
一种机械臂运动学参数标定方法及系统.pdf

冷霜****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机械臂运动学参数标定方法及系统.pdf
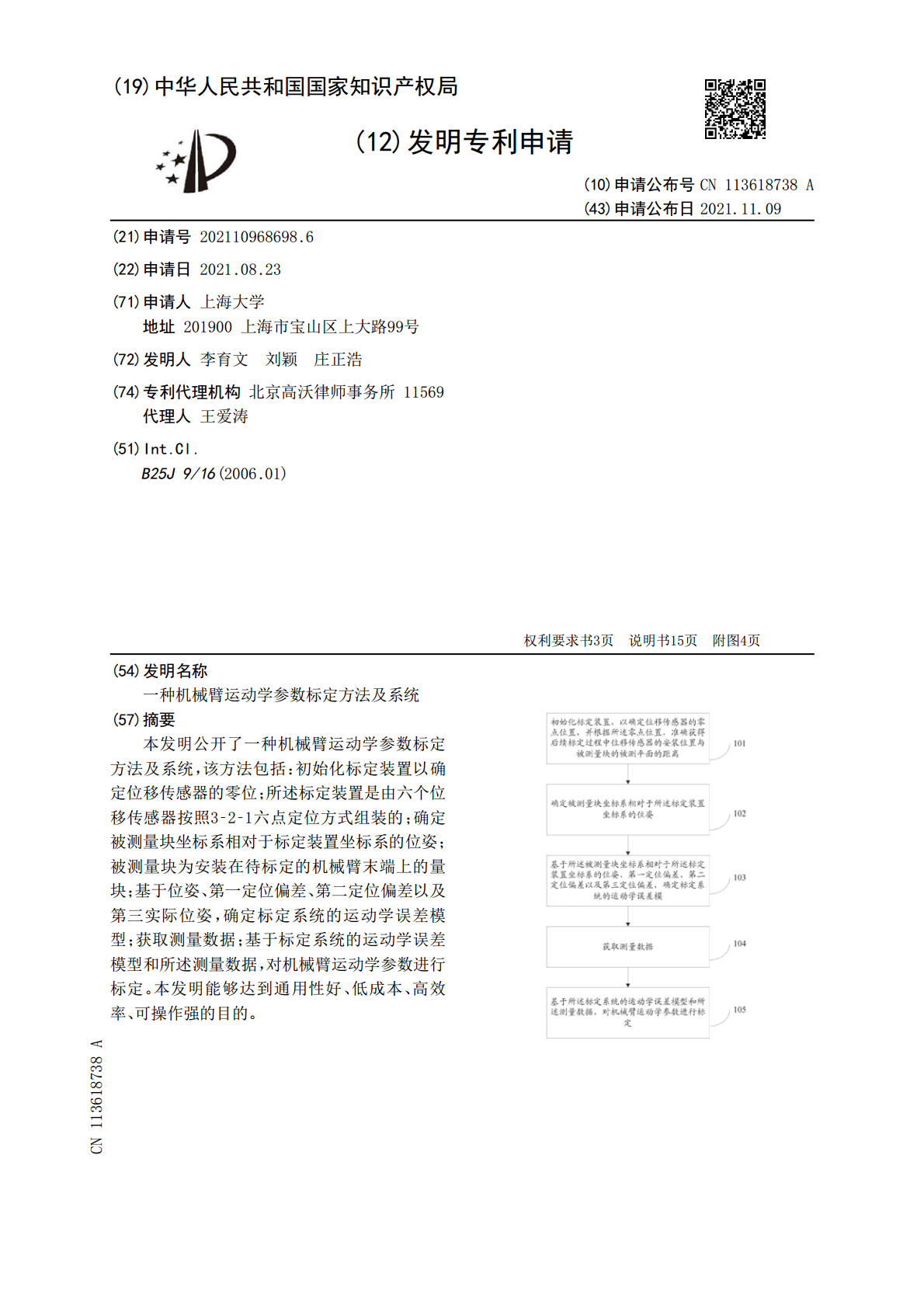
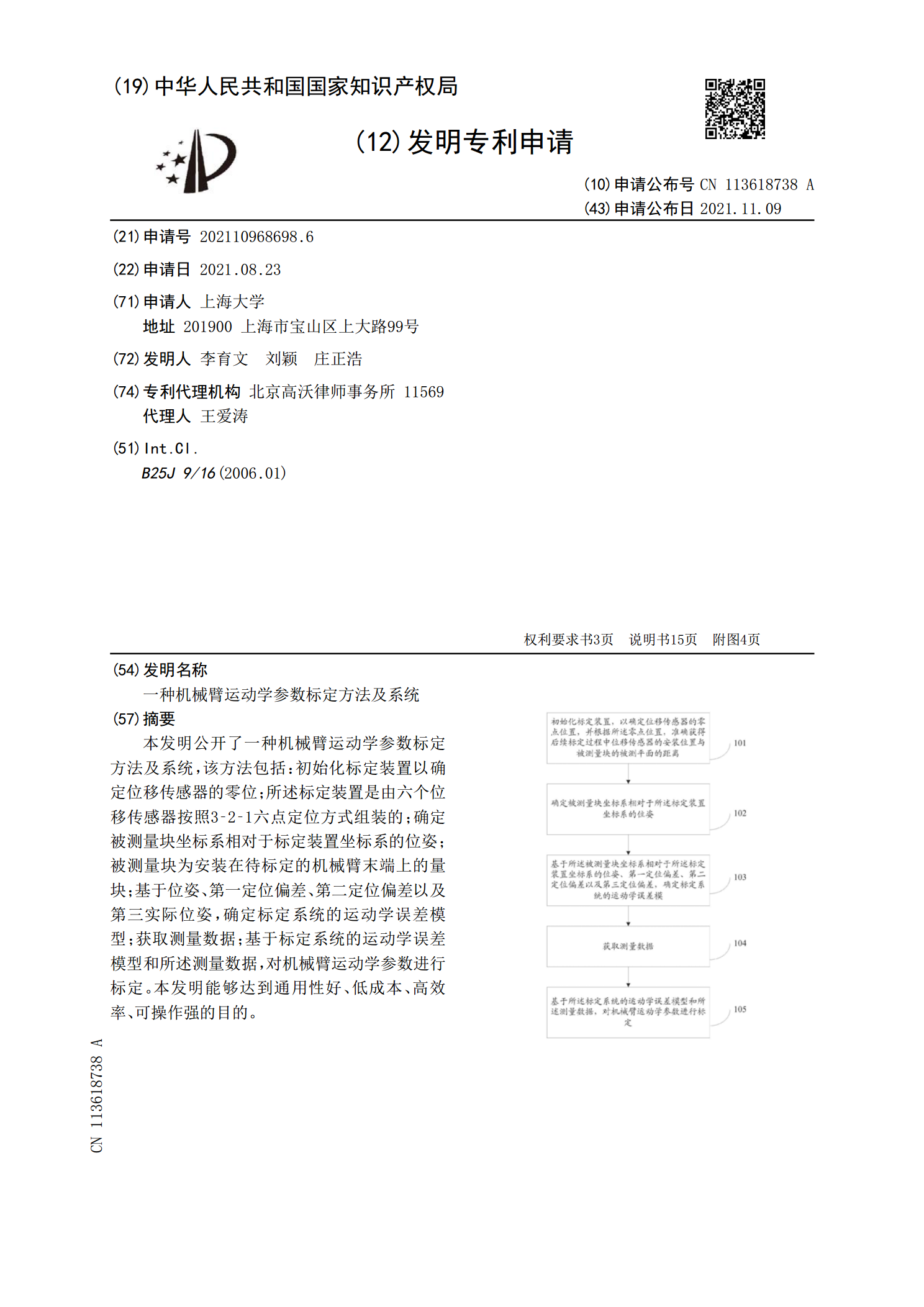
本发明公开了一种机械臂运动学参数标定方法及系统,该方法包括:初始化标定装置以确定位移传感器的零位;所述标定装置是由六个位移传感器按照3‑2‑1六点定位方式组装的;确定被测量块坐标系相对于标