
泊车路径规划方法、泊车路径规划装置、车辆及存储介质.pdf

静芙****可爱


1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
泊车路径规划方法、泊车路径规划装置、车辆及存储介质.pdf
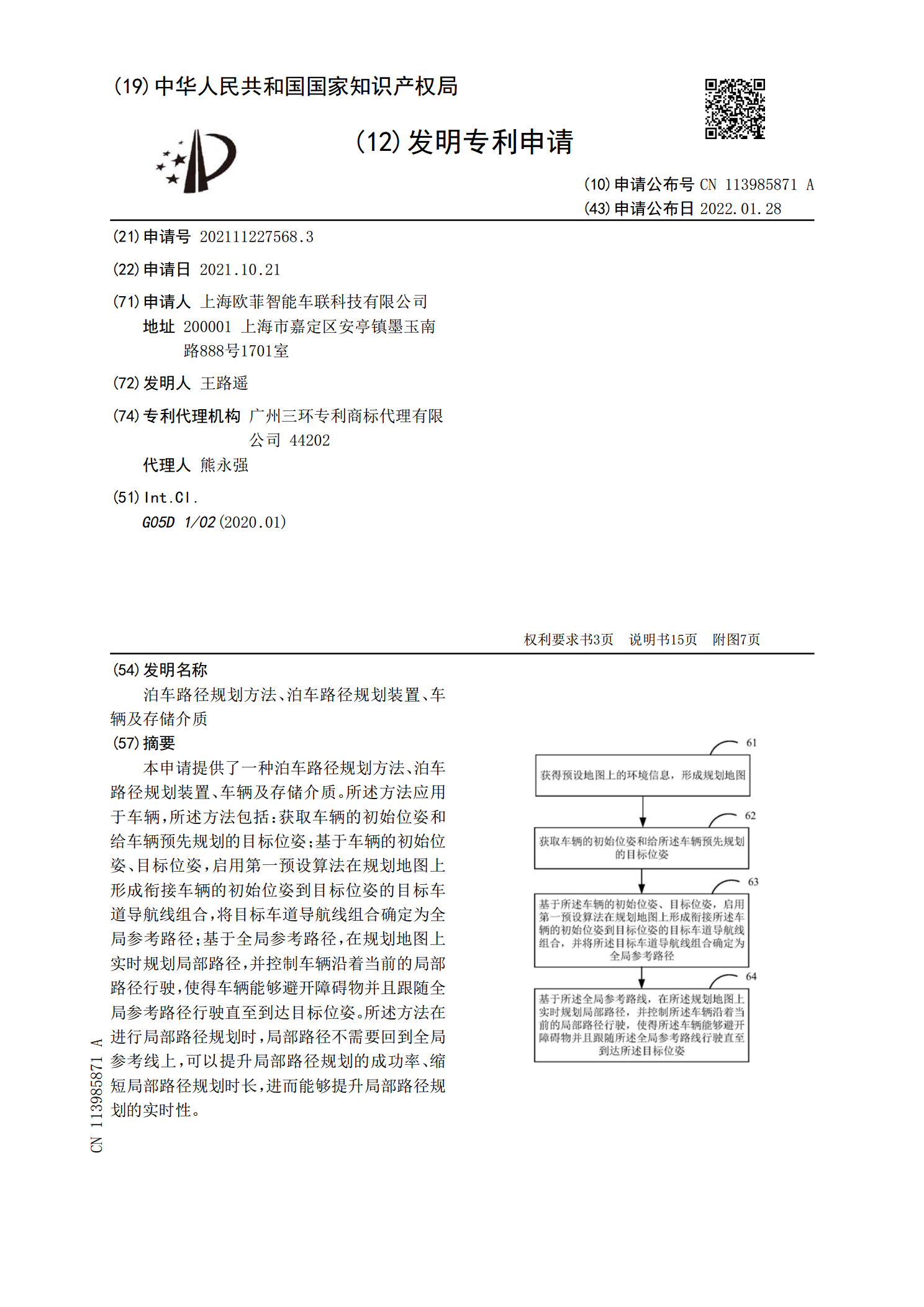
本申请提供了一种泊车路径规划方法、泊车路径规划装置、车辆及存储介质。所述方法应用于车辆,所述方法包括:获取车辆的初始位姿和给车辆预先规划的目标位姿;基于车辆的初始位姿、目标位姿,启用第一预设算法在规划地图上形成衔接车辆的初始位姿到目标位姿的目标车道导航线组合,将目标车道导航线组合确定为全局参考路径;基于全局参考路径,在规划地图上实时规划局部路径,并控制车辆沿着当前的局部路径行驶,使得车辆能够避开障碍物并且跟随全局参考路径行驶直至到达目标位姿。所述方法在进行局部路径规划时,局部路径不需要回到全局参考线上,可
