
路径跟踪方法、装置、车辆及存储介质.pdf

子璇****君淑

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路径跟踪方法、装置、车辆及存储介质.pdf
本发明属于路径规划技术领域,公开了一种路径跟踪方法、装置、车辆及存储介质。该方法包括:获取全局规划路径;当检测到前方存在障碍物时,生成局部规划路径;根据所述全局规划路径以及所述局部规划路径生成目标规划路径;基于纵向以及横向控制车辆跟踪所述目标规划路径。通过上述方式,获取车辆的全局规划路径以及车辆遇见障碍物时的局部规划路径确定目标规划路径,从而提升路径规划使得准确度,并基于车辆的纵向以及横向控制车辆跟踪目标规划路径,从而提升了跟踪规划路径的精度。
作业车辆路径跟踪控制方法、装置、电子装置和存储介质.pdf
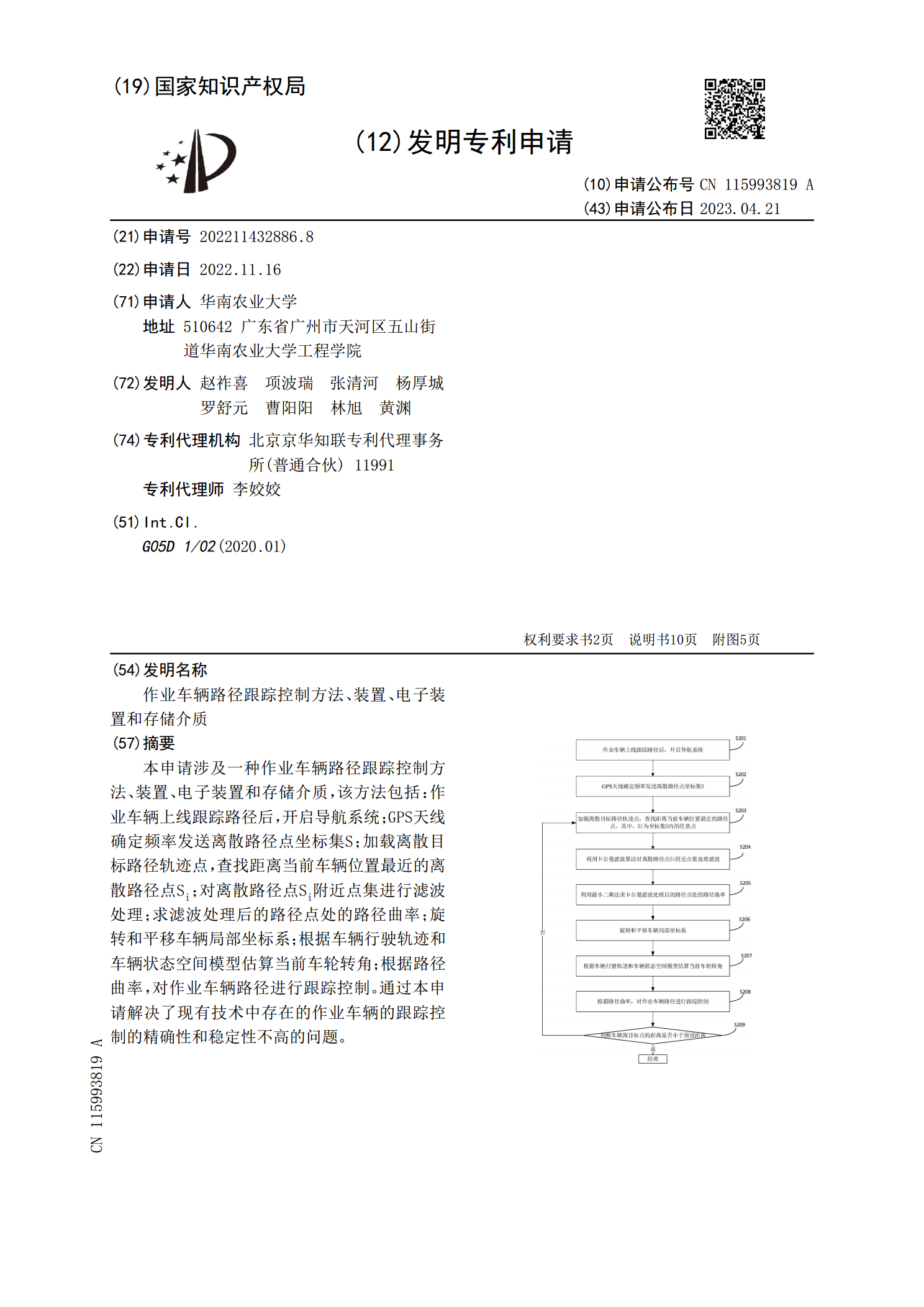
本申请涉及一种作业车辆路径跟踪控制方法、装置、电子装置和存储介质,该方法包括:作业车辆上线跟踪路径后,开启导航系统;GPS天线确定频率发送离散路径点坐标集S;加载离散目标路径轨迹点,查找距离当前车辆位置最近的离散路径点S
