
物体抓取方法、装置、电子设备及可读存储介质.pdf

依波****bc

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
物体抓取方法、装置、电子设备及可读存储介质.pdf
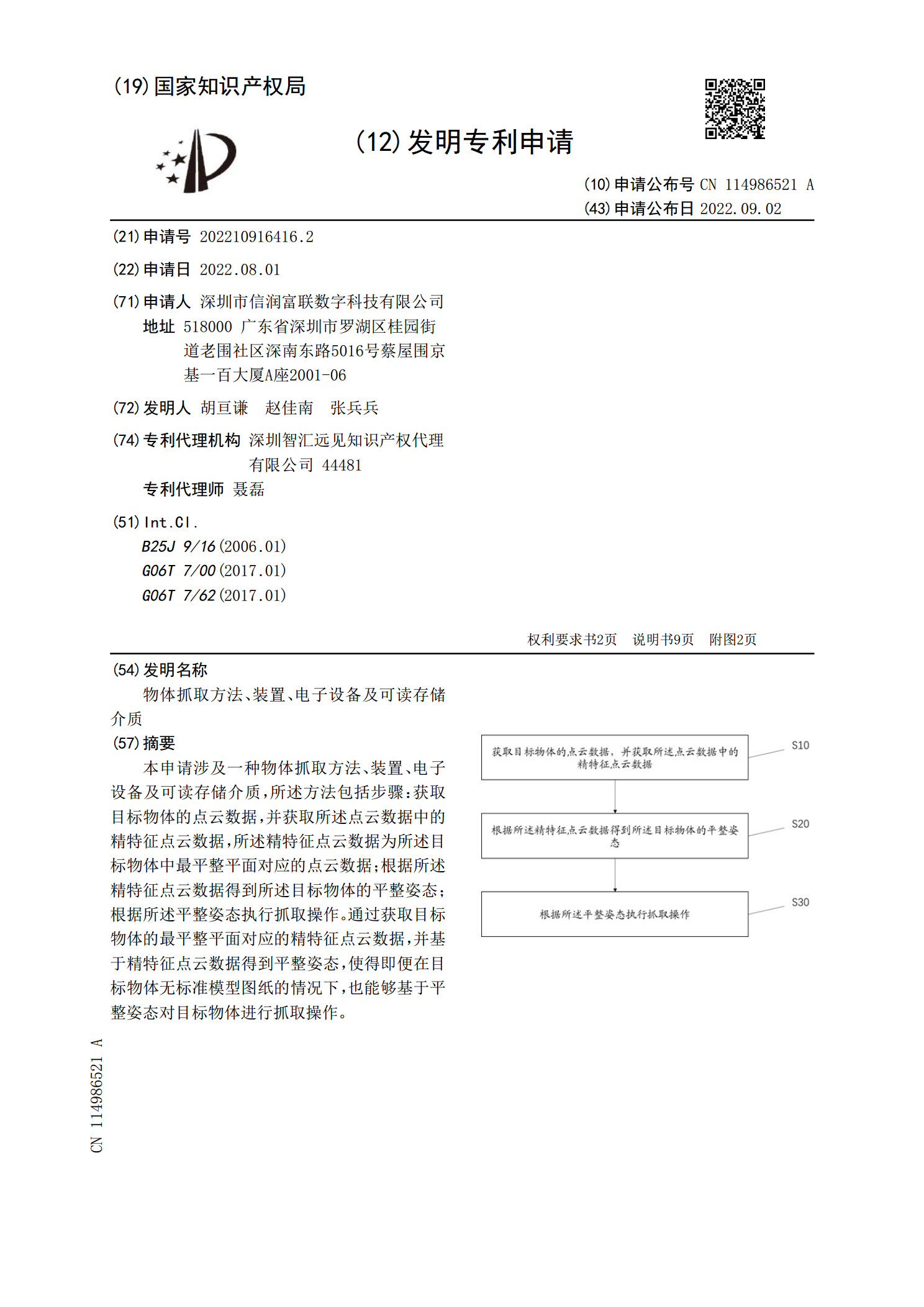
本申请涉及一种物体抓取方法、装置、电子设备及可读存储介质,所述方法包括步骤:获取目标物体的点云数据,并获取所述点云数据中的精特征点云数据,所述精特征点云数据为所述目标物体中最平整平面对应的点云数据;根据所述精特征点云数据得到所述目标物体的平整姿态;根据所述平整姿态执行抓取操作。通过获取目标物体的最平整平面对应的精特征点云数据,并基于精特征点云数据得到平整姿态,使得即便在目标物体无标准模型图纸的情况下,也能够基于平整姿态对目标物体进行抓取操作。