定装置坐标系的位姿;被测量块为安装在待标定的机械臂末端上的量块;基于位姿、第一定位偏差、第二定位偏差以及第三实际位姿,确定标定系统的运动学误差模型;获取测量数据;基于标定系统的运动学误差模型和所述测量数据,对机械臂运动学参数进行标定。本发明能够达到通用性好、低成本、高效率、可操作强的目的。
一种基于双目视觉的机械臂运动学自标定方法.pdf
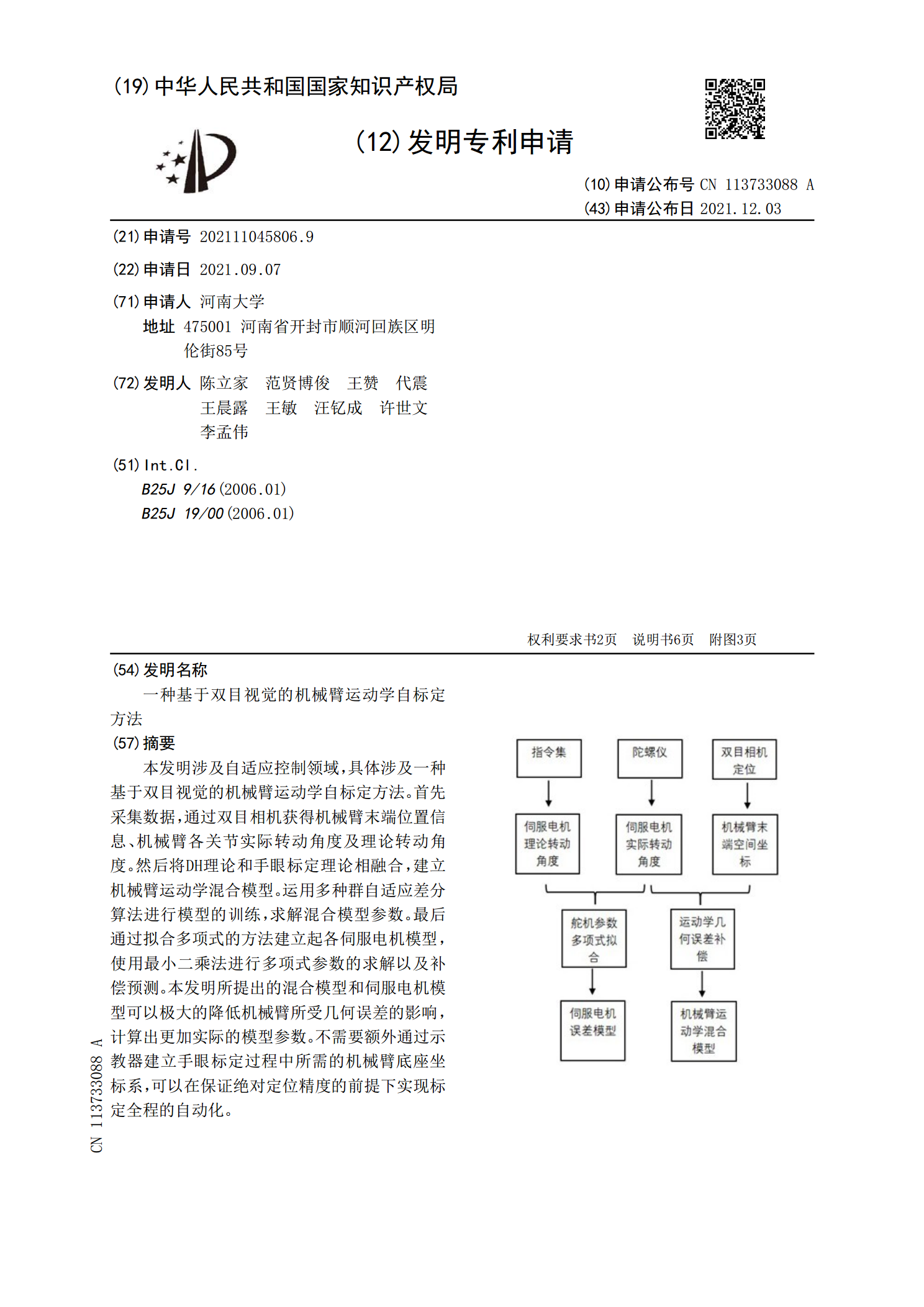
本发明涉及自适应控制领域,具体涉及一种基于双目视觉的机械臂运动学自标定方法。首先采集数据,通过双目相机获得机械臂末端位置信息、机械臂各关节实际转动角度及理论转动角度。