
Stewart平台运动学参数的机器视觉标定方法.pdf

一吃****春艳

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
Stewart平台运动学参数的机器视觉标定方法.pdf
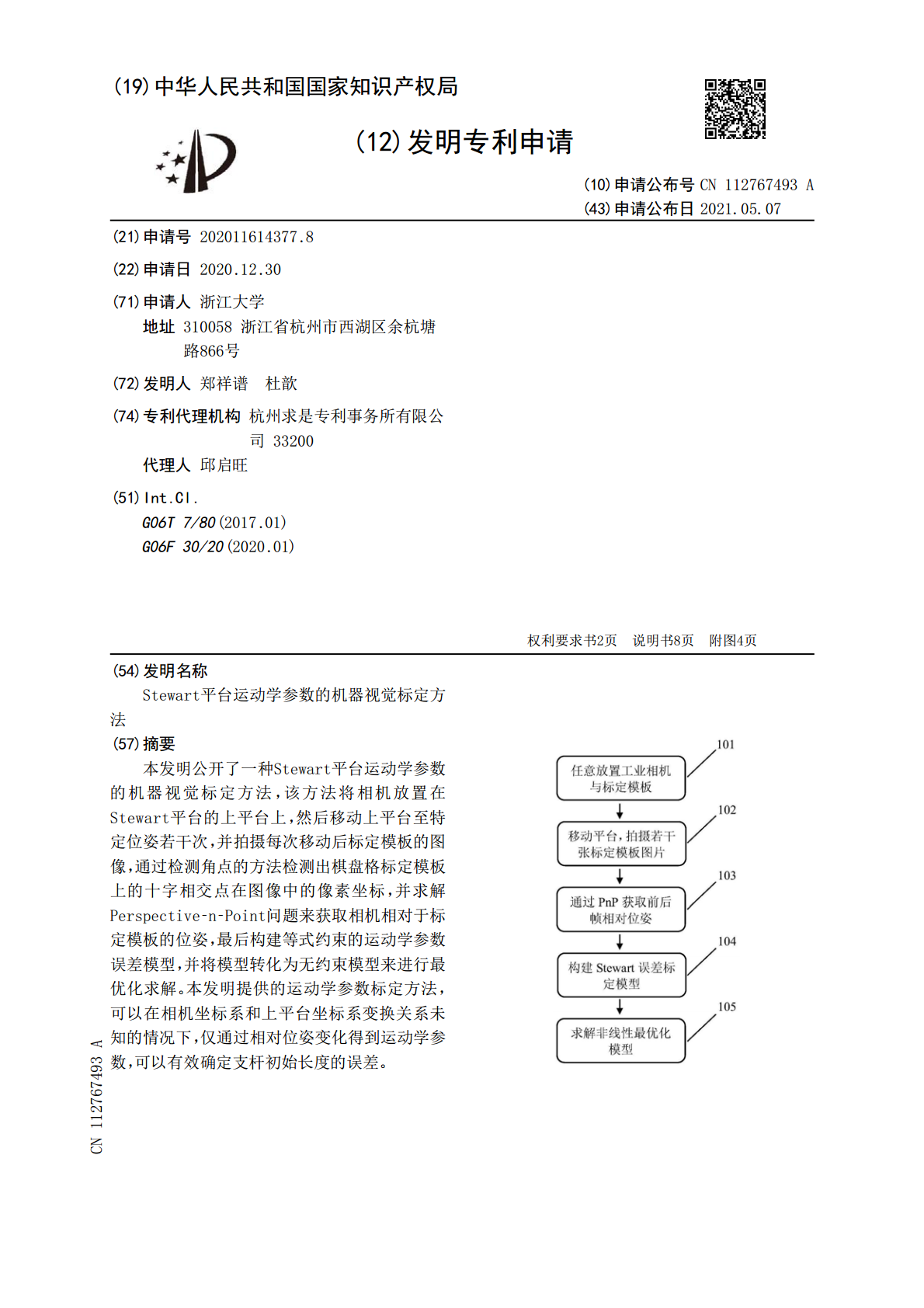
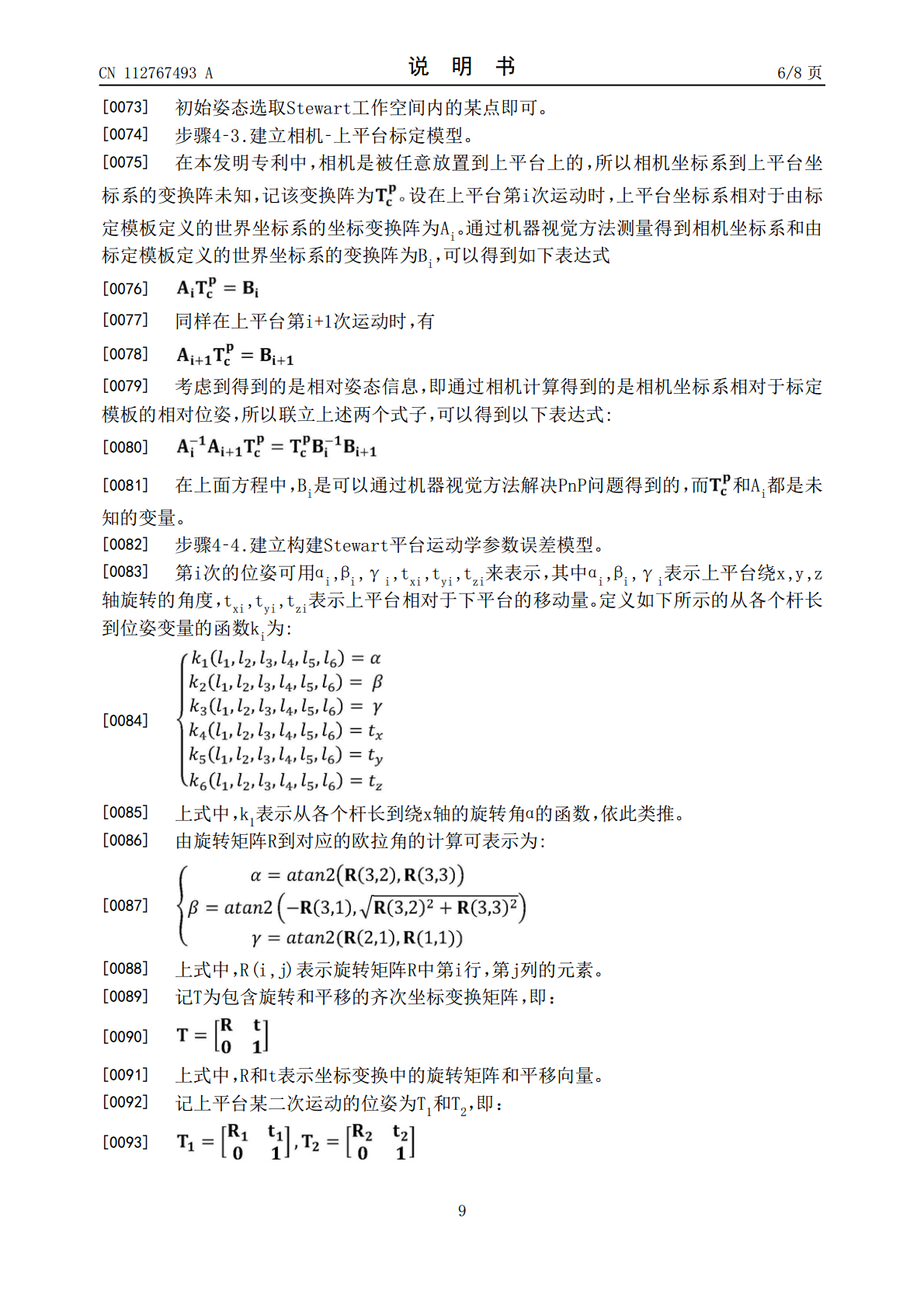