数据抓取方法、装置、存储介质及电子设备.pdf
本公开涉及一种数据抓取方法、装置、存储介质及电子设备,以使用户可以根据需求配置数据抓取任务,无需针对不同网站进行定制开发,就能够抓取所需的数据,耗时短、灵活性高。所述方法包括:获取用户配置的目标数据抓取任务,并从所述目标数据抓取任务中获取目标抓取地址以及所述目标抓取地址对应的目标解析模板;访问所述目标抓取地址对应的目标网页,并获取所述目标网页的页面信息;根据所述目标解析模板解析所述目标网页的页面信息,得到目标数据,并存储所述目标数据。
物体抓取方法、装置、机器人及存储介质.pdf
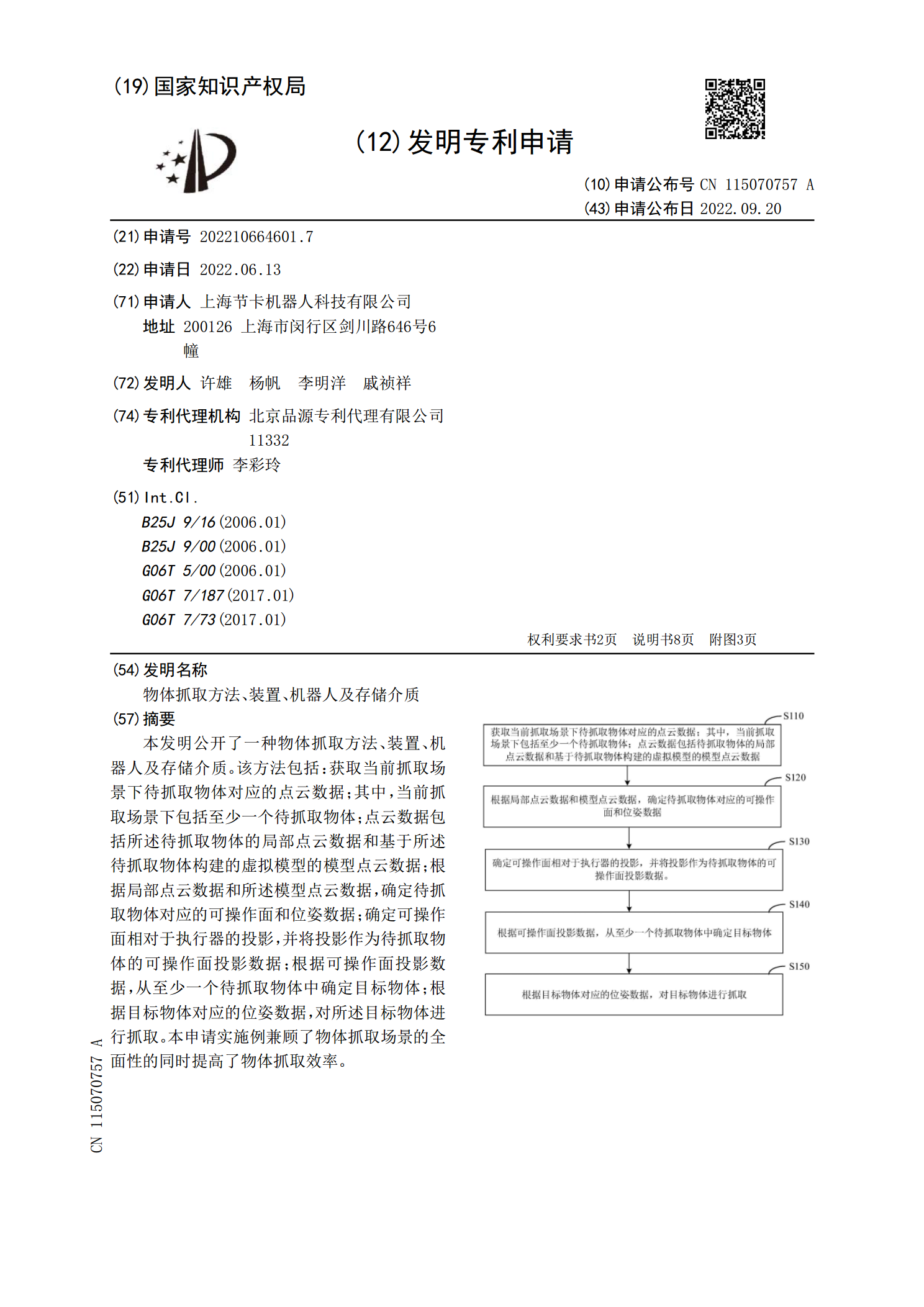
本发明公开了一种物体抓取方法、装置、机器人及存储介质。