自动泊车路径规划方法、装置、设备及可读存储介质.pdf
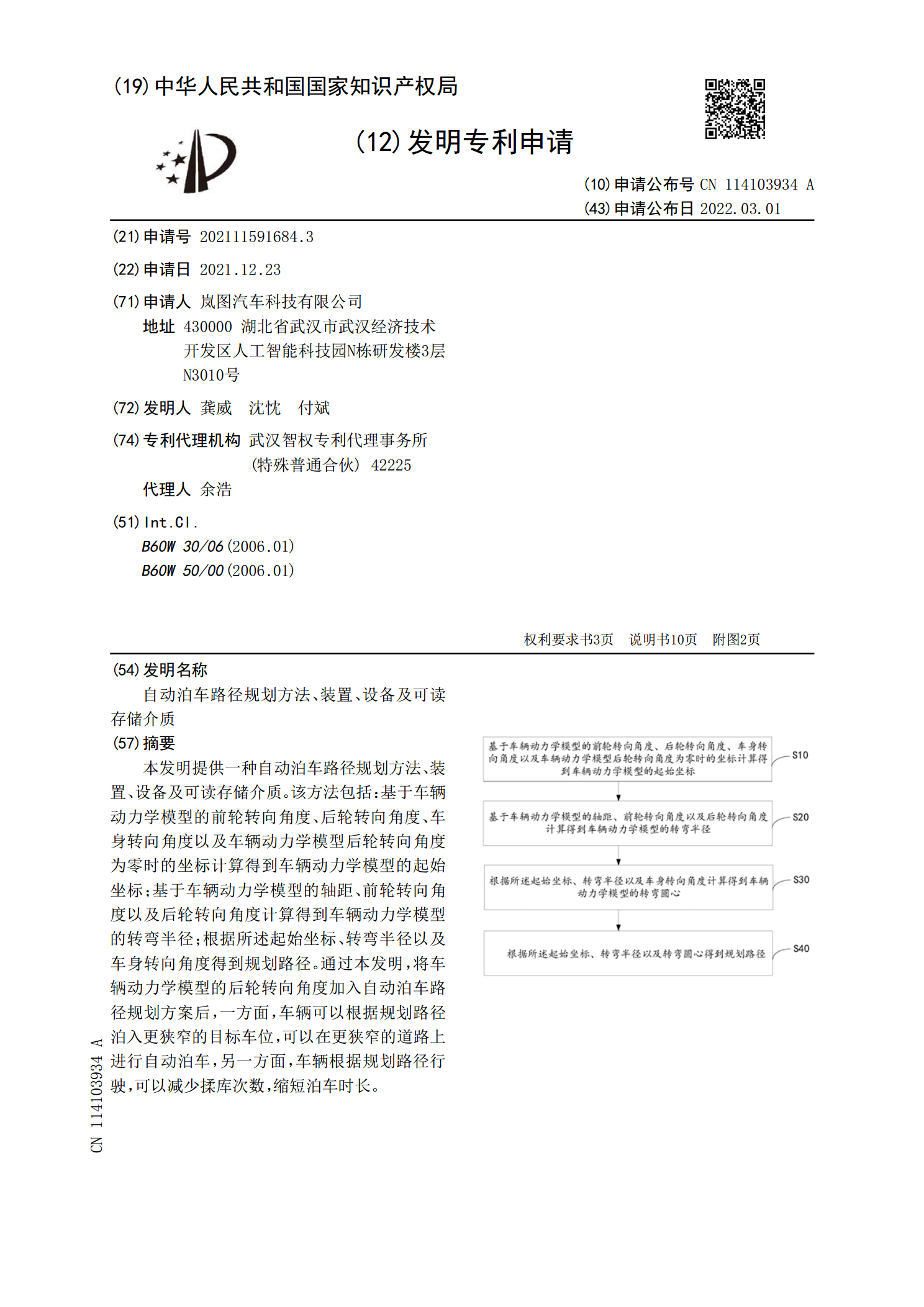
本发明提供一种自动泊车路径规划方法、装置、设备及可读存储介质。该方法包括:基于车辆动力学模型的前轮转向角度、后轮转向角度、车身转向角度以及车辆动力学模型后轮转向角度为零时的坐标计算得到车辆动力学模型的起始坐标;基于车辆动力学模型的轴距、前轮转向角度以及后轮转向角度计算得到车辆动力学模型的转弯半径;根据所述起始坐标、转弯半径以及车身转向角度得到规划路径。通过本发明,将车辆动力学模型的后轮转向角度加入自动泊车路径规划方案后,一方面,车辆可以根据规划路径泊入更狭窄的目标车位,可以在更狭窄的道路上进行自动泊车,另
用于垂直与斜列泊车路径规划方法、系统、存储介质及车辆.pdf
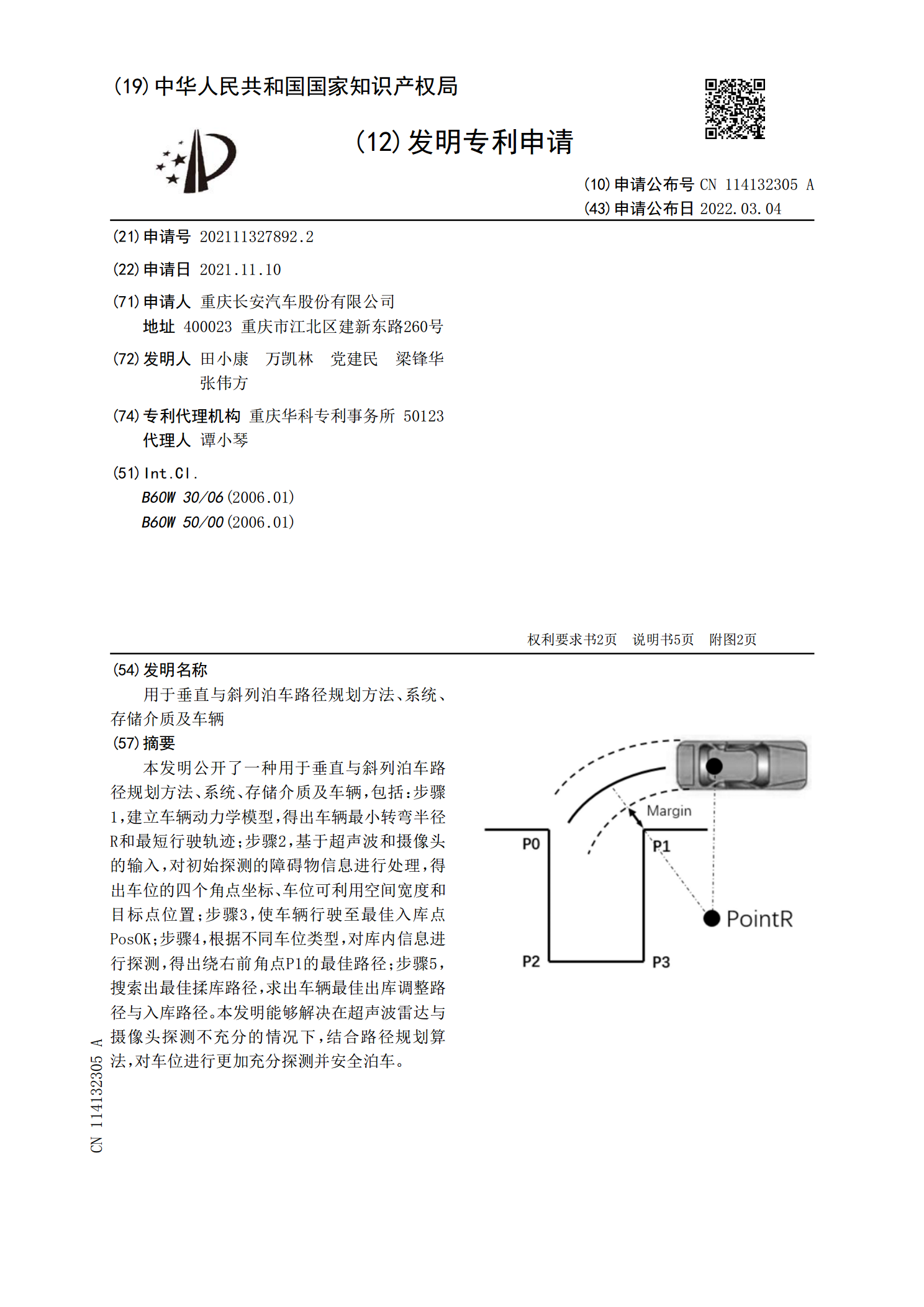