本发明公开了一种Stewart平台运动学参数的机器视觉标定方法,该方法将相机放置在Stewart平台的上平台上,然后移动上平台至特定位姿若干次,并拍摄每次移动后标定模板的图像,通过检测角点的方法检测出棋盘格标定模板上的十字相交点在图像中的像素坐标,并求解Perspective‑n‑Point问题来获取相机相对于标定模板的位姿,最后构建等式约束的运动学参数误差模型,并将模型转化为无约束模型来进行最优化求解。本发明提供的运动学参数标定方法,可以在相机坐标系和上平台坐标系变换关系未知的情况下,仅通过相对位姿变化
一种基于视觉的多足机器人运动学参数标定方法.pdf
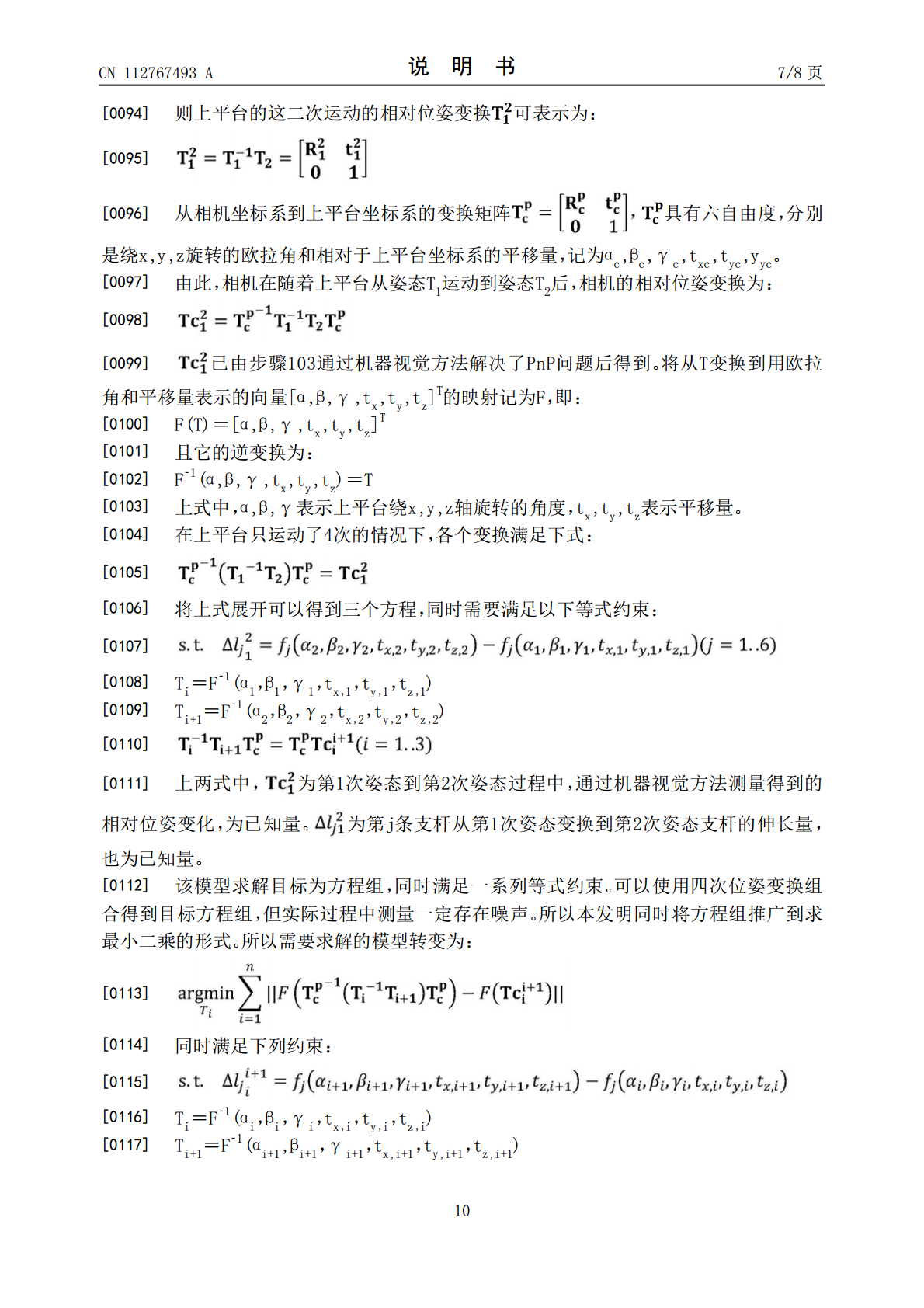
本发明公开了一种基于视觉的多足机器人运动学参数标定方法。分别在机器人的机身和足端固定标定板,利用单目相机获得标定板的位姿,进而获得机器人机身与足端的相对位姿关系;根据机器人的关节角度数据,通过正运动学计算机身与足端的名义位姿关系,构建误差矩阵,利用最小二乘法估计运动学参数误差。