
混合工件抓取方法、设备及计算机可读存储介质.pdf

猫巷****觅蓉


1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
混合工件抓取方法、设备及计算机可读存储介质.pdf
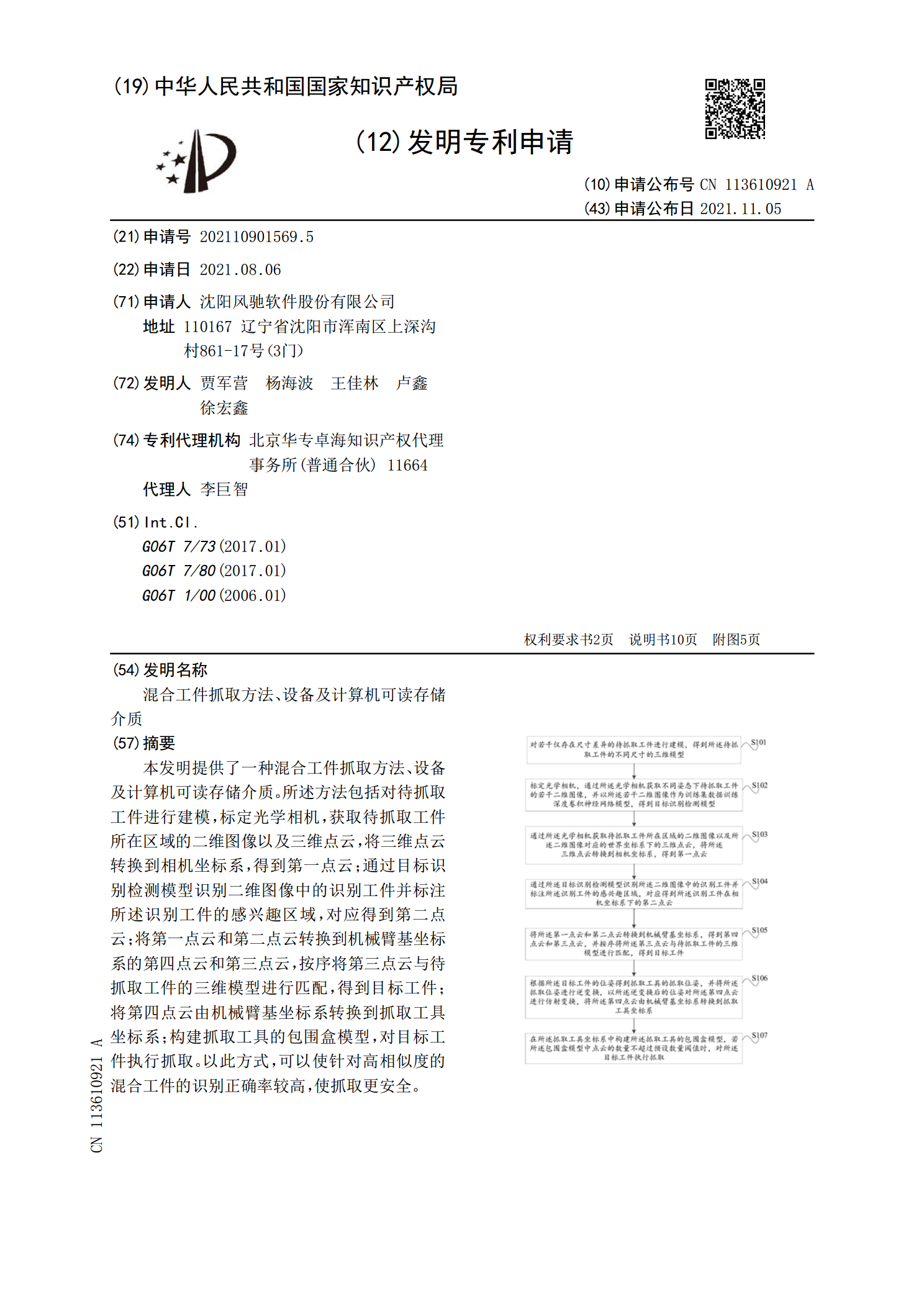
本发明提供了一种混合工件抓取方法、设备及计算机可读存储介质。所述方法包括对待抓取工件进行建模,标定光学相机,获取待抓取工件所在区域的二维图像以及三维点云,将三维点云转换到相机坐标系,得到第一点云;通过目标识别检测模型识别二维图像中的识别工件并标注所述识别工件的感兴趣区域,对应得到第二点云;将第一点云和第二点云转换到机械臂基坐标系的第四点云和第三点云,按序将第三点云与待抓取工件的三维模型进行匹配,得到目标工件;将第四点云由机械臂基坐标系转换到抓取工具坐标系;构建抓取工具的包围盒模型,对目标工件执行抓取。以此