行驶路径的评分方法、装置、车辆及存储介质.pdf
本申请公开了一种行驶路径的评分方法、装置、车辆及存储介质,属于车辆控制技术领域。应用于车辆,该方法包括:获取目标行驶路径中每个位置处的路径参数以及车辆在每个位置上的预测实际速度;获取与每个位置的路径参数对应的第一加速度;根据每个位置的路径参数以及预测实际速度,确定每个位置处的第二加速度;根据每个位置处的第一加速度和第二加速度,确定目标行驶路径的路径评分。本申请在行驶路径的规划过程中,通过根据规划的目标行驶路径中每个位置处的路径参数以及预测实际速度,计算第一加速度以及第二加速度,结合第一加速度和第二加速度对
泊车路径规划方法、泊车路径规划装置、车辆及存储介质.pdf
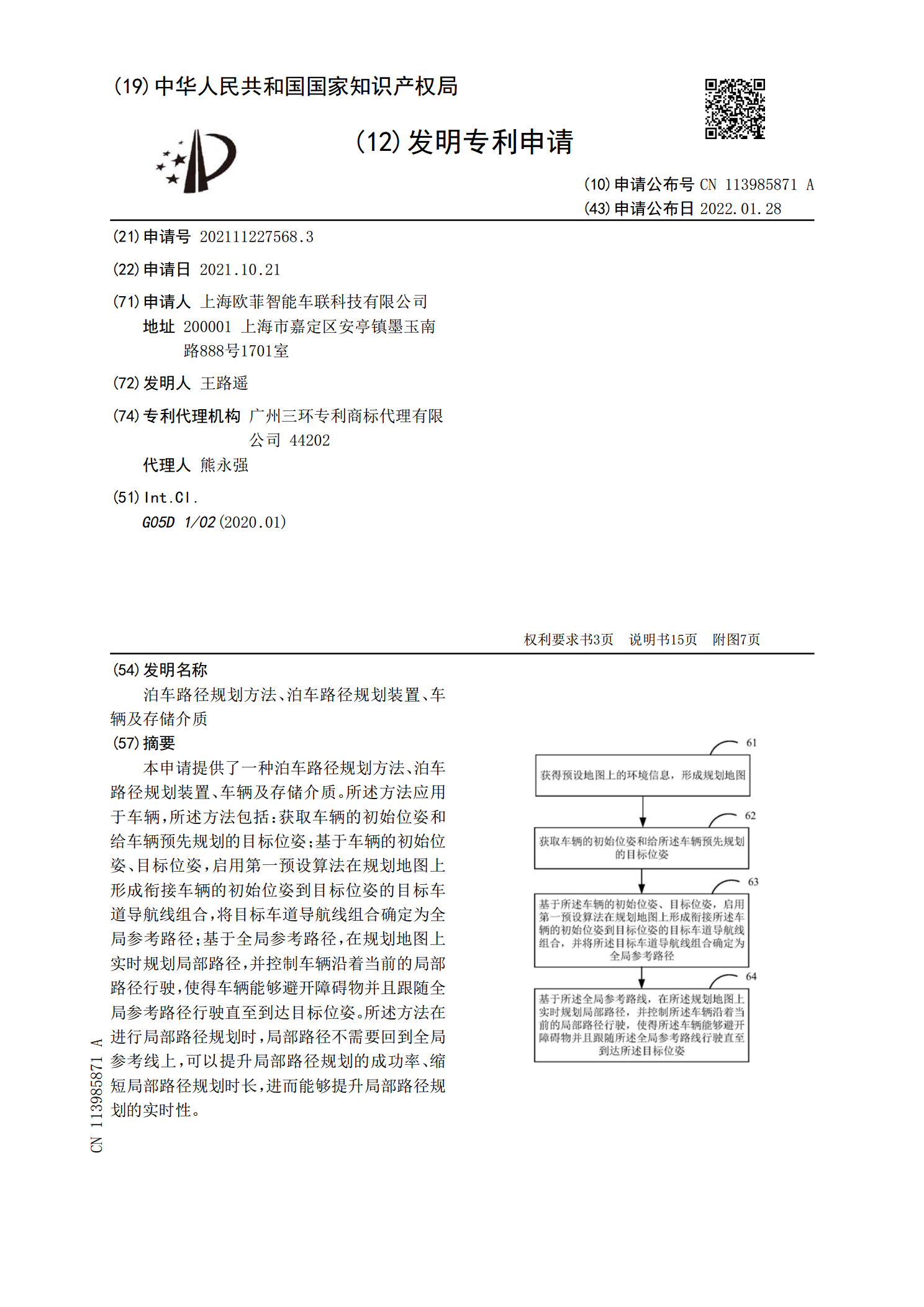
本申请提供了一种泊车路径规划方法、泊车路径规划装置、车辆及存储介质。