本发明利用视觉技术依次对多足机器人的每条腿进行运动学参数标定,能够快速准确地完成运动学参数标定过程,可提高多足机器人足端的定位精度,从而改善多足机器人的行走效果。本方法仅需要单目相机和两块标定板即可完成多足机器人的运动学参数标定过程

机器人视觉定位方法和装置、视觉标定方法和装置.pdf
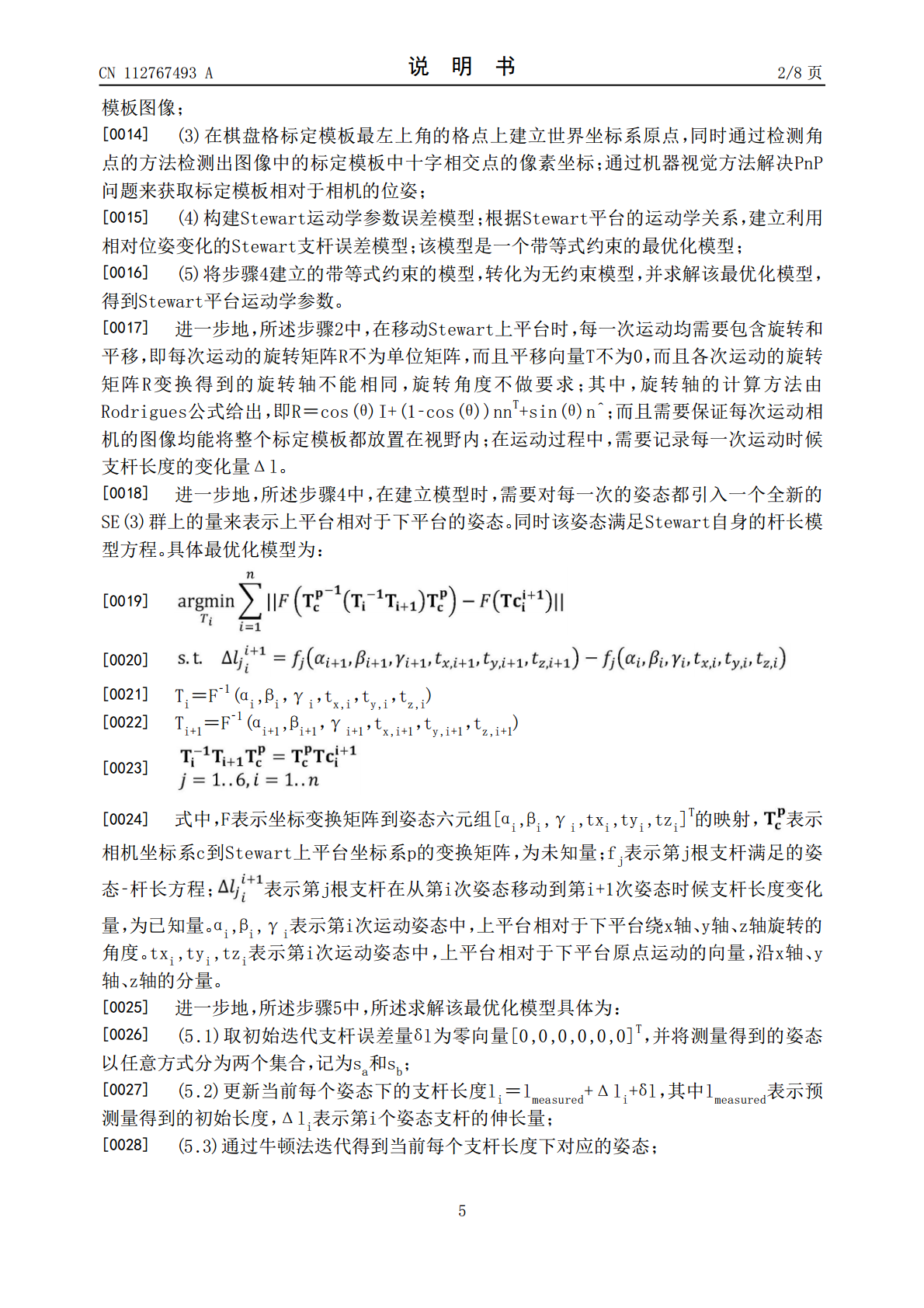
