
一种机械臂末端构件标定方法.pdf

努力****承悦

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机械臂末端构件标定方法.pdf
本发明公开了一种机械臂末端构件标定方法,包括:通过光学定位系统识别末端构件上的标记点得到末端构件相对于光学定位系统的位姿;设定机械臂末端上一点,并以该点为基准设定三个方向,分别控制机械臂运动使得末端构件绕该点进行球面运动和使得末端构件以该三个方向为轴进行旋转运动,通过光学定位系统获取运动过程中标记点位置,据此计算得到机械臂末端相对于光学定位系统的位姿;根据机械臂设计参数得到机械臂末端相对于机械臂系统的位姿,据此计算得到末端构件相对于机械臂系统的位姿。本发明可以快速实现机械臂末端构件的标定,使得手术机器人的

一种机械臂末端姿态调整方法及装置.pdf
本申请公开了一种机械臂末端姿态调整方法及装置,应用于智能机器人,所述智能机器人包括基座和机械臂,所述方法包括:在预先设定的情况下,获取所述机械臂末端在基座坐标系O
一种可转换的机械臂末端夹具及机械臂.pdf
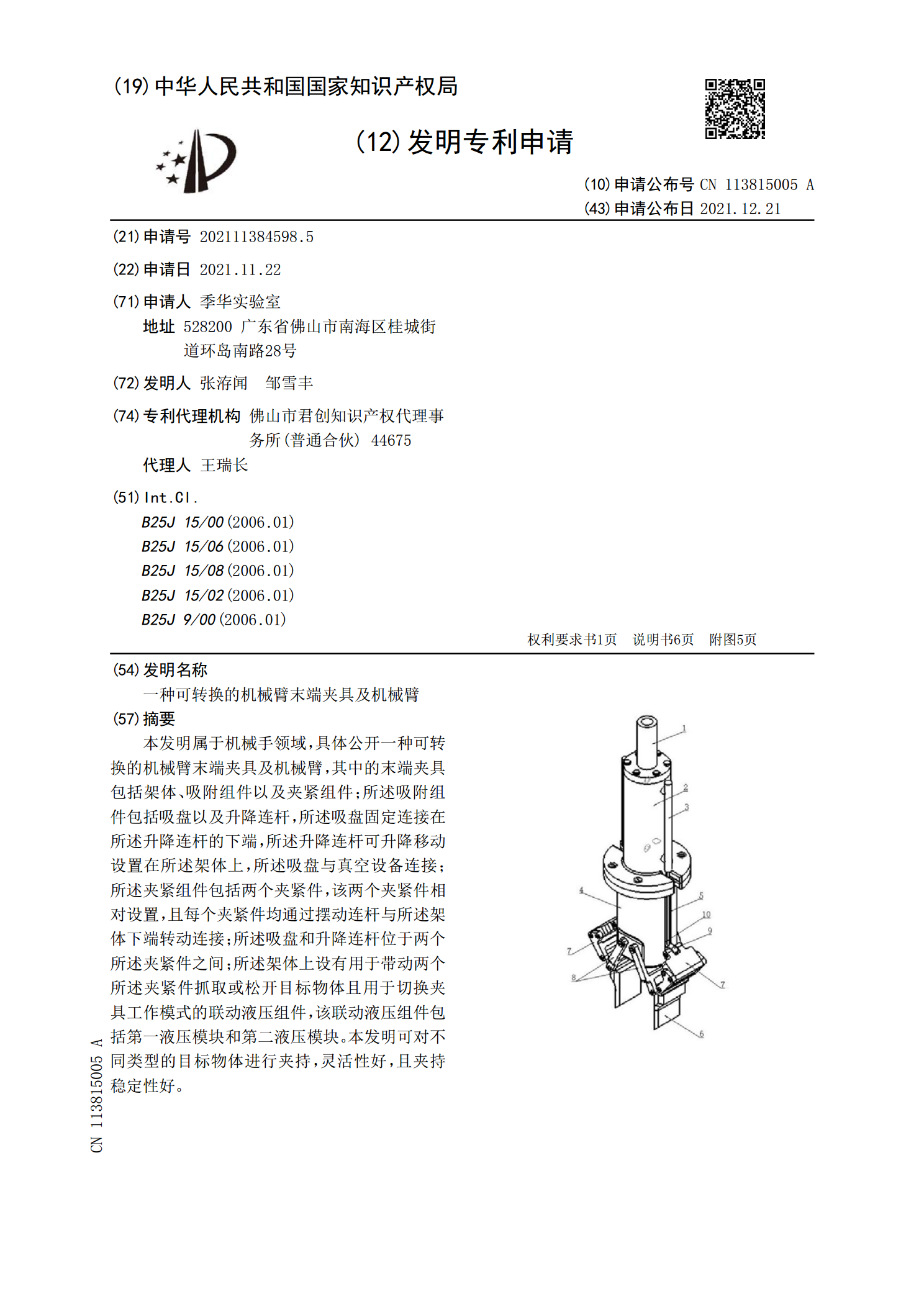
本发明属于机械手领域,具体公开一种可转换的机械臂末端夹具及机械臂,其中的末端夹具包括架体、吸附组件以及夹紧组件;所述吸附组件包括吸盘以及升降连杆,所述吸盘固定连接在所述升降连杆的下端,所述升降连杆可升