物品抓取方法、装置、设备及计算机可读存储介质.pdf
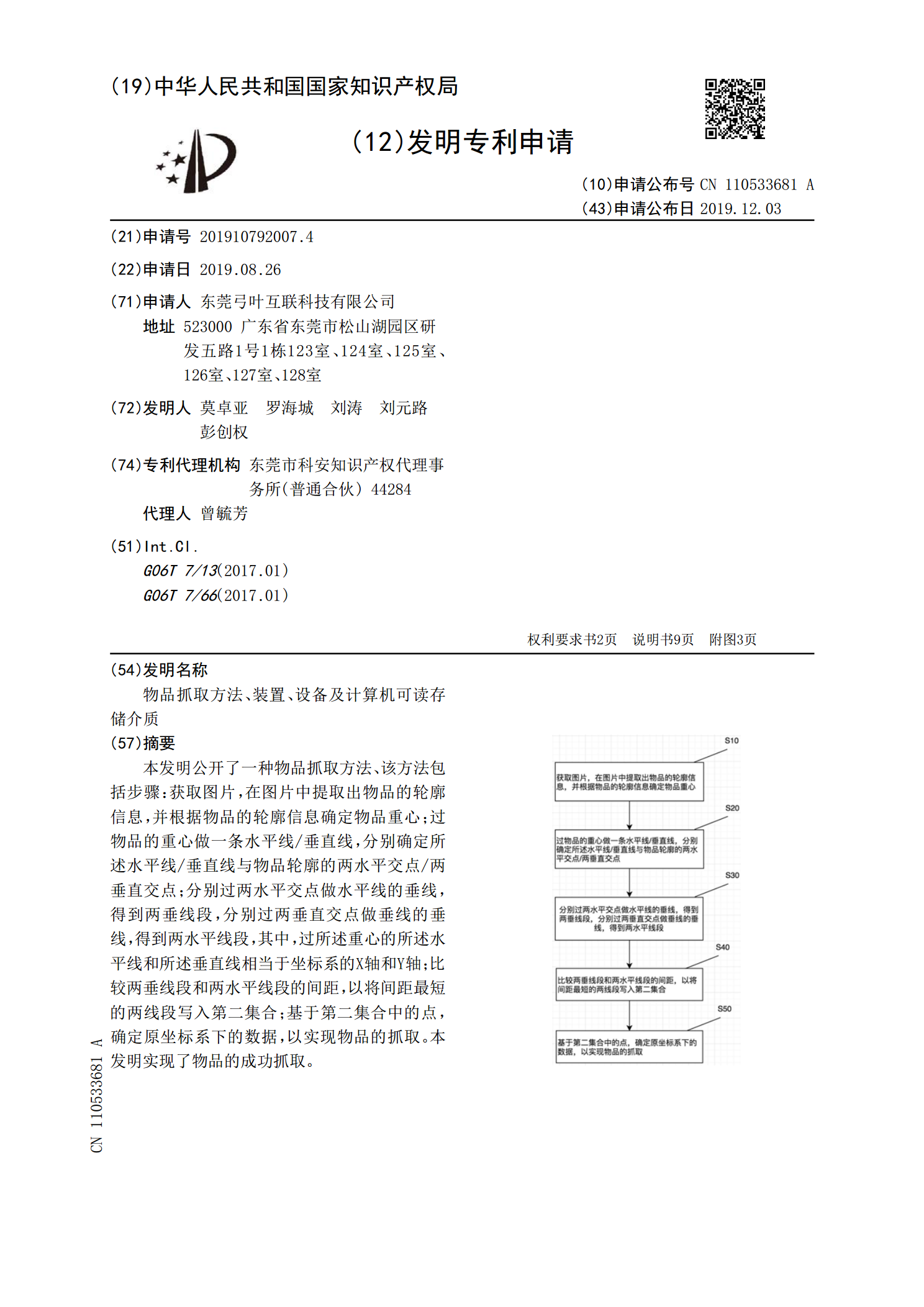
本发明公开了一种物品抓取方法、该方法包括步骤:获取图片,在图片中提取出物品的轮廓信息,并根据物品的轮廓信息确定物品重心;过物品的重心做一条水平线/垂直线,分别确定所述水平线/垂直线与物品轮廓的两水平交点/两垂直交点;分别过两水平交点做水平线的垂线,得到两垂线段,分别过两垂直交点做垂线的垂线,得到两水平线段,其中,过所述重心的所述水平线和所述垂直线相当于坐标系的X轴和Y轴;比较两垂线段和两水平线段的间距,以将间距最短的两线段写入第二集合;基于第二集合中的点,确定原坐标系下的数据,以实现物品的抓取。本发明实现
物体抓取方法、装置、电子设备及可读存储介质.pdf
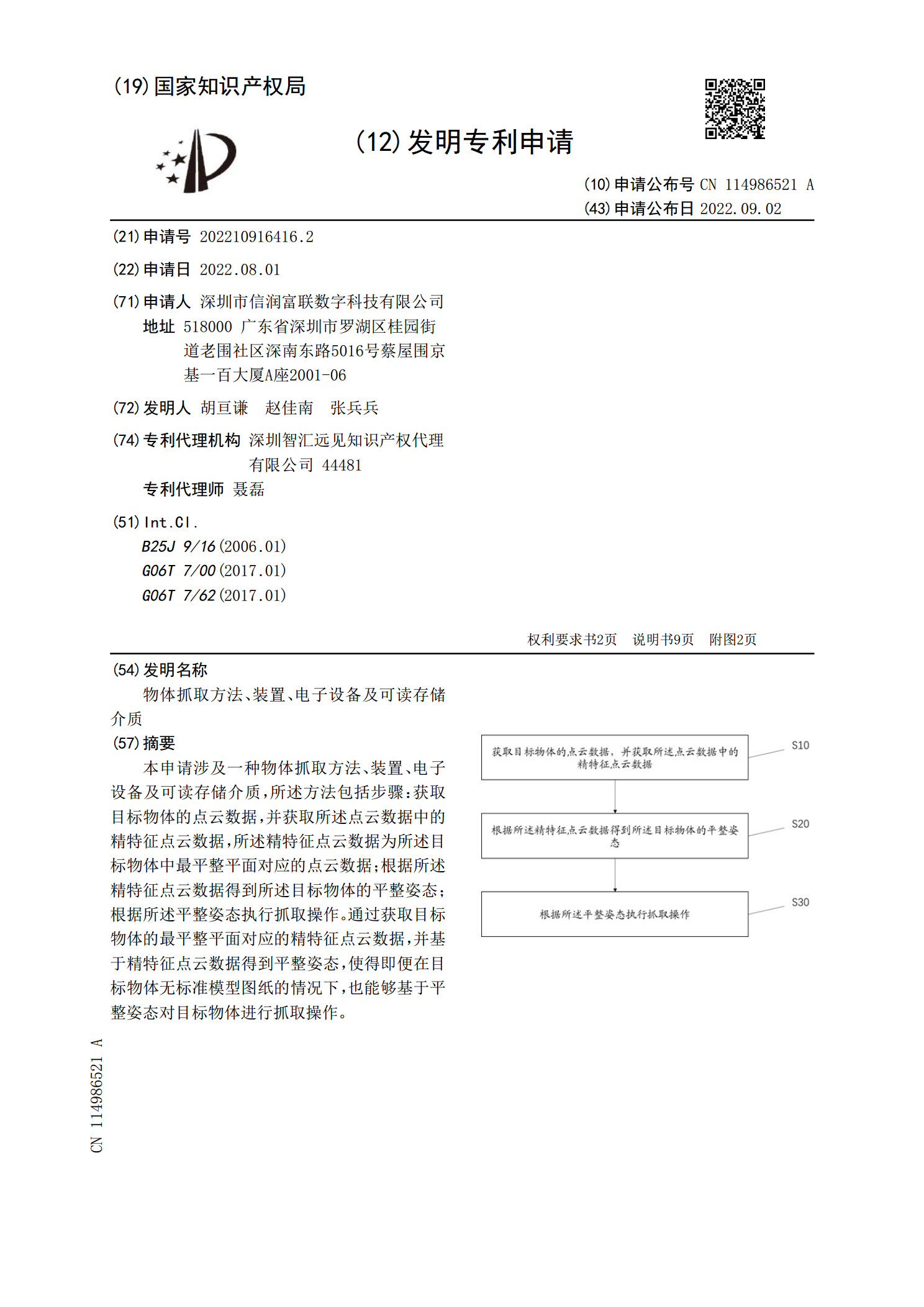