本发明提出了一种机器人视觉定位方法和装置,该方法包括:获取目标图像,对所述目标图像进行预处理;根据预设的分割参数对图像进行特征分割,对分割后的图像进行滤波处理,对滤波后的图像进行连通域检测提取组成特征标志的亮斑,对提取的亮斑进行过滤处理,判断过滤后的亮斑数目是否符合预设的数目,若否,则重新调整分割参数,进行重新检测,若是,则识别亮斑轮廓线,判断识别出的亮斑轮廓线与预设的模板轮廓线是否匹配,若是,则输出识别出的特征标志。该方法通过自动调整分割参数,使得分割后的轮廓符合初始设置条件,适应光照条件不同的图像检测
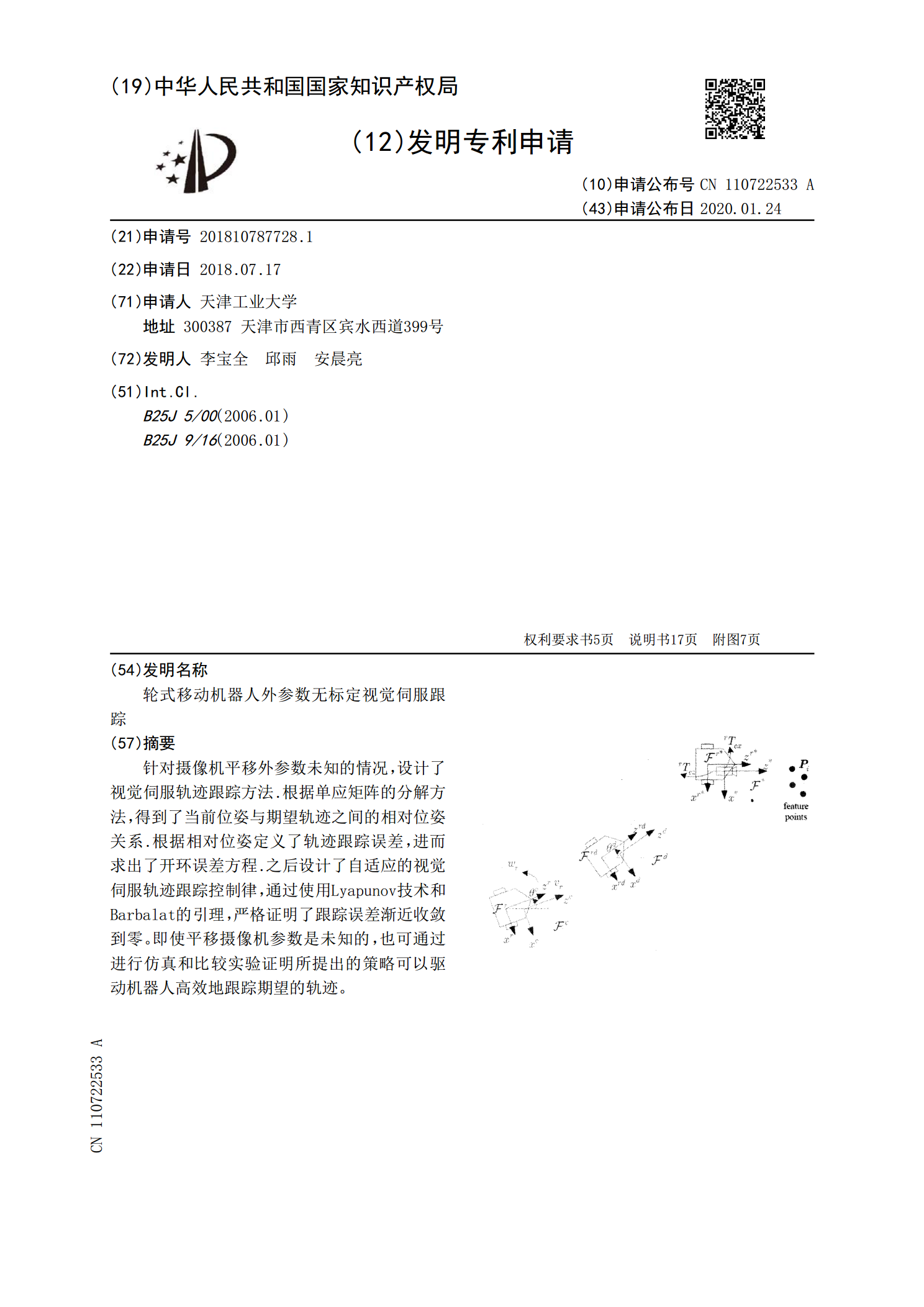
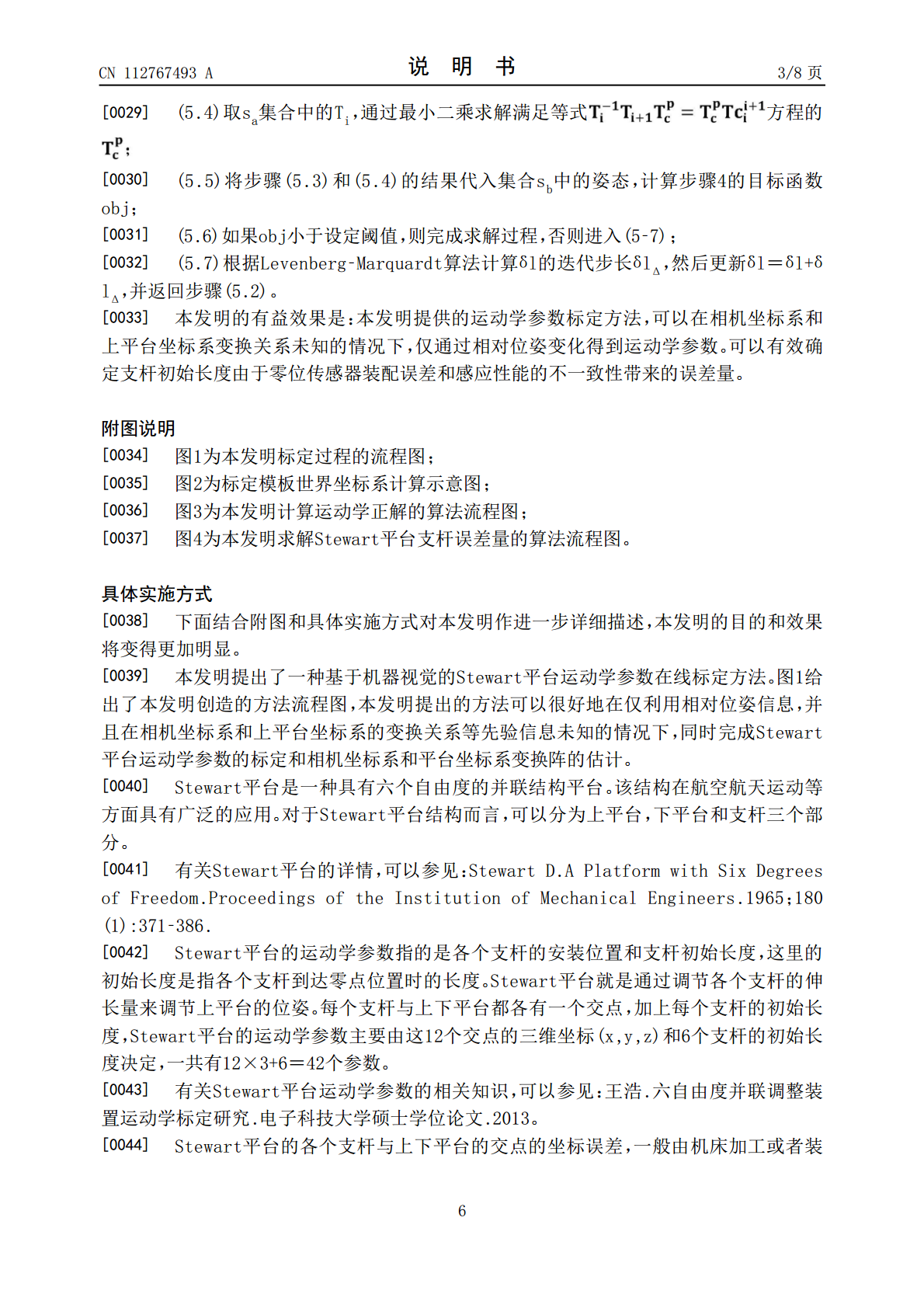
轮式移动机器人外参数无标定视觉伺服跟踪.pdf
针对摄像机平移外参数未知的情况,设计了视觉伺服轨迹跟踪方法.根据单应矩阵的分解方法,得到了当前位姿与期望轨迹之间的相对位姿关系.根据相对位姿定义了轨迹跟踪误差,进而求出了开环误差方程.