该方法包括:获取当前抓取场景下待抓取物体对应的点云数据;其中,当前抓取场景下包括至少一个待抓取物体;点云数据包括所述待抓取物体的局部点云数据和基于所述待抓取物体构建的虚拟模型的模型点云数据;根据局部点云数据和所述模型点云数据,确定待抓取物体对应的可操作面和位姿数据;确定可操作面相对于执行器的投影,并将投影作为待抓取物体的可操作面投影数据;根据可操作面投影数据,从至少一个待抓取物体中确定目标物体;根据目标物体对应的位姿数据,对所述目标物体进行抓取。本申请
数据存储方法、装置、电子设备及可读存储介质.pdf
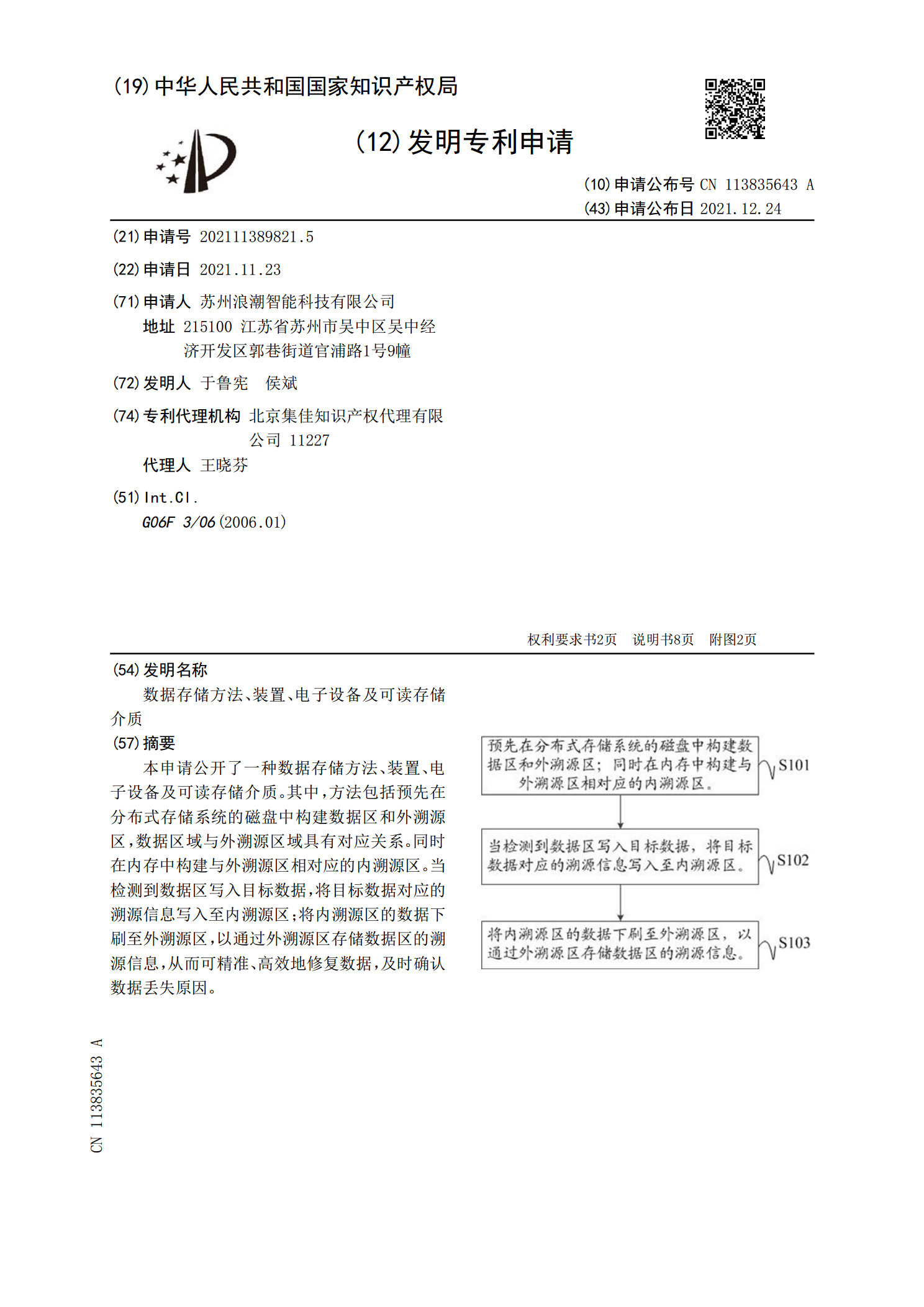
本申请公开了一种数据存储方法、装置、电子设备及可读存储介质。其中,方法包括预先在分布式存储系统的磁盘中构建数据区和外溯源区,数据区域与外溯源区域具有对应关系。同时在内存中构建与外溯源区相对应的内溯源区。