本发明公开了一种用于垂直与斜列泊车路径规划方法、系统、存储介质及车辆,包括:步骤1,建立车辆动力学模型,得出车辆最小转弯半径R和最短行驶轨迹;步骤2,基于超声波和摄像头的输入,对初始探测的障碍物信息进行处理,得出车位的四个角点坐标、车位可利用空间宽度和目标点位置;步骤3,使车辆行驶至最佳入库点PosOK;步骤4,根据不同车位类型,对库内信息进行探测,得出绕右前角点P1的最佳路径;步骤5,搜索出最佳揉库路径,求出车辆最佳出库调整路径与入库路径。本发明能够解决在超声波雷达与摄像头探测不充分的情况下,结合路径规

一种泊车路径规划方法、装置、电子设备和存储介质.pdf
本发明提供了一种泊车路径规划方法、装置、电子设备及存储介质,所述泊车路径规划方法包括:在预先建立的泊车环境模型中,确定泊车路径的起始点和目标点;基于所述起始点和所述目标点,利用至少两种路径规划算法对泊车路径进行规划,获得至少一个规划路径;当所述至少一个规划路径仅包括一个规划路径时,所述规划路径为目标规划路径;当所述至少一个规划路径包括至少两个规划路径时,根据预设选择算法确定所述至少两个规划路径中的其中一个规划路径为所述目标规划路径。本发明避免了单一路径规划算法的局限性,提高了目标规划路径的可靠性和合理性。

自动泊车路径规划方法、设备及计算机可读存储介质.pdf
本发明公开了一种自动泊车路径规划方法、设备及计算机存储介质,该方法包括:获得待规划路径所在场所的平面环境信息,并基于所述平面环境信息确定第一规划路线;其中,所述平面环境信息包括车辆的当前位置和目标车位;对第一规划路线中的转弯路段依所述车辆的转向能力进行优化,使得优化后的转弯路段满足曲率连续;将所述优化后的第一规划路线中的各路线元素的存储顺序依车辆行进方向进行调整,得到用于所述车辆自动泊车的第二规划路线;本发明实施例的路径规划过程中约束简单,能有效提高路径规划速度、降低路径规划难度。