
一种基于双目视觉的机械臂运动学自标定方法.pdf

思洁****爱吗


1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于双目视觉的机械臂运动学自标定方法.pdf
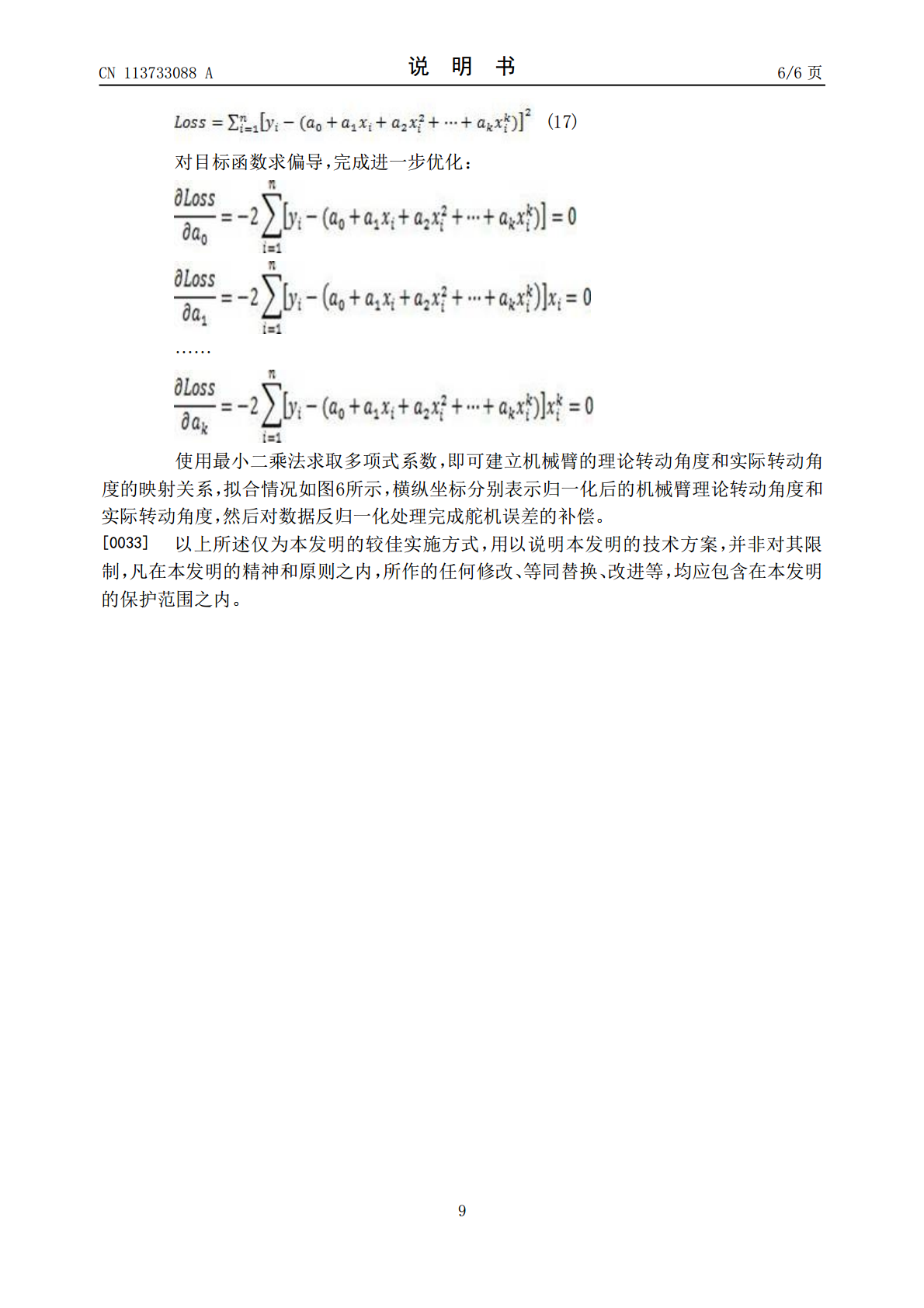
本发明涉及自适应控制领域,具体涉及一种基于双目视觉的机械臂运动学自标定方法。首先采集数据,通过双目相机获得机械臂末端位置信息、机械臂各关节实际转动角度及理论转动角度。然后将DH理论和手眼标定理论相融合,建立机械臂运动学混合模型。运用多种群自适应差分算法进行模型的训练,求解混合模型参数。最后通过拟合多项式的方法建立起各伺服电机模型,使用最小二乘法进行多项式参数的求解以及补偿预测。本发明所提出的混合模型和伺服电机模型可以极大的降低机械臂所受几何误差的影响,计算出更加实际的模型参数。不需要额外通过示教器建立手眼

基于高斯模型和视觉测量的机械臂在线自标定方法研究.docx
基于高斯模型和视觉测量的机械臂在线自标定方法研究机械臂在线自标定方法是机器人学领域的热门研究方向,它可以实时监测机械臂关节角度误差和位姿误差,并根据这些误差实现自身的校准,从而提高机械臂的精度和稳定性。本文以基于高斯模型和视觉测量的机械臂在线自标定方法为主题,分别从方法原理、关键技术和应用前景三个方面进行探讨。一、方法原理基于高斯模型和视觉测量的机械臂在线自标定方法是一种基于概率统计的机器人校准方法。首先,它利用高斯过程回归模型对关节角度误差进行建模,以此预测机械臂在运动过程中的有效位姿,通过对比实际位姿