当检测到数据区写入目标数据,将目标数据对应的溯源信息写入至内溯源区;将内溯源区的数据下刷至外溯源区,以通过外溯源区存储数据区的溯源信息,从而可精准、高效地修复数据,及时确认数据丢失原因。
目标物体定位方法、装置及可读存储介质.pdf
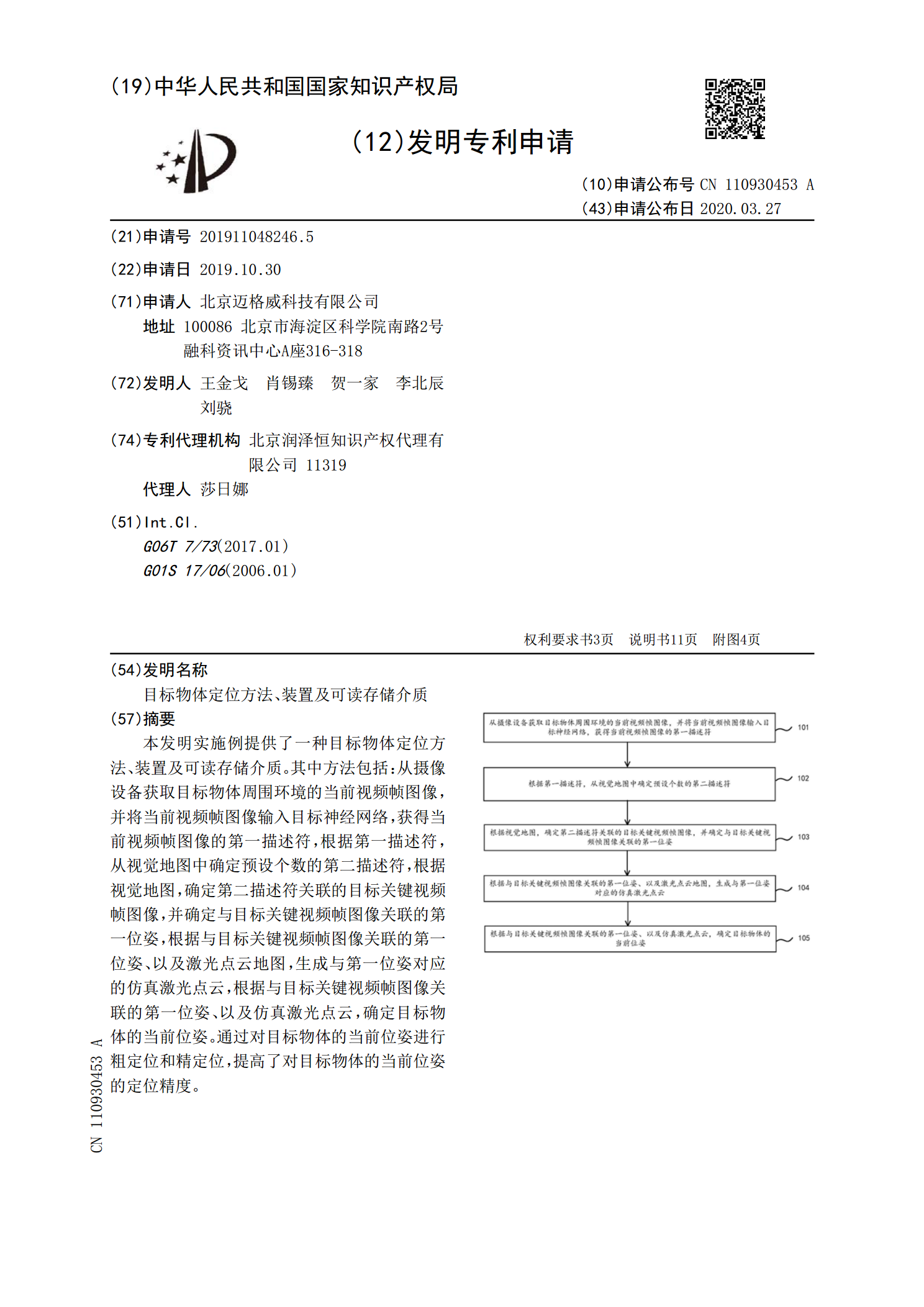
本发明实施例提供了一种目标物体定位方法、装置及可读存储介质。其中方法包括:从摄像设备获取目标物体周围环境的当前视频帧图像,并将当前视频帧图像输入目标神经网络,获得当前视频帧图像的第一描述符,根据第一描述符,从视觉地图中确定预设个数的第二描述符,根据视觉地图,确定第二描述符关联的目标关键视频帧图像,并确定与目标关键视频帧图像关联的第一位姿,根据与目标关键视频帧图像关联的第一位姿、以及激光点云地图,生成与第一位姿对应的仿真激光点云,根据与目标关键视频帧图像关联的第一位姿、以及仿真激光点云,确定目标物体的当前位