所述方法应用于车辆,所述方法包括:获取车辆的初始位姿和给车辆预先规划的目标位姿;基于车辆的初始位姿、目标位姿,启用第一预设算法在规划地图上形成衔接车辆的初始位姿到目标位姿的目标车道导航线组合,将目标车道导航线组合确定为全局参考路径;基于全局参考路径,在规划地图上实时规划局部路径,并控制车辆沿着当前的局部路径行驶,使得车辆能够避开障碍物并且跟随全局参考路径行驶直至到达目标位姿。所述方法在进行局部路径规划时,局部路径不需要回到全局参考线上,可
车辆跟踪方法及装置、电子设备及存储介质.pdf
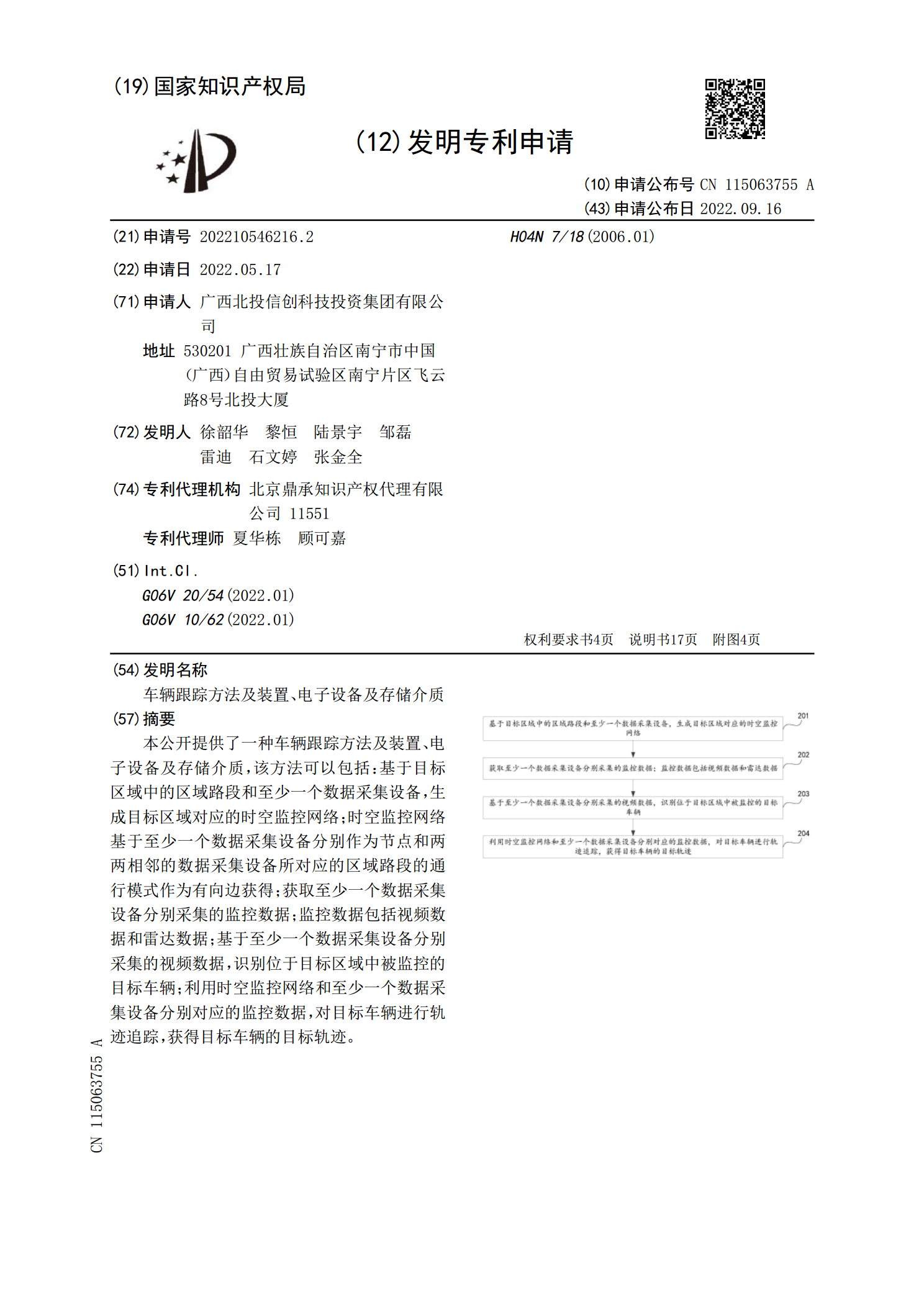
本公开提供了一种车辆跟踪方法及装置、电子设备及存储介质,该方法可以包括:基于目标区域中的区域路段和至少一个数据采集设备,生成目标区域对应的时空监控网络;时空监控网络基于至少一个数据采集设备分别作为节点和两两相邻的数据采集设备所对应的区域路段的通行模式作为有向边获得;获取至少一个数据采集设备分别采集的监控数据;监控数据包括视频数据和雷达数据;基于至少一个数据采集设备分别采集的视频数据,识别位于目标区域中被监控的目标车辆;利用时空监控网络和至少一个数据采集设备分别对应的监控数据,对目标车辆进行轨迹追踪,获得目