本申请涉及一种物体抓取方法、装置、电子设备及可读存储介质,所述方法包括步骤:获取目标物体的点云数据,并获取所述点云数据中的精特征点云数据,所述精特征点云数据为所述目标物体中最平整平面对应的点云数据;根据所述精特征点云数据得到所述目标物体的平整姿态;根据所述平整姿态执行抓取操作。通过获取目标物体的最平整平面对应的精特征点云数据,并基于精特征点云数据得到平整姿态,使得即便在目标物体无标准模型图纸的情况下,也能够基于平整姿态对目标物体进行抓取操作。

一种工件抓取方法、装置、设备和存储介质.pdf
本发明公开了一种工件抓取方法、装置、设备和存储介质。该方法包括:通过深度相机获取工作场景对应的场景点云;基于点云匹配算法,根据场景点云、预先构建的工件模型以及预先构建的料框模型,确定深度相机坐标系下的第一工件姿态和第一料框姿态;根据预设的深度相机坐标系与机械臂坐标系之间的对应关系,以及第一工件姿态、第一料框姿态和预设抓取姿态,确定机械臂的目标抓取姿态;获取目标抓取姿态对应的可调夹爪的调整关节角度;根据调整关节角度控制机械臂对料框中的工件进行抓取。本发明实施例利用可调整夹爪提供的额外自由度,可以在使用成本较

节目流数据抓取方法、装置、计算机设备及可读存储介质.pdf
本申请实施例中提供了一种节目流数据抓取方法、装置、计算机设备及可读存储介质,通过从多个节目流中获取待处理节目流;再对待处理节目流进行分片,得到多个待处理节目元数据;接着利用与待处理节目元数据对应的线程将多个待处理节目元数据进行缓存;然后将缓存的多个待处理节目元数据输出,得到多个目标节目元数据;最终响应于抓包停止指令,将输出的多个目标节目元数据进行合并,得到目标节目流数据,如此设计,相较于相关技术中的抓包工具无法对高带宽、高速率的节目媒体流进行无丢包的原始数据抓包,本方案采取了对待处理节目流进行分片抓包的处