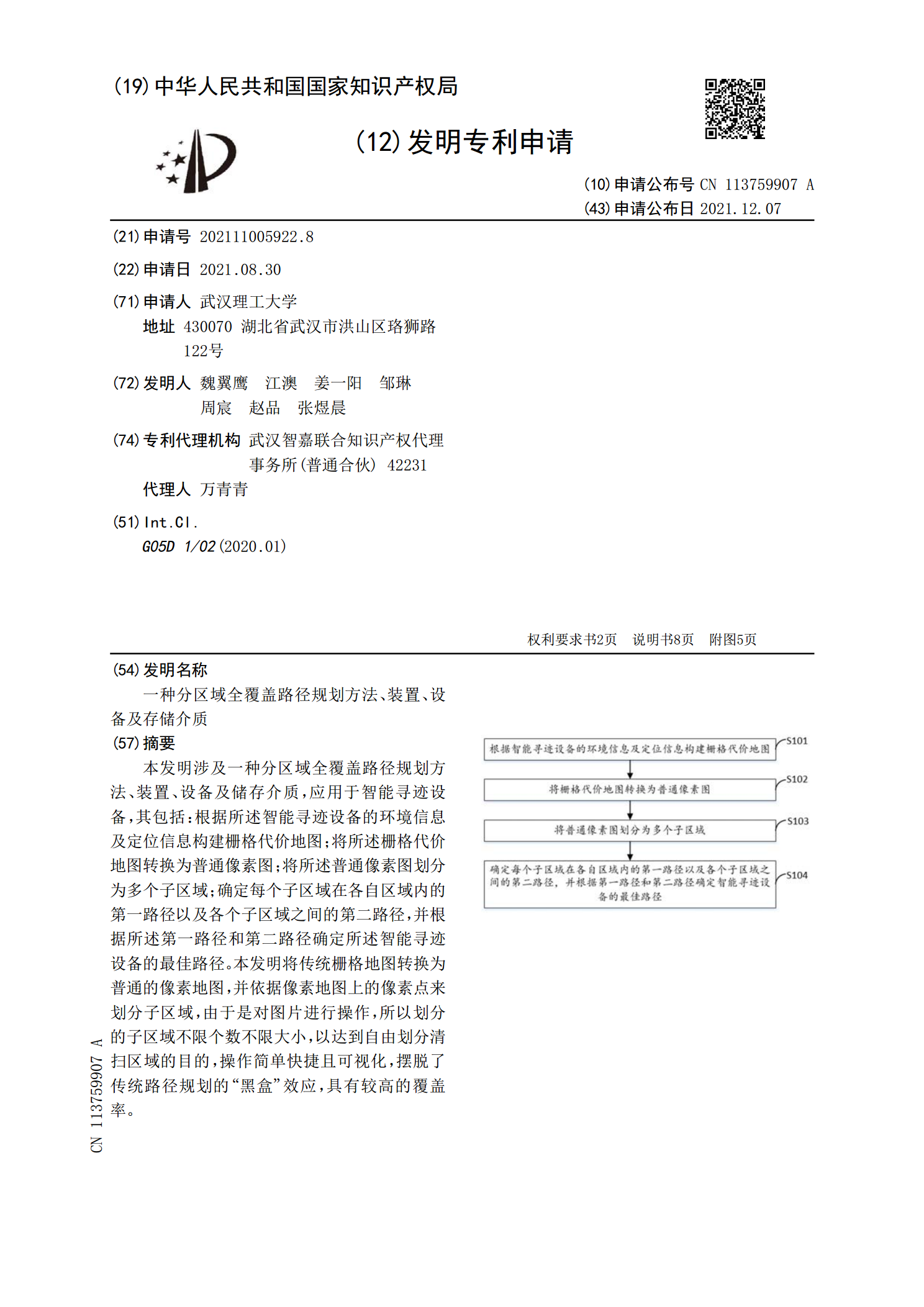
本发明涉及一种分区域全覆盖路径规划方法、装置、设备及储存介质,应用于智能寻迹设备,其包括:根据所述智能寻迹设备的环境信息及定位信息构建栅格代价地图;将所述栅格代价地图转换为普通像素图;将所述普通像素图划分为多个子区域;确定每个子区域在各自区域内的第一路径以及各个子区域之间的第二路径,并根据所述第一路径和第二路径确定所述智能寻迹设备的最佳路径。本发明将传统栅格地图转换为普通的像素地图,并依据像素地图上的像素点来划分子区域,由于是对图片进行操作,所以划分的子区域不限个数不限大小,以达到自由划分清扫区域的目的,