基于高斯模型和视觉测量的机械臂在线自标定方法研究.pptx
汇报人:/目录01高斯模型的基本原理高斯模型在机械臂标定中的适用性高斯模型在机械臂标定中的优势02视觉测量的基本原理视觉测量在机械臂标定中的重要性视觉测量在机械臂标定中的实现方式03方法概述标定流程标定实验及结果分析04方法优势局限性分析改进方向05与传统标定方法的比较与其他在线自标定方法的比较综合评价06实际应用场景分析未来研究方向与展望汇报人:
一种基于双目视觉的机械臂抓取控制方法.pdf
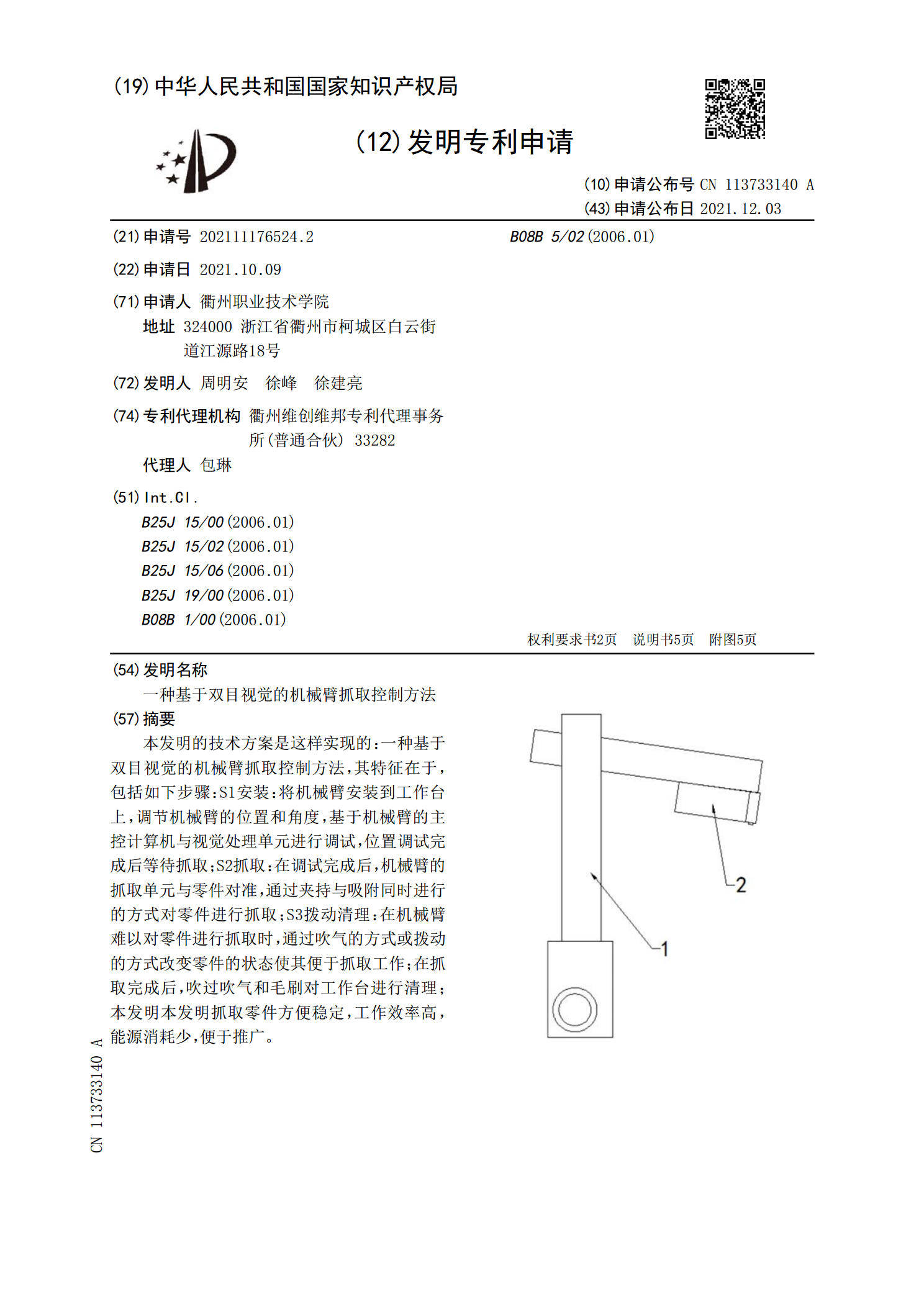
本发明的技术方案是这样实现的:一种基于双目视觉的机械臂抓取控制方法,其特征在于,包括如下步骤:S1安装:将机械臂安装到工作台上,调节机械臂的位置和角度,基于机械臂的主控计算机与视觉处理单元进行调试,位置调试完成后等待抓取;S2抓取:在调试完成后,机械臂的抓取单元与零件对准,通过夹持与吸附同时进行的方式对零件进行抓取;S3拨动清理:在机械臂难以对零件进行抓取时,通过吹气的方式或拨动的方式改变零件的状态使其便于抓取工作;在抓取完成后,吹过吹气和毛刷对工作台进行清理;本发明本发明抓取零件方便稳定,工作效率高,能

基于双目视觉的机器人目标定位与机械臂控制.docx
基于双目视觉的机器人目标定位与机械臂控制摘要机器人在工业、医疗、农业等领域得到广泛应用,其中基于双目视觉的机器人目标定位与机械臂控制是研究的热点之一。本文介绍了基于双目视觉的机器人目标定位与机械臂控制的原理和实现过程,并通过实验验证了该技术的可行性和效果。同时,对于该技术的进一步研究和应用提出了建议和展望。关键词:双目视觉,机器人,目标定位,机械臂控制引言机器人技术已经成为现代制造业和服务业不可或缺的一部分。传统的机器人在工作时需要精确的定位和运动控制,这对机器视觉和机器人控制技术提出了更高的要求。在机器