降移动设置在所述架体上,所述吸盘与真空设备连接;所述夹紧组件包括两个夹紧件,该两个夹紧件相对设置,且每个夹紧件均通过摆动连杆与所述架体下端转动连接;所述吸盘和升降连杆位于两个所述夹紧件之间;所述架体上设有用于带动两个所述夹紧件抓取或松开目标物体且用于切换夹具工作模式的联动液压组件,该联动液压组件包括第一液压模
一种空间机械臂末端抓取机构与抓取方法.pdf
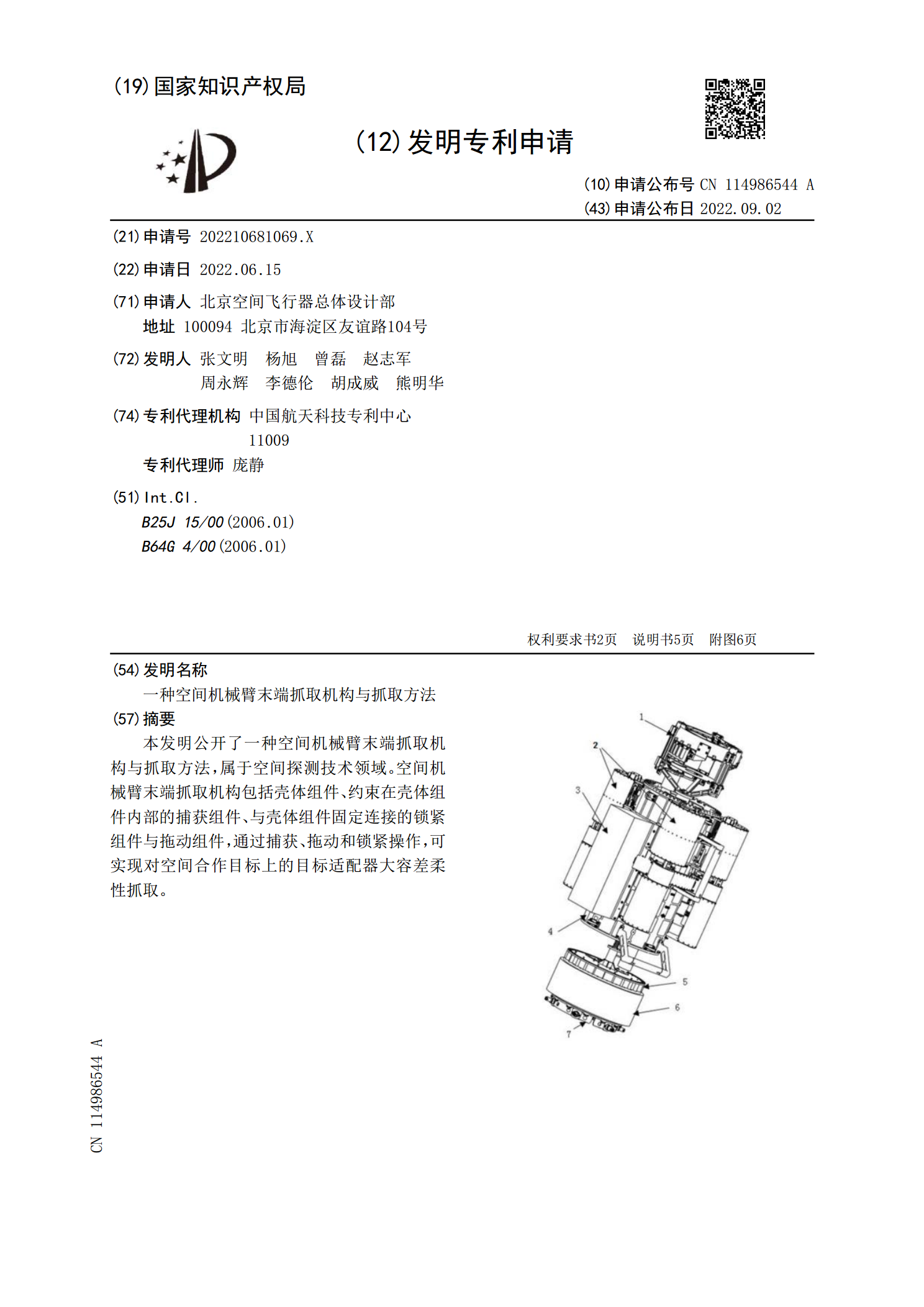
本发明公开了一种空间机械臂末端抓取机构与抓取方法,属于空间探测技术领域。空间机械臂末端抓取机构包括壳体组件、约束在壳体组件内部的捕获组件、与壳体组件固定连接的锁紧组件与拖动组件,通过捕获、拖动和锁紧操作,可实现对空间合作目标上的目标适配器大容差柔性抓取。

一种机械臂手眼标定装置及方法.pdf
本发明适用于机器人视觉技术领域,提供了一种机械臂手眼标定装置及方法,装置包括:垂直标定板,垂直标定板由两标定板组成,两标定板垂直固定,两标定板的交线位于标定板的侧边,标定板的表面设有定位点,定位点关于交线对称设立,垂直标定板通过两长度可调节的支撑杆与行架固定;圆盘,圆盘的一侧设有滑块,滑块与滑轨滑动连接,滑轨垂直于行架设置;机械臂设于行架的下方,机械臂的末端装有标定头,机械臂通过底座与模组滑动连接,底座上设有激光雷达,激光雷达位于标定板的下方。标定板设计为垂直状,便于建立工具坐标系,标定板上设计了定位点,