然后将DH理论和手眼标定理论相融合,建立机械臂运动学混合模型。运用多种群自适应差分算法进行模型的训练,求解混合模型参数。最后通过拟合多项式的方法建立起各伺服电机模型,使用最小二乘法进行多项式参数的求解以及补偿预测。本发明所提出的混合模型和伺服电机模型可以极大的降低机械臂所受几何误差的影响,计算出更加实际的模型参数。不需要额外通过示教器建立手眼
机械臂标定方法、装置、系统、介质、控制器及机械臂.pdf
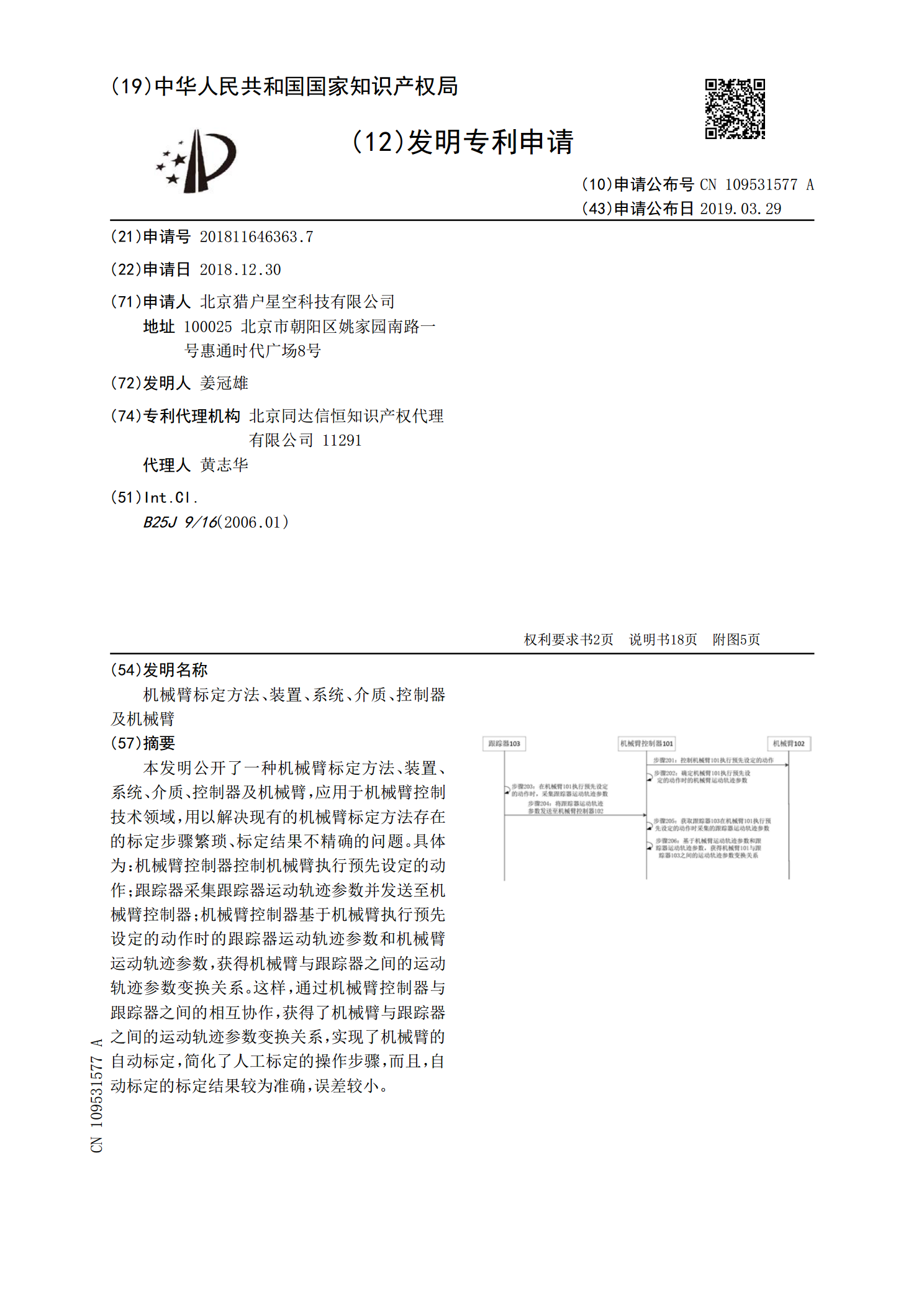