之后设计了自适应的视觉伺服轨迹跟踪控制律,通过使用Lyapunov技术和Barbalat的引理,严格证明了跟踪误差渐近收敛到零。即使平移摄像机参数是未知的,也可通过进行仿真和比较实验证明所提出的策略可以驱动机器人高效地跟踪期望的轨迹。
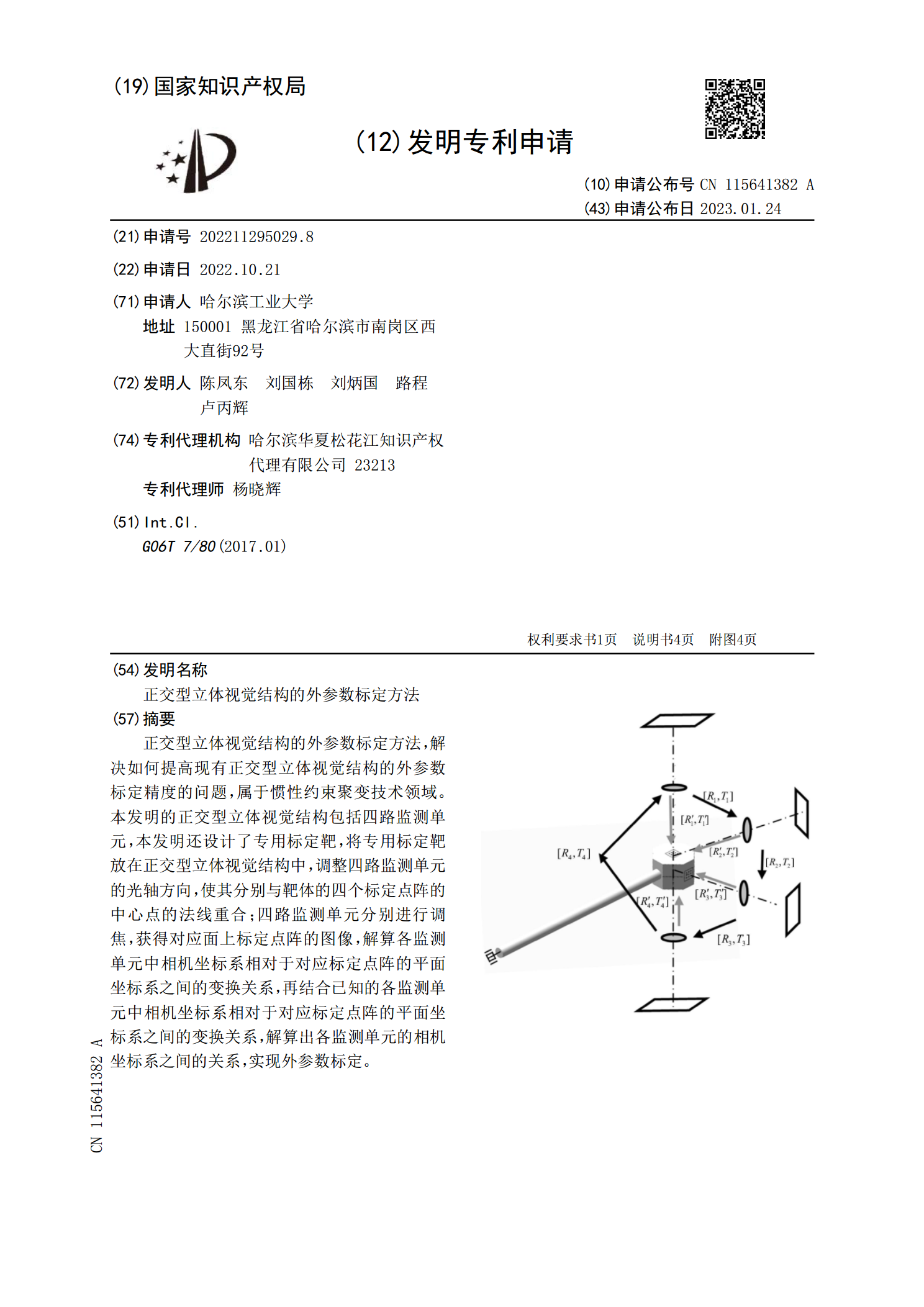
正交型立体视觉结构的外参数标定方法.pdf
正交型立体视觉结构的外参数标定方法,解决如何提高现有正交型立体视觉结构的外参数标定精度的问题,属于惯性约束聚变技术领域。本发明的正交型立体视觉结构包括四路监测单元,本发明还设计了专用标定靶,将专用标定靶放在正交型立体视觉结构中,调整四路监测单元的光轴方向,使其分别与靶体的四个标定点阵的中心点的法线重合;四路监测单元分别进行调焦,获得对应面上标定点阵的图像,解算各监测单元中相机坐标系相对于对应标定点阵的平面坐标系之间的变换关系,再结合已知的各监测单元中相机坐标系相对于对应标定点阵的平面坐标系之间的变换关系,