一种基于全覆盖路径的植保无人机航线规划方法.pdf
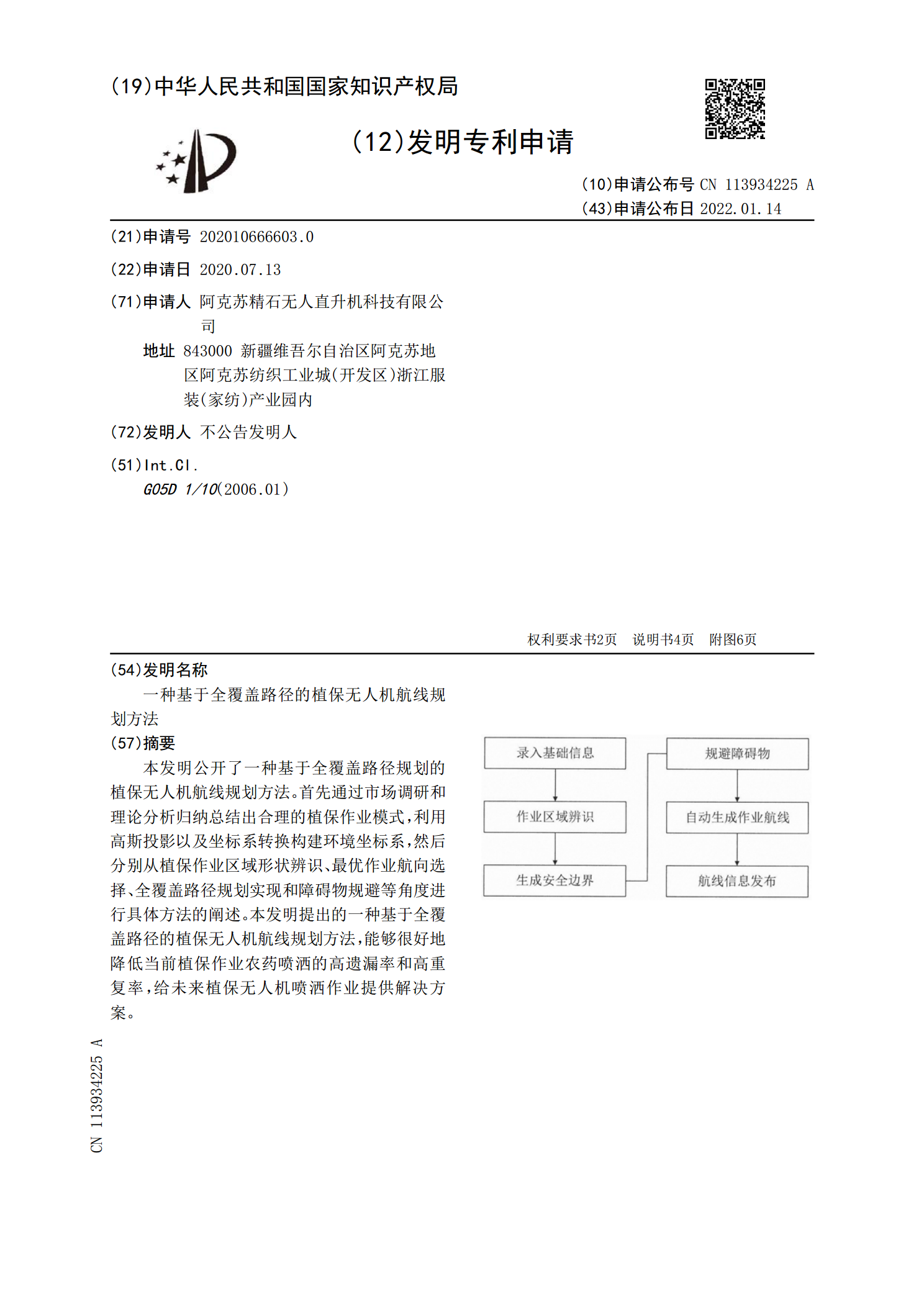
本发明公开了一种基于全覆盖路径规划的植保无人机航线规划方法。首先通过市场调研和理论分析归纳总结出合理的植保作业模式,利用高斯投影以及坐标系转换构建环境坐标系,然后分别从植保作业区域形状辨识、最优作业航向选择、全覆盖路径规划实现和障碍物规避等角度进行具体方法的阐述。本发明提出的一种基于全覆盖路径的植保无人机航线规划方法,能够很好地降低当前植保作业农药喷洒的高遗漏率和高重复率,给未来植保无人机喷洒作业提供解决方案。