本发明公开了一种机械臂标定方法、装置、系统、介质、控制器及机械臂,应用于机械臂控制技术领域,用以解决现有的机械臂标定方法存在的标定步骤繁琐、标定结果不精确的问题。具体为:机械臂控制器控制机械臂执行预先设定的动作;跟踪器采集跟踪器运动轨迹参数并发送至机械臂控制器;机械臂控制器基于机械臂执行预先设定的动作时的跟踪器运动轨迹参数和机械臂运动轨迹参数,获得机械臂与跟踪器之间的运动轨迹参数变换关系。这样,通过机械臂控制器与跟踪器之间的相互协作,获得了机械臂与跟踪器之间的运动轨迹参数变换关系,实现了机械臂的自动标定,

一种机械臂末端构件标定方法.pdf
本发明公开了一种机械臂末端构件标定方法,包括:通过光学定位系统识别末端构件上的标记点得到末端构件相对于光学定位系统的位姿;设定机械臂末端上一点,并以该点为基准设定三个方向,分别控制机械臂运动使得末端构件绕该点进行球面运动和使得末端构件以该三个方向为轴进行旋转运动,通过光学定位系统获取运动过程中标记点位置,据此计算得到机械臂末端相对于光学定位系统的位姿;根据机械臂设计参数得到机械臂末端相对于机械臂系统的位姿,据此计算得到末端构件相对于机械臂系统的位姿。本发明可以快速实现机械臂末端构件的标定,使得手术机器人的
Stewart平台运动学参数的机器视觉标定方法.pdf
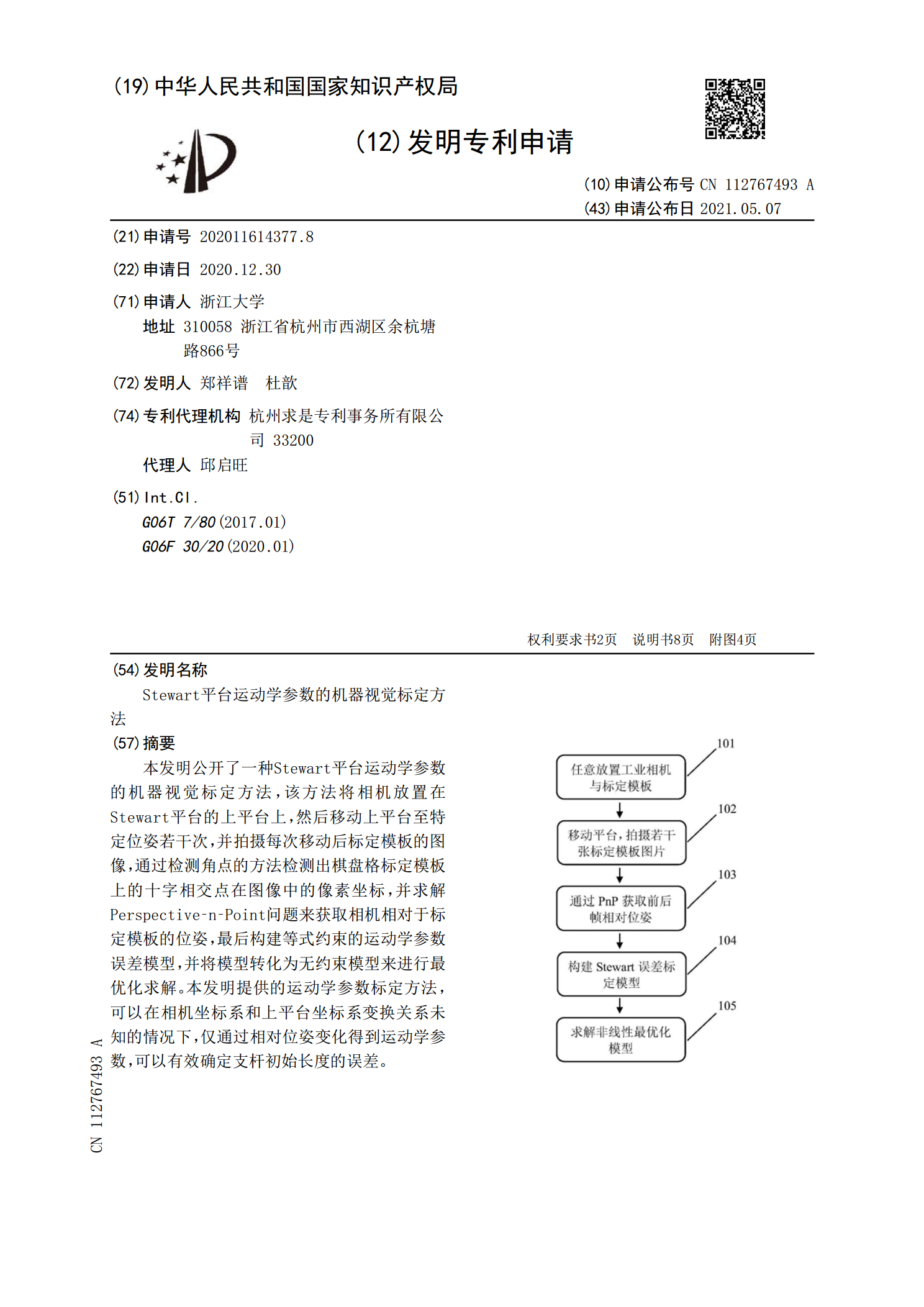
本发明公开了一种Stewart平台运动学参数的机器视觉标定方法,该方法将相机放置在Stewart平台的上平台上,然后移动上平台至特定位姿若干次,并拍摄每次移动后标定模板的图像,通过检测角点的方法检测出棋盘格标定模板上的十字相交点在图像中的像素坐标,并求解Perspective‑n‑Point问题来获取相机相对于标定模板的位姿,最后构建等式约束的运动学参数误差模型,并将模型转化为无约束模型来进行最优化求解。本发明提供的运动学参数标定方法,可以在相机坐标系和上平台坐标系变换关系未知的情况下,仅通过相对位姿变化